1.本发明涉及可折展的棱柱结构领域,特别是涉及一种大折展比、具有旋转运动的可折展棱柱结构。
背景技术:
2.可折展结构是一种几何形状可控、可变的结构,其可实现紧密折叠状态与目标展开状态间的转换。该类结构处于折叠态时,具有较小体积便于收纳存储和运输,处于展开状态时可满足正常工作的需求。可折展结构因其具有良好的折叠特性,现已广泛应用于各工程领域,如航空航天领域的可折展卫星天线、可折展太阳能电池阵和可折展机翼,土木建筑领域的临时帐篷、可折展穹顶、可折展家具,生物医学领域的可折展血管支架、手术钳等。
3.现有可折展结构种类繁多,根据其目标展开状态的几何形态可以分为一维杆状可折展结构、二维面状可折展结构、三维体状可折展结构。其中,一维杆状可折展结构主要涉及单一方向的折展,如太空伸展臂;二维面状可折展结构主要涉及平面和曲面的折展,如太阳能电池阵、卫星天线;三维体状可折展结构主要涉及球面、多面体、棱柱等的折展,此类可折展结构多数采用非刚性变形实现折展,如汽车安全气囊、柔性太空舱。目前,部分三维体状可折展结构可实现刚性折展,如专利“一种具有面对称运动的可折展盒子结构”(公开号:cn111776402a)、专利“一种单自由度可折展盒子结构”(公开号:cn109353634b)、专利“一种转动副对称排布的可折展盒子结构”(公开号:cn111846510a)通过去除棱柱结构的上底面并在侧面设计折痕实现棱柱各组成面的刚性折展。但是目前关于棱柱结构保持具有封闭内部空间的棱柱状态并实现刚性折展的应用比较少,并且还存在折叠展开比例不大等不足。
技术实现要素:
4.本发明的目的是为了克服现有技术中的不足,提供一种具有旋转运动的可折展棱柱结构。该结构拥有棱柱状态、展开状态和折叠状态;棱柱状态形成封闭的内部空间,拥有较好的刚度;展开状态具有较大的工作空间;折叠时体积较小方便收纳和运输。结构组成简单、旋转运动方向可变、几何参数可调、可进行批量化生产。基于上述优点,本发明在收纳、包装、土木、建筑、航空航天、手性材料等领域中具有重要的意义和广阔的应用前景。
5.本发明的目的是通过以下技术方案实现的:
6.一种具有旋转运动的可折展棱柱结构,包括一个顶面、一个底面和三个以上的模块;所述顶面为边数≥3的正多边形;所述底面是与顶面全等的正多边形;所述模块的数量与顶面的边数相同,且各模块的结构相同,每个模块包含四个全等的直角三角形面,依次为第一面、第二面、第三面、第四面,且每个模块中的第一面、第二面、第三面、第四面依次相连;
7.所述顶面、底面平行,顶面和底面分别位于可折展棱柱结构的顶部和底部;每个模块放置于顶面和底面之间;每个模块的第一面的一条边与顶面的一条边相连,对应的每个模块的第四面的一条边与底面的一条边相连;
8.所述第一面与第二面相邻并通过第一转动副相互连接,所述第二面与第三面相邻并通过第二转动副相互连接,所述第三面与第四面相邻并通过第三转动副相互连接;所述顶面与模块的第一面相邻并通过模块的上边转动副相互连接;所述底面与同一模块的第四面相邻并通过模块的下边转动副相互连接;
9.可折展棱柱结构在展开与折叠过程中,所述顶面、底面保持平行且几何中心位于同一轴线即中轴线时,所述顶面在空间上能够绕中轴线做相对于底面的旋转运动;所述顶面的几何中心沿所述中轴线做相对于底面的直线运动;所述模块在空间上关于所述中轴线呈旋转对称分布。
10.进一步的,通过镜像操作,能够得到展开和折叠过程具有相反旋转运动的可折展棱柱结构。
11.进一步的,通过对可折展棱柱结构每个面的面外方向增加厚度,实现厚板棱柱结构的折叠。
12.进一步的,通过改变所述顶面与底面正多边形的边数,确定模块数量的变化,实现可折展棱柱结构运动特性的改变。
13.进一步的,通过若干个可折展棱柱结构之间底面与顶面的连接、侧面与侧面的连接以及两种连接方式的组合,实现若干个可折展棱柱结构之间的组合、若干个镜像后的可折展棱柱结构之间的组合、若干个可折展棱柱结构与镜像后的可折展棱柱结构之间的组合。
14.进一步的,通过改变直角三角形的尺寸,获得不同折展比和不同工作空间。
15.进一步的,所述转动副为铰链、合页或轴承中的一种。
16.与现有技术相比,本发明的技术方案所带来的有益效果是:
17.1.本发明的可折展棱柱结构折叠状态为两层板厚,棱柱状态为棱柱总高度,其折展比大,可将棱柱结构展开并完全折平,折叠状态形状规整,便于储存和运输。
18.2.本发明的可折展棱柱结构可进行镜像操作得到旋转方向相反的镜像可折展棱柱结构,两种结构互为手性结构,在手性材料的结构设计中有潜在的应用前景。
