1.公开的实施方式涉及植物分离装置、植物栽培系统以及植物分离方法。
背景技术:
2.例如在专利文献1中记载了一种植物栽培系统,其通过用保持器具保持作为栽培对象的植物,并使该保持器具在规定的期间沿着轨道移动,从而使植物生长。在该植物栽培系统中,向形成于植物保持器具的孔部填充培养基而播种植物的种子,并使其生长。
3.现有技术文献
4.专利文献
5.专利文献1:国际公开第2017/042891号
6.在上述现有技术的植物栽培系统中,为了再利用保持器具,期望将收获生长的植物后残留的残留部分从保持器具适当地分离。
技术实现要素:
7.本发明是鉴于这样的问题点而完成的,其目的在于提供植物分离装置、植物栽培系统及植物分离方法,能够将收获生长的植物后残留的残留部分从保持器具适当地分离。
8.为了解决上述课题,根据本发明的一个观点,应用植物分离装置,该植物分离装置具有:保持器具,其具备贯通的孔部,在该孔部保持作为栽培对象的植物,支承部件,其将所述保持器具支承为能够移动;第一分离装置,其相对于被所述支承部件支承的所述保持器具的所述孔部,使推压收获后的所述植物的残留部分的第一推压部件从所述孔部的贯通方向上的一侧朝向另一侧贯穿插入;以及第二分离装置,其在被所述支承部件支承的所述保持器具的所述另一方侧,使推压所述残留部分的第二推压部件在与所述贯通方向交叉的方向上动作。
9.另外,根据本发明的另一观点,应用植物栽培系统,该植物栽培系统具有:保持器具,其具备贯通的孔部,在该孔部保持作为栽培对象的植物;栽培搁板,其通过使所述保持器具在规定的期间移动而使所述植物生长;以及所述植物分离装置。
10.另外,根据本发明的另一观点,应用植物分离方法,所述植物分离方法具备如下工序:相对于具备贯通的孔部且在该孔部保持作为栽培对象的植物的保持器具的所述孔部,使推压收获后的所述植物的残留部分的第一推压部件从所述孔部的贯通方向的一侧朝向另一侧贯穿插入;以及在所述保持器具的所述另一侧,使推压所述残留部分的第二推压部件在与所述贯通方向交叉的方向上动作。
11.发明效果
12.根据本发明,能够将收获生长的植物后残留的残留部分从保持器具适当地分离。
附图说明
13.图1是表示实施方式的植物栽培系统的整体结构的示意图。
14.图2是表示栽培搁板的构造的一例的立体图。
15.图3是表示栽培搁板的各搁板部上的轨道的配置的一例的说明图。
16.图4是表示栽培搁板的各搁板部上的光源的配置的一例的说明图。
17.图5是表示搬运机器人的结构的一例的立体图。
18.图6是表示支承保持器具的状态下的轨道的构造的一例的横剖视图。
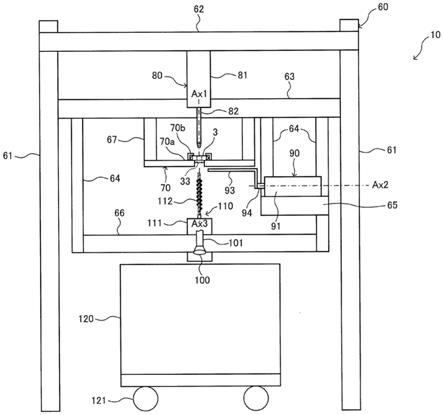
19.图7是表示植物分离装置的整体结构的一例的侧视图。
20.图8是表示植物分离装置的整体结构的一例的主视图。
21.图9是表示第二分离装置的结构的一例的俯视图。
22.图10是表示第二分离装置的结构的一例的侧视图。
23.图11是表示由植物分离装置执行的植物分离工序的一例的说明图。
24.图12是表示利用空气喷嘴进行的空气喷出动作的一例的植物分离装置的侧视图。
25.标号说明
26.1植物栽培系统
27.2植物
28.2a茎部
29.2c根部
30.2a、2c残留部分
31.3保持器具
32.5栽培搁板
33.10植物分离装置
34.33孔部
35.70轨道(支承部件)
36.80第一分离装置
37.82杆(第一推压部件)
38.90第二分离装置
39.93梳齿(第二推压部件)
40.93a凸部(凹凸部)
41.93b凸部(凹凸部)
42.93c凹部(凹凸部)
43.100空气喷嘴(空气喷出装置)
44.110清扫装置
45.112刷子(清扫器具)
46.120集装箱(容器)
具体实施方式
47.以下,参照附图对一个实施方式进行说明。另外,以下,为了便于说明植物栽培系统的结构,有时将各图中所示的上下左右前后等方向共同定义并适当使用。但是,并不限定植物栽培系统的各结构的位置关系。
48.<1.植物栽培系统的结构>
49.参照图1至图4,对本实施方式的植物栽培系统1的整体结构的一例进行说明。此外,在图1中,关于各部分的详细构造,省略图示,示意性地示出系统整体的结构。