19.3.本发明的可折展棱柱结构可根据需求自由选择底面的多边形结构、设计可折展棱柱结构和运动副的尺寸,棱柱状态具有可灵活设计的内部空腔,设计空间大,有利于后续在包装、家具、土木、可展结构等方面开展创新设计。
20.4.本发明的可折展棱柱结构简单,便于加工制造与批量化生产。
21.5.本发明的可折展棱柱结构可进行两个甚至多个的串联组合,通过驱动设计可将每个可折展棱柱结构作为独立的控制单元,为机器人驱动臂设计提供新方案。
22.6.本发明的可折展棱柱结构可进行四个甚至多个的二维和三维组合,形成折展比更大、棱柱状态工作空间更大的可折展棱柱组合结构,可应用于太空居所和地外房屋群的设计。
23.7.本发明的可折展棱柱组合结构可根据需求通过设计各个面的厚度并选取合适的材料,提高棱柱结构的刚度和强度,可用于设计可折展减振吸能结构。
24.8.本发明的可折展棱柱组合结构,其各棱柱结构间的连接简单,便于进行空间自组装可展结构的设计。
附图说明
25.图1-1为本发明所指定的模块的平面展开示意图,图1-2和图1-3分别为模块的部分折叠状态的结构示意图及其镜像结构示意图,作为组成可折展棱柱结构的模块。
26.图2-1为实施例一可折展三棱柱结构的展开状态结构示意图,图2-2至图2-5为实施例一可折展三棱柱结构的顺序展开与折叠的示意图。
27.图3-1为实施例一可折展三棱柱结构的镜像结构展开状态结构示意图,图3-2至图3-5为实施例一可折展三棱柱结构的镜像结构的顺序展开与折叠的示意图。
28.图4-1为可折展三棱柱组合结构中两个三棱柱结构的组合连接示意图,图4-2为组合结构的棱柱状态,图4-3为组合结构的展开中间状态,图4-4为组合结构的完全展开状态,图4-5为组合结构的完全折叠状态。
29.图5-1为一个可折展三棱柱结构与其一个镜像结构的组合连接示意图,图5-2为组合结构的棱柱状态,图5-3为组合结构的展开中间状态,图5-4为组合结构的完全展开状态,图5-5为组合结构的完全折叠状态。图5-6为三个可折展三棱柱结构与三个镜像三棱柱结构的二维组合,图5-7至图5-10分别为二维组合结构的棱柱状态、展开中间状态、完全展开状态和完全折叠状态。图5-11为六个可折展三棱柱结构与六个镜像结构的三维组合连接示意图,图5-12至图5-15分别为三维组合结构的棱柱状态、展开中间状态、完全展开状态和完全折叠状态。
30.图6-1为实施例二可折展四棱柱结构的展开状态结构示意图,图6-2至图6-5为实施例二可折展四棱柱结构的顺序展开与折叠的示意图。
31.图7-1为实施例二可折展四棱柱结构的镜像结构展开状态结构示意图,图7-2至图7-5为实施例二可折展四棱柱结构的镜像结构的顺序展开与折叠的示意图。
32.图8-1为可折展四棱柱组合结构中两个四棱柱结构的组合连接示意图,图8-2为组合结构的棱柱状态,图8-3为组合结构的展开中间状态,图8-4为组合结构的完全展开状态,图8-5为组合结构的完全折叠状态。
33.图9-1为一个可折展四棱柱结构与其一个镜像结构的组合连接示意图,图9-2为组合结构的棱柱状态,图9-3为组合结构的展开中间状态,图9-4为组合结构的完全展开状态,图9-5为组合结构的完全折叠状态。图9-6为两个可折展四棱柱结构与两个镜像四棱柱结构的二维组合连接示意图,图9-7至图9-10分别为二维组合结构的棱柱状态、展开中间状态、完全展开状态和完全折叠状态。图9-11为四个可折展四棱柱结构与其四个镜像结构的三维组合连接示意图,图9-12至图9-15分别为三维组合结构的棱柱状态、展开中间状态、完全展开状态和完全折叠状态。
34.图10-1为实施例三可折展五棱柱结构的展开状态结构示意图,图10-2至图10-5为实施例三可折展五棱柱结构的顺序展开与折叠的示意图。
35.图11-1为实施例三可折展五棱柱结构的镜像结构展开状态结构示意图,图11-2至图11-5为实施例三可折展五棱柱结构的镜像结构的顺序展开与折叠的示意图。
36.图12-1为可折展五棱柱组合结构中两个五棱柱结构的组合连接示意图,图12-2为组合结构的棱柱状态,图12-3为组合结构的展开中间状态,图12-4为组合结构的完全展开状态,图12-5为组合结构的完全折叠状态。
37.图13-1为一个可折展五棱柱结构与其一个镜像结构的组合连接示意图,图13-2为
组合结构的棱柱状态,图13-3为组合结构的展开中间状态,图13-4为组合结构的完全展开状态,图13-5为组合结构的完全折叠状态。
38.图14-1为实施例四可折展六棱柱结构的展开状态结构示意图,图14-2至图14-5为实施例四可折展六棱柱结构的顺序展开与折叠的示意图。