50.如图1至图4所示,植物栽培系统1是如下系统:利用保持器具3对作为栽培对象的植物2进行保持,通过使该保持器具3在规定的期间内沿着轨道4移动而使植物2生长,并收获植物2中的商用部分(在本例中为后述的叶部2b),并且进行保持器具3的后处理。植物栽培系统1具有多个保持器具3、栽培搁板5、搬运机器人6、搬入输送机7、搬出输送机8、收获装置9以及植物分离装置10。
51.(1-1.栽培搁板)
52.在栽培搁板5上,以在上下方向上层叠多层的方式配置有多层(该例中为8层)搁板部5a。另外,“上下方向”不需要是严格的铅垂方向,只要是实质的铅垂方向即可。因此,“上下方向”也包括相对于铅垂方向稍微倾斜的方向。另外,搁板部5a在栽培搁板5中的层叠方向并不限定于上下方向,也可以设为相对于上下方向以规定的角度倾斜的方向。
53.在各搁板部5a,分别沿着前后方向水平地延伸设置有多个轨道4。另外,本实施方式中所说的“前后方向”是植物2在各搁板部5a上的流动方向(搬运方向),也是轨道4的长度方向或延伸设置方向。另外,“水平方向”不需要是严格的水平方向,只要是实质上的水平方向即可。因此,还包括相对于水平方向稍微倾斜的方向。多个轨道4在左右方向上并排设置于各搁板部5a,各轨道4实质上平行地配置。另外,在本实施方式中所说的“左右方向”是与上述上下方向以及前后方向正交的方向。
54.关于详细的构造在后面叙述,轨道4将多个保持器具3支承为能够沿长度方向移动。而且,轨道4构成为,通过从前后方向上的一侧被供给保持器具3,从而其他被支承的多个保持器具3朝向前后方向上的另一侧被顶推而滑动移动。
55.栽培搁板5中的搁板部5a的层数没有特别限定,但在本实施方式中例如以8层的情况为一例进行说明。以下,为了便于说明,对于栽培搁板5的搁板部5a的层,适当地将最下层的1层称为a层,将最上层的1层称为b层,将从上数第二层~第五层统称为c层,将从上数第六、七层统称为d层。即,如图2及图3所示,a层具有1个搁板部5a,b层具有1个搁板部5a,c层具有4个搁板部5a,d层具有2个搁板部5a。在图3所示的例子中,在a层的搁板部5a设置有数量比较多的(在图示的例子中为8个)轨道4。在b层的搁板部5a设置有比a层数量少的(在图示的例子中为6个)轨道4。在c层的搁板部5a分别设置有比b层数量更少的(在本例中为4个)轨道4。在d层的搁板部5a分别设置有比c层数量更少的(在本例中为3个)轨道4。
56.(1-2.搬运顺序)
57.接着,对保持器具3及植物2在植物栽培系统1中的搬运顺序的一例进行说明。在该例子中,搬入输送机7将对播种了种子而发芽的状态的植物2进行保持的保持器具3从未图示的码堆机向a层的后侧搬入并供给。另外,搬出输送机8从d层的各层的搁板部5a的后侧搬出保持有充分生长的状态的植物2的保持器具3。
58.图1及图3表示各搁板部5a各自的保持器具3及植物2的搬运方向。另外,图1中的虚线箭头表示保持器具3及植物2在各搁板部5a上的搬运方向。另外,图3中的符号sy1表示从上述前后方向上的前侧朝向后侧的保持器具3及植物2的搬运方向,符号sy2表示相反地从后侧朝向前侧的保持器具3及植物2的搬运方向。如图1、图3所示,在a层,在各轨道4上从后侧朝向前侧搬运保持器具3和植物2。在b层,在各轨道4上从前侧朝向后侧搬运保持器具3及
植物2。在c层,各层均在各轨道4上从后侧朝向前侧搬运保持器具3及植物2。在d层,各层均在各轨道4上从前侧朝向后侧搬运保持器具3及植物2。
59.位于栽培搁板5的前侧的搬运机器人6进行从a层朝向b层的保持器具3及植物2的上升搬运、以及从c层朝向d层的保持器具3及植物2的下降搬运。此时,前侧的搬运机器人6进行左右方向的分配,并且还进行处于不同层数的c层与d层之间的上下方向的分配。另外,位于栽培搁板5的后侧的搬运机器人6进行从搬入输送机7朝向a层的保持器具3和植物2的水平搬运、从b层朝向c层的保持器具3和植物2的下降搬运、以及从d层朝向后述的收获装置9及植物分离装置10的保持器具3和植物2的集中搬运。此时,后侧的搬运机器人6进行左右方向的分配,并且还进行处于不同层数的b层与c层之间的上下方向的分配。
60.另外,如图4所示,在栽培搁板5的搁板部5a的上方设置有用于向植物2的叶部2b(参照后述的图6)照射光的多个光源15。各光源15以沿左右方向延伸的方式设置在支承板11的下表面,所述支承板11分别设置于各搁板部5a的上方。各光源15沿着前后方向以规定的间隔配置。另外,光源15没有特别限定,但为了促进植物的光合作用,例如使用led或荧光灯等。
61.在以上的搬运路径中,随着按照a层
→
b层
→
c层
→
d层的顺序搬运,左右方向上的轨道间隔逐渐变宽。由此,能够在植物2整体的大小比保持器具3小的育苗阶段,在轨道间隔最窄的a层密集地栽培,然后,以轨道间隔阶段性地变宽的方式按照b层
→
c层
→
d层的顺序进行搬运。即,能够根据各植物2的整体逐渐长大的阶段来扩大配置间隔。其结果是,能够进行相对于该栽培搁板5整体的设置面积能够有效地利用植物2的栽培面积的所谓定植。
62.(1-3.其他结构)
63.如上所述,植物栽培系统1还具有收获装置9和植物分离装置10。
64.虽然省略了图示,但收获装置9例如具备切割器等切断机构,将保持于保持用具3的植物2的茎部2a(参照后述的图6)切断。由后侧的搬运机器人6从栽培搁板5的d层被搬运来保持具3的收获装置9针对被该保持具3保持而充分生长的植物2,仅将作为其商用部分的叶部2b切断而收获。另外,由收获装置9收获的叶部2b等商用部分由另外的移送机构(专用的移送机器人等,省略图示)向搬出输送机8移送,剩下的保持用具3由后方的搬运机器人6向植物分离装置10搬运。另外,收获作业也可以不必自动地进行,例如也可以由作业者通过手动作业来进行。
65.植物分离装置10将由上述收获装置9收获了叶部2b后残留的茎部2a和根部2c(参照后述的图6)从保持用具3分离,并且对保持用具3进行清洁。关于该植物分离装置10的结构和功能在后面叙述。
66.<2.搬运机器人>
67.接着,使用图5对搬运机器人6的结构的一例进行说明。另外,在图5中,以立体示出配置于栽培搁板5的前侧的搬运机器人6,x轴正方向对应于右,x轴负方向对应于左,y轴正方向对应于后,y轴负方向对应于前,z轴正方向对应于上,z轴负方向对应于下。另外,关于配置于栽培搁板5的后侧的搬运机器人6,由于仅是使相同结构的搬运机器人在x轴、y轴各自的正负方向上相反,因此省略图示。
68.搬运机器人6从轨道4的端部取出保持器3及植物2并进行搬运,且向另一轨道4的端部推入而进行供给。如图5所示,搬运机器人6具有基座16、设置于基座16上的门型的支承
框17、设置于支承框17的致动器30以及手21。
69.支承框17具有:一对支柱17a,它们以在x轴方向上对置的方式沿着z轴方向设置于基座16上;以及大致水平的横梁17b,其沿着x轴方向架设在一对支柱17a的上端。
70.致动器30具有x轴单元18、z轴单元19和y轴单元20。x轴单元18具有梁18a、滑动件18b和x轴马达18c。梁18a在x轴方向上大致水平地架设于一对支柱17a之间。滑动件18b沿着x轴方向移动自如地支承于梁18a。x轴马达18c例如安装于梁18a的左端,经由装配于滑动件18b的未图示的链条等在x轴方向上驱动滑动件18b。
71.z轴单元19具有梁19a、滑动件19b和z轴马达19c。梁19a的上端在x轴方向上移动自如地支承于横梁17b,并且梁19a被固定于滑动件18b。滑动件19b沿着z轴方向移动自如地支承于梁19a。z轴马达19c例如安装于梁19a的下端,经由装配于滑动件19b的未图示的链条等在z轴方向上驱动滑动件19b。
72.y轴单元20具有梁20a、滑动件20b和y轴马达20c。滑动件20b固定于滑动件19b。梁20a被滑动件20b支承为沿着y轴方向移动自如。y轴马达20c例如安装于梁20a的前端,经由装配于滑动件20b的未图示的链条等在y轴方向上驱动滑动件20b。
73.在致动器30中,当利用x轴马达18c在x轴方向上驱动滑动件18b时,梁19a在x轴方向上移动,梁20a经由滑动件19b和滑动件20b而在x轴方向上移动。此外,当利用z轴马达19c在z轴方向上驱动滑动件19b时,梁20a经由滑动件19b和滑动件20b而在z轴方向上移动。此外,当利用y轴马达20c在y轴方向上驱动滑动件20b时,梁20a经由滑动件20b而在y轴方向上移动。这样,致动器30能够使梁20a在x轴、y轴、z轴这三个轴方向上移动。