39.图15-1为实施例四可折展六棱柱结构的镜像结构展开状态结构示意图,图15-2至图15-5为实施例四可折展六棱柱结构的镜像结构的顺序展开与折叠的示意图。
40.图16-1为可折展六棱柱组合结构中两个六棱柱结构的组合连接示意图,图16-2为组合结构的棱柱状态,图16-3为组合结构的展开中间状态,图16-4为组合结构的完全展开状态,图16-5为组合结构的完全折叠状态。
41.图17-1为一个可折展六棱柱结构与其一个镜像结构的组合连接示意图,图17-2为组合结构的棱柱状态,图17-3为组合结构的展开中间状态,图17-4为组合结构的完全展开状态,图17-5为组合结构的完全折叠状态。图17-6为两个可折展六棱柱结构与两个镜像六棱柱结构的二维组合连接示意图,图17-7至图17-10分别为二维组合结构的棱柱状态、展开中间状态、完全展开状态和完全折叠状态。图17-11为四个可折展六棱柱结构与其四个镜像六棱柱结构的三维组合连接示意图,图17-12至图17-15分别为三维组合结构的棱柱状态、展开中间状态、完全展开状态和完全折叠状态。
具体实施方式
42.以下结合附图和具体实施例对本发明作进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
43.实施例一:
44.图1-1是本发明中可折展棱柱结构的模块展开图案,该图案由直角边长为a、b的四个全等三角形组成,四个全等三角形的第一面、第二面、第三面和第四面分别为a1、a2、a3和a4;第一面a1与第二面a2相邻并通过第一转动副l1相互连接,第二面a2与第三面a3相邻并通过第二转动副l2相互连接,第三面a3与第四面a4相邻并通过第三转动副l3相互连接,绕实线转动副中心线朝外折叠形成凸起的形状,形成模块的折叠形状如图1-2所示,以此形成可折展棱柱结构的模块。对该模块进行镜像操作,以此形成可折展棱柱结构的镜像模块,模块的形状如图1-3所示,镜像模块的面与转动副均不发生变化,所有实线转动副沿相反方向折叠。其中a,b表示模块中直角三角形的直角边长度。
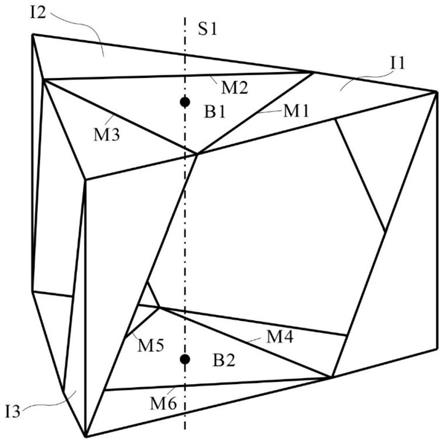
45.如图2-1所示,本实施例提供了一种具有旋转运动的可折展三棱柱的展开状态结构,包括顶面b1、底面b2和三个模块i1、i2、i3。顶面b1和底面b2为全等正三角形,三个模块i1、i2、i3的结构参数相同。
46.顶面b1、底面b2平行布置,分别作为可折展棱柱结构的上下底面;顶面b1与模块i1的第一面相邻并通过模块i1的上边转动副一m1相互连接,按逆时针顺序,顶面b1与模块i2的第一面相邻并通过模块i2的上边转动副二m2相互连接,顶面b1与模块i3的第一面相邻并通过模块i2的上边转动副三m3相互连接;底面b2与模块i1的第四面相邻并通过模块i1的下边转动副四m4相互连接,按逆时针顺序,底面b2与模块i2的第四面相邻并通过模块i2的下边转动副五m5相互连接,底面b2与模块i3的第四面相邻并通过模块i3的下边转动副六m6相互连接,以此形成可折展的三棱柱结构。
47.按照上述可折展三棱柱结构顶面、底面和模块的布置和连接方式,图2-2至图2-5为可折展三棱柱结构的顺序展开与折叠过程。图2-2为可折展三棱柱结构的棱柱状态,图2-3为展开中间状态,图2-4为完全展开状态,图2-5为完全折叠状态。
48.其中,上述可折展三棱柱结构在展开与折叠过程中,顶面b1、底面b2保持平行且几何中心位于中轴线s1上时,顶面b1在空间上会绕中轴线s1作相对于底面b2的逆时针旋转运动;顶面的几何中心沿中轴线s1作相对于底面b2的直线运动;模块i1、i2、i3在空间上关于中轴线s1呈旋转对称分布。
49.通过镜像操作图2-1中的可折展三棱柱结构,形成如图3-1所示的镜像可折展三棱柱结构。镜像可折展三棱柱结构的面、模块与转动副均不发生变化,在展开与折叠过程中,顶面b1、底面b2保持平行且几何中心位于中轴线s1上时,顶面b1在空间上会绕中轴线s1作相对于底面b2的顺时针旋转运动;顶面的几何中心沿中轴线s1作相对于底面b2的直线运动;模块i1、i2、i3在空间上关于中轴线s1呈旋转对称分布。图3-2为镜像可折展三棱柱结构的棱柱状态,图3-3为展开中间状态,图3-4为完全展开状态,图3-5为完全折叠状态。
50.如图4-1所示,上述可折展三棱柱结构可以通过中间正三角形面b3进行两个可折展三棱柱结构的组合,以构造具有更大折展比的可折展棱柱结构。其中,可折展三棱柱结构t1省掉自身的顶面b1,可折展三棱柱结构t2省掉自身的底面b2;接着,可折展三棱柱结构t1、正三角形面b3和可折展三棱柱结构t2通过可折展三棱柱组合结构转动副七m7、转动副八m8、转动副九m9相互连接。按照图4-1所示的可折展三棱柱结构的组合方式,图4-2至图4-5示出了组合结构的展开与折叠过程。图4-2为可折展三棱柱组合结构的棱柱状态,图4-3为组合结构的展开中间状态,图4-4为组合结构的完全展开状态,图4-5为组合结构的完全折叠状态。