74.手21安装于致动器30的梁20a的后侧的末端,对保持器具3进行把持。致动器30使梁20a在三个轴方向上移动,由此能够使手21在三个轴方向上移动。即,致动器30使手21沿着前后方向(轨道4的长度方向)移动。此外,致动器30能够使手21沿着与前后方向垂直且相互正交的2个方向、即左右方向(轨道4的并排设置方向。也是大致水平方向)和上下方向(栽培搁板5a的层叠方向。也是高度方向)这2个方向移动。
75.例如在拔出位于轨道4的端部的保持器具3时,手21从两侧夹着保持器具3进行把持后将其拔出。另外,例如在向轨道4的端部插入保持器具3时,手21通过致动器30的驱动使所把持的保持器具3向另一轨道4的端部移动,将其插入轨道4中。然后,在把持着保持器具3的状态下在y轴方向(前后方向)推压1个间距量(保持器具3的前后方向的长度)。由此,能够使所插入的保持器具3和支承于轨道4上的多个保持器具3滑动1个间距量。这样,搬运机器人6使被支承在保持器具3的插入目的地的轨道4上的多个保持器具3的列整体在搬运方向上移动。在以上的插入操作之后,手21打开而解除对保持器具3的把持。
76.<3.保持器具、轨道>
77.接着,使用图6对保持器具3及轨道4的结构的一例进行说明。另外,图6所示的方向表示轨道4设置于搁板部5a的状态下的方向,图6表示前后方向上的轨道4的正交截面。
78.(3-1.保持器具)
79.保持器具3是按照每1株保持作为植物栽培系统1的栽培对象的植物2的部件。另外,这里所说的“1株”是指从单一的种子生长的1个个体。例如如图6所示的植物2那样,多个(也可以是单一)叶部2b被1个茎部2a支承而成为1个个体的植物是1株。另外,例如即使在茎因分支等而存在多个的情况下,由于其根部2c相连而成为1个个体的植物是1株。
80.保持器具3在左右方向、前后方向的各方向上分别具有对称的形状。因此,保持器具3具有在其长度方向即前后方向(也就是搬运方向)上能够在正反两个方向使用的方向互换性。保持器具3由滑动性高的材料(例如树脂。也可以是金属等)一体成型,构成为能够相对于支承保持器具3的轨道4滑动。
81.如图6所示,保持器具3具有主体部31、保持筒部32、孔部33以及引导板部34。主体部31形成为从上方俯视观察时以前后方向为长度方向的大致矩形形状。主体部31中的左右方向两侧的缘部作为在由搬运机器人6的手21把持时被支承的支承部35发挥功能。在图6所示的例子中,从前后方向观察,支承部35形成为等腰梯形,但也可以是三角形或圆形等其他形状。
82.保持筒部32形成于上述主体部31的前后方向和左右方向的中心位置,具有在上下方向上贯通的孔部33。保持筒部32的上端开口部不从主体部31的上表面突出而是以共面的状态形成,下端开口部形成为从主体部31的下表面向下方突出。在该例子中,保持筒部32例如是孔部33为圆孔的圆筒形状,但也可以是孔部为四边形等多边形状的多边形筒形状。
83.引导板部34是从主体部31的上表面向上方突出并沿前后方向延伸设置的一对平板形状部,并列设置于隔着保持筒部32的上端开口部的左右方向的2处。并且,如图6所示,主体部31的整体由下方侧开口且中空的中空构造形成,保持器具3的重量被轻量化。
84.另外,以上说明的保持器具3的结构是一例,也可以设为上述以外的结构。例如,在上述结构中,将保持器具3设为一体成型,但也可以由多个部件构成。
85.(3-2.轨道)
86.如图6所示,轨道4具有轨道部40和水槽部47,由滑动性高的材料(例如树脂。也可以是金属等)一体成型。轨道部40具有:左右一对上轨道板41a,它们分别在左右方向上具有规定的宽度,且在前后方向上延伸设置;以及左右一对下轨道板42a,它们在这些上轨道板41a的下方位置处同样分别在左右方向上具有规定的宽度,且在前后方向上延伸设置。在上轨道板41a的对置侧的缘部形成有向下方突出的上轨道突起部44。在上轨道突起部44与下轨道板42a之间的空间收纳有保持器具3的主体部31。在一对上轨道板41a之间的上轨道槽43a中收纳有保持器具3的一对引导板部34。