51.如图5-1所示,可折展三棱柱结构t3与其镜像可折展三棱柱结构t4可以通过中间正三角形面b4进行组合,以构造具有更大折展比的可折展棱柱结构。可折展三棱柱结构t3省掉自身的顶面b1,可折展三棱柱结构t4省掉自身的底面b2;接着,可折展三棱柱结构t3、正三角形面b4和可折展三棱柱结构t4通过可折展三棱柱组合结构转动副十m10、转动副十一m11、转动副十二m12相互连接。按照图5-1所示的可折展三棱柱结构的组合方式,图5-2至图5-5示出了混合组合结构的展开与折叠过程。图5-2为混合可折展三棱柱组合结构的棱柱状态,图5-3为组合结构的展开中间状态,图5-4为组合结构的完全展开状态,图5-5为组合结构的完全折叠状态。
52.如图5-6所示,三个可折展三棱柱结构t5、t7、t9和三个镜像可折展三棱柱结构t6、t8、t10,分别通过对应可折展三棱柱组合结构转动副十三m13、转动副十四m14、转动副十五m15、转动副十六m16、转动副十七m17、转动副十八m18相互连接形成闭环结构;接着,根据连接的转动副,共用相邻两个三棱柱结构的侧面,使得面b5与b6、b7与b8、b9与b10、b11与b12、b13与b14、b15与b16在对应连接的转动副位置形成剪叉机构。按照图5-6所示的可折展三棱柱结构的组合方式,图5-7至图5-10示出了可折展三棱柱二维组合结构的展开与折叠过程。图5-7为可折展三棱柱二维组合结构的棱柱状态,图5-8为组合结构的展开中间状态,图5-9为组合结构的完全展开状态,图5-10为组合结构的完全折叠状态。
53.如图5-11所示,六个可折展三棱柱结构t11、t13、t15、t18、t20、t22和六个镜像可折展三棱柱结构t12、t14、t16、t17、t19、t21,分别通过对应可折展三棱柱组合结构转动副
十九m19,转动副二十m20,转动副二十一m21,转动副二十二m22,转动副二十三m23,转动副二十四m24,转动副二十五m25,转动副二十六m26,转动副二十七m27,转动副二十八m28,转动副二十九m29,转动副三十m30相互连接;接着,根据连接的转动副,共用相邻两个三棱柱结构的侧面,使得面b17与b18、b19与b20、b21与b22、b23与b24、b25与b26、b27与b28、b29与b30、b31与b32、b33与b34、b35与b36、b37与b38、b39与b40在对应连接的转动副位置形成剪叉机构。按照图5-11所示的可折展三棱柱结构的组合方式,图5-12至图5-15示出了可折展三棱柱三维组合结构的展开与折叠过程。图5-12为可折展三棱柱三维组合结构的棱柱状态,图5-13为组合结构的展开中间状态,图5-14为组合结构的完全展开状态,图5-15为组合结构的完全折叠状态。
54.除上述四种可折展三棱柱组合结构外,利用相同的连接方式,两个镜像可折展三棱柱结构可以形成镜像可折展三棱柱组合结构;此外,可以将多个可折展三棱柱结构或其镜像结构,通过上述相同的连接方式得到规模更大的可折展三棱柱组合结构。
55.可见,上述可折展三棱柱结构只要满足上述约束条件及转动副的连接方式,即可达到本发明要求的折展效果。其中,各面的尺寸可根据实际应用要求做一定的改变。本发明的可折展三棱柱结构的折展比大,可将三棱柱结构展开并完全折平,便于储存和运输;可折展三棱柱结构简单,便于加工制造与批量化生产,在收纳、包装、土木、建筑、航空航天等领域中具有重要的意义和广阔的应用前景。可折展三棱柱结构进行镜像操作后得到旋转方向相反的镜像可折展棱柱结构,在手性材料的设计中有潜在的应用前景。
56.实施例二:
57.如图6-1所示,本实施例提供了一种具有旋转运动的可折展四棱柱的展开状态结构,包括顶面c1、底面c2和四个模块ii1、ii2、ii3、ii4。顶面c1和底面c2为全等正方形,四个模块ii1、ii2、ii3、ii4的结构参数相同。
58.顶面c1、底面c2平行布置,分别作为可折展棱柱结构的上下底面;顶面c1与模块ii1的第一面相邻并通过模块ii1的上边转动副一n1相互连接,按逆时针顺序,顶面c1与模块ii2的第一面相邻并通过模块ii2的上边转动副二n2相互连接,顶面c1与模块ii3的第一面相邻并通过模块ii3的上边转动副三n3相互连接,顶面c1与模块ii4的第一面相邻并通过模块ii4的上边转动副四n4相互连接;底面c2与模块ii1的第四面相邻并通过模块ii1的下边转动副五n5相互连接,按逆时针顺序,底面c2与模块ii2的第四面相邻并通过模块ii2的下边转动副六n6相互连接,底面c2与模块ii3的第四面相邻并通过模块ii3的下边转动副七n7相互连接,底面c2与模块ii4的第四面相邻并通过模块ii4的下边转动副八n8相互连接,以此形成可折展的四棱柱结构。按照上述可折展四棱柱结构顶面、底面和模块的布置和连接方式,图6-2至图6-5为可折展四棱柱结构的顺序展开与折叠过程。图6-2为可折展四棱柱结构的棱柱状态,图6-3为展开中间状态,图6-4为完全展开状态,图6-5为完全折叠状态。
59.其中,上述可折展四棱柱结构在展开与折叠过程中,顶面c1、底面c2保持平行且几何中心位于中轴线s2上时,顶面c1在空间上会绕中轴线s2作相对于底面c2的逆时针旋转运动;顶面的几何中心沿中轴线s2作相对于底面c2的直线运动;模块ii1、ii2、ii3、ii4在空间上关于中轴线s2呈旋转对称分布。
60.通过镜像操作图6-1中的可折展四棱柱结构,形成如图7-1所示的镜像可折展四棱柱结构。镜像可折展四棱柱结构的面、模块与转动副均不发生变化,在展开与折叠过程中,
顶面c1、底面c2保持平行且几何中心位于中轴线s2上时,顶面c1在空间上会绕中轴线s2作相对于底面c2的顺时针旋转运动;顶面的几何中心沿中轴线s2作相对于底面c2的直线运动;模块ii1、ii2、ii3、ii4在空间上关于中轴线s2呈旋转对称分布。图7-2为镜像可折展四棱柱结构的棱柱状态,图7-3为展开中间状态,图7-4为完全展开状态,图7-5为完全折叠状态。
61.如图8-1所示,上述可折展四棱柱结构可以通过中间正方形面c3进行两个可折展四棱柱结构的组合,以构造具有更大折展比的可折展棱柱结构。其中,可折展四棱柱结构u1省掉自身的顶面c1,可折展四棱柱结构u2省掉自身的底面c2;接着,可折展四棱柱结构u1、正方形面c3和可折展四棱柱结构u2通过可折展四棱柱组合结构转动副九n9、转动副十n10、转动副十一n11、转动副十二n12相互连接。按照图8-1所示的可折展四棱柱结构的组合方式,图8-2至图8-5示出了组合结构的展开与折叠过程。图8-2为可折展四棱柱组合结构的棱柱状态,图8-3为组合结构的展开中间状态,图8-4为组合结构的完全展开状态,图8-5为组合结构的完全折叠状态。
62.如图9-1所示,可折展四棱柱结构u3与其镜像可折展四棱柱结构u4可以通过中间正方形面c4进行组合,以构造具有更大折展比的可折展棱柱结构。可折展四棱柱结构u3省掉自身的顶面c1,可折展四棱柱结构u4省掉自身的底面c2;接着,可折展四棱柱结构u3、正方形面c4和可折展四棱柱结构u4通过可折展四棱柱组合结构转动副十三n13、转动副十四n14、转动副十五n15、转动副十六n16相互连接。按照图9-1所示的可折展四棱柱结构的组合方式,图9-2至图9-5示出了混合组合结构的展开与折叠过程。图9-2为混合可折展四棱柱组合结构的棱柱状态,图9-3为组合结构的展开中间状态,图9-4为组合结构的完全展开状态,图9-5为组合结构的完全折叠状态。
63.如图9-6所示,两个可折展四棱柱结构u5、u7和两个镜像可折展四棱柱结构u6、u8,分别通过对应可折展四棱柱组合结构转动副十七n17、转动副十八n18、转动副十九n19、转动副二十n20相互连接形成闭环结构;接着,根据连接的转动副,共用相邻两个四棱柱结构的侧面,使得面c5与c6、c7与c8、c9与c10、c11与c12在对应连接的转动副位置形成剪叉机构。按照图9-6所示的可折展四棱柱结构的组合方式,图9-7至图9-10示出了可折展四棱柱二维组合结构的展开与折叠过程。图9-7为可折展四棱柱二维组合结构的棱柱状态,图9-8为组合结构的展开中间状态,图9-9为组合结构的完全展开状态,图9-10为组合结构的完全折叠状态。
64.如图9-11所示,四个可折展四棱柱结构u9、u11、u14、u16和四个镜像可折展四棱柱结构u10、u12、u13、u15,分别通过对应可折展四棱柱组合结构转动副二十一n21,转动副二十二n22,转动副二十三n23,转动副二十四n24,转动副二十五n25,转动副二十六n26,转动副二十七n27,转动副二十八n28相互连接;接着,根据连接的转动副,共用相邻两个四棱柱结构的侧面,使得面c13与c14、c15与c16、c17与c18、c19与c20、c21与c22、c23与c24、c25与c26、c27与c28在对应连接的转动副位置形成剪叉机构。按照图9-11所示的可折展四棱柱结构的组合方式,图9-12至图9-15示出了可折展四棱柱三维组合结构的展开与折叠过程。图9-12为可折展四棱柱三维组合结构的棱柱状态,图9-13为组合结构的展开中间状态,图9-14为组合结构的完全展开状态,图9-15为组合结构的完全折叠状态。除上述四种可折展四棱柱组合结构外,利用相同的连接方式,两个镜像可折展四棱柱结构可以形成镜像可折展