87.水槽部47具有:在前后方向上延伸设置的一对侧壁部47a;和跨于这一对侧壁部47a的下端且在前后方向上延伸设置的底壁部47b。水槽部47整体是上方开放的截面大致u字状的长尺寸的水槽,在内部贮存有培养液48。培养液48例如借助泵等适当的流动单元(省略图示)在前后方向上流动。
88.被插入到轨道4中的保持器具3收纳于轨道部40的内侧的空间46。保持器具3的主体部31的下表面以能够滑动的方式与左右的下轨道板42a的上表面接触,并且,主体部31的上表面与左右的上轨道突起部44抵接。这样,通过采用从上下夹着保持器具3的结构,能够防止保持器具3的倾斜或倾倒。保持器具3的主体部31的下表面即保持器具支承面38如上述那样,由于主体部31的下表面开口,因此与下轨道板42a的上表面即轨道支承面45的接触面积减少,能够提高与轨道4的滑动性。
89.如图6所示,在保持器具3的保持筒部32的孔部33填充有培养基50,对从播种于培养基50的种子生长出的植物2的茎部2a进行保持。植物2以如下方式生长:经由孔部33的下端开口部将根部2c浸入于水槽部47内的培养液48中,并且经由孔部33的上端开口部使叶部
2b向轨道4的上方膨出。作为填充于孔部33内的培养基50,例如可以使用琼脂等凝胶状培养基,也可以使用海绵、聚氨酯、石棉等固体培养基。若最终植物2的生长进展,则茎部2a的直径变粗到与孔部33的内径大致一致,大部分的培养基50脱落,保持筒部32成为直接支承植物2的状态。
90.另外,在植物栽培系统1中,使用间隔件(省略图示),该间隔件被插入到多个保持器具3之间,从而规定保持器具3的前后方向的间隔。间隔件也可以使用与上述保持器具3通用的部件、即在孔部33不填充培养基50的空的状态的保持器具3。或者,只要是以能够在轨道4上移动的方式被支承的结构,即使例如像不具备保持筒部32的形状(孔部33被填埋的形状)等那样成型为与保持器具3不同的形状,也能够用作间隔件。因此,在轨道4中,多个间隔件也与多个保持器具3一起沿着前后方向排列,它们整体被支承为能够移动。进而,每当从轨道4的前后方向上的一侧供给间隔件时,已经被支承的保持器具3及间隔件整体朝向另一侧移动。另外,若光照射到培养液48,则促进藻类的产生,因此间隔件优选为不具备孔部的形状。
91.另外,以上说明的轨道4的结构为一例,也可以设为上述以外的结构。例如,在上述结构中,将轨道4设为一体成型,但也可以由多个部件构成。
92.<4.植物分离装置>
93.接着,使用图7~图12,对植物分离装置10的详细情况进行说明。
94.(4-1.植物分离装置的结构)
95.首先,使用图7至图10对植物分离装置10的结构的一例进行说明。图7是表示植物分离装置10的整体结构的一例的侧视图,图8是表示植物分离装置10的整体结构的一例的主视图。另外,植物分离装置10的设置位置只要在后方的搬运机器人6的可搬运范围内即可,能够配置在栽培搁板5的下方,或者在侧方排列,或者直列排列,或者配置在各种各样的位置。另外,关于设置植物分离装置10的朝向(保持器具3的搬运方向),也不限于与栽培搁板5的搬运方向平行的关系,也可以是正交或形成规定的角度那样的配置关系。因此,在图7至图10中省略了方向的图示。
96.如图7及图8所示,植物分离装置10具有框架60、轨道70、第一分离装置80、第二分离装置90、空气喷嘴100、清扫装置110及集装箱120。
97.框架60具有:一对支柱框架61,它们以在宽度方向(图8中左右方向)上对置的方式沿着上下方向设置;支承框架62,其从一对支柱框架61的上端向搬运方向一侧(图7中左侧)突出,并且沿着宽度方向架设;梁框架63,其在支承框架62的下方沿着宽度方向架设在一对支柱框架61之间;支承框架65,其借助梁框架63经由悬吊部件64支承,并且向搬运方向一侧突出;以及支承框架66,其借助梁框架63经由悬吊部件64支承,并且向搬运方向另一侧(图7中右侧)突出。此外,框架60的上述结构是一例,也可以是上述以外的框架结构。
98.轨道70(支承部件的一例)借助梁框架63经由悬吊部件67大致水平地被支承,将多个保持器具3支承为能够在搬运方向(图7中的右方向)上移动。轨道70以在宽度方向上分离规定尺寸的平行的配置具有一对位于下方的支承轨道板70a和位于上方的抑制轨道板70b的组合。相同组的支承轨道板70a和抑制轨道板70b经由厚度尺寸与保持器具3的主体部31相同的支柱部71而固定。即,轨道70的整体结构与从上述轨道4除去水槽部47后的轨道部40的结构相同。由此,轨道70与轨道部40同样地,能够在使多个保持器具3直列排列的状态下
将其整体支承为能够移动。
99.另外,在轨道70中,在保持器具3的搬运方向上游侧,抑制轨道板70b比支承轨道板70a短,其上游侧端部以规定的角度向上方翘起地弯曲。因此,搬运机器人6容易避免与抑制轨道板70b的干涉,并且容易将保持器具3(保持根部2c及茎部2a的状态下的保持器具)载置于支承轨道板70a的上游侧端部,另外,容易将保持器具3的主体部31插入于支承轨道板70a与抑制轨道板70b之间。进而,每当搬运机器人6插入1个保持用具3时,排列的多个保持用具3整体分别被搬运至规定的位置。此时,位于搬运方向的最下游侧的保持器具3从轨道70脱离而落下,向预先配置在下方的集装箱(省略图示)内集聚。
100.第一分离装置80配置在轨道70的上方,具有气缸81和杆82。气缸81使杆82在上下方向上升降移动,相对于被轨道70支承的保持器具3的孔部33,使杆82从孔部33的贯通方向上的上侧(一侧的一例)朝向下侧(另一侧的一例)贯穿插入,由此将收获后的植物2的残留部分即茎部2a和根部2c向保持器具3的下方推出。另外,也可以代替气缸81而使用螺线管、马达等致动器。另外,以下适当地将茎部2a和根部2c称为“残留部分2a、2c”。杆82(第一推压部件的一例)是在末端形成有锥形形状的倒角的棒状部件,外径形成为比保持器具3的孔部33的内径稍小的直径尺寸。第一分离装置80以使杆82的中心轴线ax1与通过搬运机器人6而被定位在轨道70上的分离位置(图7中左端的保持器具3的位置)的保持器具3的孔部33的中心位置大致一致的方式固定于上述的支承框架62。
101.第二分离装置90配置于轨道70的下方。图9及图10表示第二分离装置90的结构的一例。图9是表示第二分离装置90的结构的一例的俯视图,图10是表示第二分离装置90的结构的一例的侧视图。如图9和图10所示,第二分离装置90具有气缸91、杆92和梳齿93。气缸91使杆92进退移动而使梳齿93沿着一对导杆94的滑动方向进退移动,由此,第二分离装置90在被轨道70支承的保持用具3的下侧,使推压植物2的残留部分2a、2c的梳齿93在水平方向上动作。另外,也可以代替气缸91而使用螺线管、马达等致动器。梳齿93(第二推压部件的一例)通过在与植物2的残留部分2a、2c抵接的部分具有凸部93a、93b(凹凸部的一例)及在该凸部93a、93b之间形成的凹部93c(凹凸部的一例),从而形成为大致梳齿状。2个凸部93a、93b不是左右对称的形状,一侧的凸部93a在中心轴线ax2的方向上比另一侧的凸部93b长。这样,通过使2个凸部的突出量不同,梳齿93容易扎入植物2的残留部分2a、2c。第二分离装置90以使杆92的中心轴线ax2与第一分离装置80的杆82的中心轴线ax1大致呈直角地交叉的方式固定于上述的支承框架65。当气缸91使杆92缩回时,梳齿93从植物2的残留部分2a、2c退避,当使杆92伸长时,梳齿93扎入植物2的残留部分2a、2c而进行推压。另外,梳齿93的动作方向不限于水平方向,只要是与孔部33的贯通方向(上下方向)交叉的方向,也可以是相对于水平方向倾斜的方向。
102.集装箱120(容器的一例)配置于第一分离装置80及第二分离装置90的铅垂方向下侧,收纳从保持器具3分离的残留部分2a、2c。在图7以及图8所示的例子中,集装箱120是在下端具有多个车轮121的可动式的容器,当被残留部分2a、2c充满时,更换为新的集装箱120。
103.空气喷嘴100(空气喷出装置的一例)经由空气管101而与空气供给装置(省略图示)连接,向收纳于集装箱120的植物2的残留部分2a、2c喷出空气。
104.清扫装置110配置在轨道70的下方,具有气缸111和刷子112。气缸111使刷子112在