四棱柱组合结构;此外,可以将多个可折展四棱柱结构或其镜像结构,通过上述相同的连接方式得到规模更大的可折展四棱柱组合结构。可见,上述可折展四棱柱结构只要满足上述约束条件及转动副的连接方式,即可达到本发明要求的折展效果。其中,各面的尺寸可根据实际应用要求做一定的改变。本发明的可折展四棱柱结构的折展比大,可将四棱柱结构展开并完全折平,便于储存和运输;可折展四棱柱结构简单,便于加工制造与批量化生产,在收纳、包装、土木、建筑、航空航天等领域中具有重要的意义和广阔的应用前景。可折展四棱柱结构进行镜像操作后得到旋转方向相反的镜像可折展棱柱结构,在手性材料的设计中有潜在的应用前景。
65.实施例三:
66.如图10-1所示,本实施例提供了一种具有旋转运动的可折展五棱柱的展开状态结构,包括顶面d1、底面d2和五个模块iii1、iii2、iii3、iii4、iii5。顶面d1和底面d2为全等正五边形,五个模块iii1、iii2、iii3、iii4、iii5的结构参数相同。
67.顶面d1、底面d2平行布置,分别作为可折展棱柱结构的上下底面;顶面d1与模块iii1的第一面相邻并通过模块iii1的上边转动副一o1相互连接,按逆时针顺序,顶面d1与模块iii2的第一面相邻并通过模块iii2的上边转动副二o2相互连接,顶面d1与模块iii3的第一面相邻并通过模块iii3的上边转动副三o3相互连接,顶面d1与模块iii4的第一面相邻并通过模块iii4的上边转动副四o4相互连接,顶面d1与模块iii5的第一面相邻并通过模块iii5的上边转动副五o5相互连接;底面d2与模块iii1的第四面相邻并通过模块iii1的下边转动副六o6相互连接,按逆时针顺序,底面d2与模块iii2的第四面相邻并通过模块iii2的下边转动副七o7相互连接,底面d2与模块iii3的第四面相邻并通过模块iii3的下边转动副八o8相互连接,底面d2与模块iii4的第四面相邻并通过模块iii4的下边转动副九o9相互连接,底面d2与模块iii5的第四面相邻并通过模块iii5的下边转动副十o10相互连接,以此形成可折展的五棱柱结构。
68.按照上述可折展五棱柱结构顶面、底面和模块的布置和连接方式,图10-2至图10-5为可折展五棱柱结构的顺序展开与折叠过程。图10-2为可折展五棱柱结构的棱柱状态,图10-3为展开中间状态,图10-4为完全展开状态,图10-5为完全折叠状态。
69.其中,上述可折展五棱柱结构在展开与折叠过程中,顶面d1、底面d2保持平行且几何中心位于中轴线s3上时,顶面d1在空间上会绕中轴线s3作相对于底面d2的逆时针旋转运动;顶面的几何中心沿中轴线s3作相对于底面d2的直线运动;模块iii1、iii2、iii3、iii4、iii5在空间上关于中轴线s3呈旋转对称分布。
70.通过镜像操作图10-1中的可折展五棱柱结构,形成如图11-1所示的镜像可折展五棱柱结构。镜像可折展五棱柱结构的面、模块与转动副均不发生变化,在展开与折叠过程中,顶面d1、底面d2保持平行且几何中心位于中轴线s3上时,顶面d1在空间上会绕中轴线s3作相对于底面d2的顺时针旋转运动;顶面的几何中心沿中轴线s3作相对于底面d2的直线运动;模块iii1、iii2、iii3、iii4、iii5在空间上关于中轴线s3呈旋转对称分布。图11-2为镜像可折展五棱柱结构的棱柱状态,图11-3为展开中间状态,图11-4为完全展开状态,图11-5为完全折叠状态。
71.如图12-1所示,上述可折展五棱柱结构可以通过中间正五边形面d3进行两个可折展五棱柱结构的组合,以构造具有更大折展比的可折展棱柱结构。其中,可折展五棱柱结构
v1省掉自身的顶面d1,可折展五棱柱结构v2省掉自身的底面d2;接着,可折展五棱柱结构v1、正五边形面d3和可折展五棱柱结构v2通过可折展五棱柱组合结构转动副十一o11、转动副十二o12、转动副十三o13、转动副十四o14、转动副十五o15相互连接。按照图12-1所示的可折展五棱柱结构的组合方式,图12-2至图12-5示出了组合结构的展开与折叠过程。图12-2为可折展五棱柱组合结构的棱柱状态,图12-3为组合结构的展开中间状态,图12-4为组合结构的完全展开状态,图12-5为组合结构的完全折叠状态。