上下方向上升降移动,使刷子112贯穿插入到借助第一分离装置80和第二分离装置90分离了残留部分2a、2c的保持器具3的孔部33中。另外,也可以代替气缸111而使用螺线管、马达等致动器。刷子112(清扫器具的一例)是在杆113的外周实施了植毛的棒状部件。杆113的外径比保持器具3的孔部33的内径稍小,包含植毛部的刷子112的外径比孔部33的内径稍大。气缸111以刷子112的中心轴线ax3与被搬运机器人6定位在轨道70上的清扫位置(在图7中例如从左起第四个保持器具3的位置)上的保持器具3的孔部33的中心位置大致一致的方式固定在上述的支承框架66上。
105.(4-2.植物分离工序)
106.接着,使用图11对由植物分离装置10执行的植物分离工序的一例进行说明。首先,被搬运到前述的收获装置9的保持器具3如图11的(a)所示,使连结上方的叶部2b和下方的根部2c的茎部2a贯通到孔部33中,成为保持植物2的整体的大致中央位置的状态。收获装置9利用切割器等切断机构51在孔部33的上端开口部附近切断植物2,仅分离并收获叶部2b。其结果是,如图11的(b)所示,保持器具3在使茎部2a贯通孔部33的状态下,成为在该茎部2a的上端残留叶根部2d且在茎部2a的下方连带根部2c的状态,被搬运到植物分离装置10。另外,由于叶根部2d的外径比孔部33的内径大,因此与其相连的茎部2a和根部2c不会因自重而从保持器具3脱落。
107.该状态的保持器具3由搬运机器人6插入、搬运到植物分离装置10的轨道70,并被定位在上述分离位置。与此同步地,如图11的(c)所示,第一分离装置80的气缸81工作,使杆82从上方下降而插入并贯通孔部33。由此,在叶根部2d的中心开设孔,并且将茎部2a和根部2c从该叶根部2d切断而从孔部33的下方推出。由此,在茎部2a和根部2c落下的情况下被收纳在集装箱120中。之后,气缸81使杆82上升移动。
108.另外,即使利用第一分离装置80的杆82将残留部分2a、2c从孔部33向下方推出,由于残留部分2a、2c所具有的水分的影响而附着于保持器具3,或者与相邻的保持器具3之间缠绕根部2c等,从而存在残留部分2a、2c未从保持器具3分离的情况。
109.因此,在杆82上升后,如图11的(d)所示,第二分离装置90的气缸91工作而使杆92伸长,使梳齿93沿水平方向移动而推压残留部分2a、2c。由此,残留部分2a、2c从保持器具3分离而向下方落下,收纳于容器120。之后,气缸91使活塞杆92缩回而使梳齿93退避,并且通过搬运机器人6重新插入保持器具3来进行保持器具3的下一搬运动作。
110.另外,在该时刻,在保持器具3的孔部33的上方侧残留有叶根部2d。另外,在孔部33的内周面例如附着有蓝藻等藻,或者成为被灰尘等弄脏了的状态的情况较多。为了再利用保持器具3,优选将叶根部2d分离,并且使孔部33成为清洁的状态。
111.该状态的保持器具3被搬运到比上述分离位置靠下游侧的位置,并被定位在上述的清扫位置。与此同步地,如图11的(e)所示,清扫装置110的气缸111工作,使刷子112从下方上升而贯通保持器具3的孔部33。由此,刷子112相对于孔部33的内周面整体均等地滑动接触,以刮落上述藻、污垢的方式进行清扫,并且将叶根部2d向保持器具3的上方推出。之后,气缸111使刷子112下降移动后,通过搬运机器人6重新插入保持器具3,进行保持器具3的下一搬运动作。此时,即使在被推出的叶根部2d骑在保持器具3的上表面的状态下,之后保持器具3也被搬运而从轨道70的端部落下,能够借助与下方的保持器具回收用的集装箱(省略图示)的底面碰撞的冲击将叶根部2d分离。
112.如上所述,在植物分离装置10中,相对于从收获装置9搬运来的保持器具3,将残留在孔部33中的茎部2a、根部2c以及叶根部2d去除,另外,对孔部33的内周面上的藻或污垢等进行清扫,从而能够自动地对保持器具3进行后处理使其成为能够再利用的状态。
113.(4-3.空气喷出动作)
114.接着,使用图12,对空气喷嘴100的空气喷出动作的一例进行说明。如图12所示,利用第一分离装置80及第二分离装置90从保持器具3分离的植物2的残留部分2a、2c向下方落下而收纳于集装箱120。通过依次执行残留部分2a、2c的分离,残留部分2a、2c堆积在集装箱120的内部。当堆积的残留部分2a、2c到达根部2c从在第一分离装置80的下方位置处被轨道70支承的保持器具3垂下的区域即区域ar时,堆积物与从保持器具3垂下的根部2c接触,轨道70上的保持器具3的位置有可能偏移。在该情况下,在第一分离装置80中无法将杆82贯穿插入于孔部33。另外,若堆积物的高度进一步变高,则有可能妨碍第一分离装置80或第二分离装置90的动作。根据以上的主要原因,认为无法将残留部分2a、2c从保持器具3适当地分离。