72.如图13-1所示,可折展五棱柱结构v3与其镜像可折展五棱柱结构v4可以通过中间正五边形面d4进行组合,以构造具有更大折展比的可折展棱柱结构。可折展五棱柱结构v3省掉自身的顶面d1,可折展五棱柱结构v4省掉自身的底面d2;接着,可折展五棱柱结构v3、正五边形面d4和可折展五棱柱结构v4通过可折展五棱柱组合结构转动副十六o16、转动副十七o17、转动副十八o18、转动副十九o19、转动副二十o20相互连接。按照图13-1所示的可折展五棱柱结构的组合方式,图13-2至图13-5示出了混合组合结构的展开与折叠过程。图13-2为可折展五棱柱组合结构的棱柱状态,图13-3为组合结构的展开中间状态,图13-4为组合结构的完全展开状态,图13-5为组合结构的完全折叠状态。除上述两种可折展五棱柱组合结构外,利用相同的连接方式,两个镜像可折展五棱柱结构可以形成镜像可折展五棱柱组合结构;此外,可以将多个可折展五棱柱结构或其镜像结构,通过上述相同的连接方式得到规模更大的可折展五棱柱组合结构。可见,上述可折展五棱柱结构只要满足上述约束条件及转动副的连接方式,即可达到本发明要求的折展效果。其中,各面的尺寸可根据实际应用要求做一定的改变。本发明的可折展五棱柱结构的折展比大,可将五棱柱结构展开并完全折平,便于储存和运输;可折展五棱柱结构简单,便于加工制造与批量化生产,在收纳、包装、土木、建筑、航空航天等领域中具有重要的意义和广阔的应用前景。可折展五棱柱结构进行镜像操作后得到旋转方向相反的镜像可折展棱柱结构,在手性材料的设计中有潜在的应用前景。
73.实施例四:
74.如图14-1所示,本实施例提供了一种具有旋转运动的可折展六棱柱的展开状态结构,包括顶面e1、底面e2和六个模块iv1、iv2、iv3、iv4、iv5、iv6。顶面e1和底面e2为全等正六边形,六个模块iv1、iv2、iv3、iv4、iv5、iv6的结构参数相同。
75.顶面e1、底面e2平行布置,分别作为可折展棱柱结构的上下底面;顶面e1与模块iv1的第一面相邻并通过模块iv1的上边转动副一p1相互连接,按逆时针顺序,顶面e1与模块iv2的第一面相邻并通过模块iv2的上边转动副二p2相互连接,顶面e1与模块iv3的第一面相邻并通过模块iv3的上边转动副三p3相互连接,顶面e1与模块iv4的第一面相邻并通过模块iv4的上边转动副四p4相互连接,顶面e1与模块iv5的第一面相邻并通过模块iv5的上边转动副五p5相互连接,顶面e1与模块iv6的第一面相邻并通过模块iv6的上边转动副六p6相互连接;底面e2与模块iv1的第四面相邻并通过模块iv1的下边转动副七p7相互连接,按逆时针顺序,底面e2与模块iv2的第四面相邻并通过模块iv2的下边转动副八p8相互连接,底面e2与模块iv3的第四面相邻并通过模块iv3的下边转动副九p9相互连接,底面e2与模块iv4的第四面相邻并通过模块iv4的下边转动副十p10相互连接,底面e2与模块iv5的第四面相邻并通过模块iv5的下边转动副十一p11相互连接,底面e2与模块iv6的第四面相邻并通过模块iv6的下边转动副十二p12相互连接,以此形成可折展的六棱柱结构。
76.按照上述可折展六棱柱结构顶面、底面和模块的布置和连接方式,图14-2至图14-5为可折展六棱柱结构的顺序展开与折叠过程。图14-2为可折展六棱柱结构的棱柱状态,图14-3为展开中间状态,图14-4为完全展开状态,图14-5为完全折叠状态。
77.其中,上述可折展六棱柱结构在展开与折叠过程中,顶面e1、底面e2保持平行且几何中心位于中轴线s4上时,顶面e1在空间上会绕中轴线s4作相对于底面e2的逆时针旋转运动;顶面的几何中心沿中轴线s4作相对于底面e2的直线运动;模块iv1、iv2、iv3、iv4、iv5、iv6在空间上关于中轴线s4呈旋转对称分布。
78.通过镜像操作图14-1中的可折展六棱柱结构,形成如图15-1所示的镜像可折展六棱柱结构。镜像可折展六棱柱结构的面、模块与转动副均不发生变化,在展开与折叠过程中,顶面e1、底面e2保持平行且几何中心位于中轴线s4上时,顶面e1在空间上会绕中轴线s4作相对于底面e2的顺时针旋转运动;顶面的几何中心沿中轴线s4作相对于底面e2的直线运动;模块iv1、iv2、iv3、iv4、iv5、iv6在空间上关于中轴线s4呈旋转对称分布。图15-2为镜像可折展六棱柱结构的棱柱状态,图15-3为展开中间状态,图15-4为完全展开状态,图15-5为完全折叠状态。
79.如图16-1所示,上述可折展六棱柱结构可以通过中间正六边形面e3进行两个可折展六棱柱结构的组合,以构造具有更大折展比的可折展棱柱结构。其中,可折展六棱柱结构w1省掉自身的顶面e1,可折展六棱柱结构w2省掉自身的底面e2;接着,可折展六棱柱结构w1、正六边形面e3和可折展六棱柱结构w2通过可折展六棱柱组合结构转动副十三p13、转动副十四p14、转动副十五p15、转动副十六p16、转动副十七p17、转动副十八p18相互连接。按照图16-1所示的可折展六棱柱结构的组合方式,图16-2至图16-5示出了组合结构的展开与折叠过程。图16-2为可折展六棱柱组合结构的棱柱状态,图16-3为组合结构的展开中间状态,图16-4为组合结构的完全展开状态,图16-5为组合结构的完全折叠状态。
80.如图17-1所示,可折展六棱柱结构w3与其镜像可折展六棱柱结构w4可以通过中间正六边形面e4进行组合,以构造具有更大折展比的可折展棱柱结构。可折展六棱柱结构w3省掉自身的顶面e1,可折展六棱柱结构w4省掉自身的底面e2;接着,可折展六棱柱结构w3、正六边形面e4和可折展六棱柱结构w4通过可折展六棱柱组合结构转动副十九p19、转动副二十p20、转动副二十一p21、转动副二十二p22、转动副二十三p23、转动副二十四p24相互连接。按照图17-1所示的可折展六棱柱结构的组合方式,图17-2至图17-5示出了混合组合结构的展开与折叠过程。图17-2为可折展六棱柱组合结构的棱柱状态,图17-3为组合结构的展开中间状态,图17-4为组合结构的完全展开状态,图17-5为组合结构的完全折叠状态。
81.如图17-6所示,两个可折展六棱柱结构w5、w7和两个镜像可折展六棱柱结构w6、w8,分别通过对应可折展六棱柱组合结构转动副二十五p25、转动副二十六p26、转动副二十七p27、转动副二十八p28相互连接形成闭环结构;接着,根据连接的转动副,共用相邻两个六棱柱结构的侧面,使得面e5与e6、e7与e8、e9与e10、e11与e12在对应连接的转动副位置形成剪叉机构。按照图17-6所示的可折展六棱柱结构的组合方式,图17-7至图17-10示出了可折展六棱柱二维组合结构的展开与折叠过程。图17-7为可折展六棱柱二维组合结构的棱柱状态,图17-8为组合结构的展开中间状态,图17-9为组合结构的完全展开状态,图17-10为组合结构的完全折叠状态。
82.如图17-11所示,四个可折展六棱柱结构w9、w11、w14、w16和四个镜像可折展六棱
柱结构w10、w12、w13、w15,分别通过对应可折展六棱柱组合结构转动副二十九p29、转动副三十p30、转动副三十一p31、转动副三十二p32、转动副三十三p33、转动副三十四p34、转动副三十五p35、转动副三十六p36相互连接;接着,根据连接的转动副,共用相邻两个六棱柱结构的侧面,使得面e13与e14、e15与e16、e17与e18、e19与e20、e21与e22、e23与e24、e25与e26、e27与e28在对应连接的转动副位置形成剪叉机构。按照图17-11所示的可折展六棱柱结构的组合方式,图17-12至图17-15示出了可折展六棱柱三维组合结构的展开与折叠过程。图17-12为可折展六棱柱三维组合结构的棱柱状态,图17-13为组合结构的展开中间状态,图17-14为组合结构的完全展开状态,图17-15为组合结构的完全折叠状态。除上述四种可折展六棱柱组合结构外,利用相同的连接方式,两个镜像可折展六棱柱结构可以形成镜像可折展六棱柱组合结构;此外,可以将多个可折展六棱柱结构或其镜像结构,通过上述相同的连接方式得到规模更大的可折展六棱柱组合结构。可见,上述可折展六棱柱结构只要满足上述约束条件及转动副的连接方式,即可达到本发明要求的折展效果。其中,各面的尺寸可根据实际应用要求做一定的改变。本发明的可折展六棱柱结构的折展比大,可将六棱柱结构展开并完全折平,便于储存和运输;可折展六棱柱结构简单,便于加工制造与批量化生产,在收纳、包装、土木、建筑、航空航天等领域中具有重要的意义和广阔的应用前景。可折展六棱柱结构进行镜像操作后得到旋转方向相反的镜像可折展棱柱结构,在手性材料的设计中有潜在的应用前景。
83.本发明并不限于上文描述的实施方式。以上对具体实施方式的描述旨在描述和说明本发明的技术方案,上述的具体实施方式仅仅是示意性的,并不是限制性的。在不脱离本发明宗旨和权利要求所保护的范围情况下,本领域的普通技术人员在本发明的启示下还可做出很多形式的具体变换,这些均属于本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。