115.因此,在本实施方式中,如图12所示,利用空气喷嘴100朝向堆积于集装箱120的残留部分2a、2c喷出空气。空气的喷出目的地是上述区域ar的下方的空间s。由此,能够破坏堆积的残留部分2a、2c的山,防止堆积物到达与从被轨道70支承的保持器具3垂下的根部2c接触的高度。其结果是,能够防止轨道70上的保持器具3的位置偏移、以及第一分离装置80和第二分离装置90的动作受到阻碍。
116.<5.实施方式的效果>
117.如以上说明的那样,本实施方式的植物分离装置10具有:保持器具3,其具备贯通的孔部33,将作为栽培对象的植物2保持于该孔部33;轨道70,其将保持器具3支承为能够移动;第一分离装置80,其相对于被轨道70支承的保持器具3的孔部33,使推压收获后的植物2的残留部分2a、2c的杆82从孔部33的贯通方向的上侧朝向下侧贯穿插入;以及第二分离装置90,其在被轨道70支承的保持器具3的下侧,使推压残留部分2a、2c的梳齿93在与贯通方向交叉的方向上动作。
118.在本实施方式的植物分离装置10中,通过利用第一分离装置80使杆82贯穿插入于保持器具3的孔部33,从而将收获后的植物2的残留部分2a、2c(茎部2a和根部2c)从孔部33推出,从保持器具3分离。然而,由于残留部分2a、2c所具有的水分的影响,在从孔部33被推出后也附着于保持器具3,或者与相邻的保持器具3之间缠绕根部2c等,从而存在无法将残留部分2a、2c从保持器具3适当地分离的情况。
119.因此,在本实施方式中,利用第二分离装置90使梳齿93在保持器具3的孔部33的下侧沿与贯通方向交叉的方向动作。由此,能够将利用杆82从孔部33推出但未从保持器具3分离而残留于孔部33的下侧的残留部分2a、2c向与该推出的方向交叉的方向推压,从而从保持器具3分离。这样,能够执行将收获了生长的植物2之后残留的残留部分2a、2c从孔部33的贯通方向一侧向另一侧推出的工序、和在孔部33的另一侧向与贯通方向交叉的方向推压而使其落下的工序这2个阶段的分离工序,能够将残留部分2a、2c从保持器具3适当地分离。
120.另外,在本实施方式中特别是,梳齿93在与残留部分2a、2c抵接的部分具有凸部93a、93b以及凹部93c。由此,在利用梳齿93推压残留部分2a、2c时,凸部93a、93b容易扎入而卡住,能够提高将残留部分2a、2c从保持器具3分离的功能。
121.另外,在本实施方式中特别是,植物分离装置10还具有:集装箱120,其配置于第一分离装置80或第二分离装置90的铅垂方向下侧,收纳从保持器具3分离的残留部分2a、2c;以及空气喷嘴100,其向收纳于容器120的残留部分2a、2c喷出空气。
122.利用第一分离装置80或第二分离装置90从保持器具3分离的植物2的残留部分2a、2c向下方落下而收纳于集装箱120。通过依次执行残留部分2a、2c的分离,残留部分2a、2c堆积于集装箱120。当堆积的残留部分2a、2c到达区域ar时,堆积物与从保持器具3垂下的根部2c接触,轨道70上的保持器具3的位置有可能偏移。在该情况下,在第一分离装置80中无法将杆82贯穿插入于孔部33。另外,若堆积物的高度进一步变高,则有可能妨碍第一分离装置80或第二分离装置90的动作。根据以上的主要原因,认为无法将残留部分2a、2c从保持器具3适当地分离。因此,在本实施方式中,利用空气喷嘴100向收纳于集装箱120的残留部分2a、2c喷出空气。由此,能够破坏堆积的残留部分2a、2c的山,防止堆积物到达与从被轨道70支承的保持器具3垂下的根部2c接触的高度。其结果是,能够防止轨道70上的保持器具3的位置偏移、以及第一分离装置80和第二分离装置90的动作受到阻碍。
123.另外,在本实施方式中特别是,植物分离装置10还具有清扫装置110,该清扫装置110使刷子112贯穿插入于由第一分离装置80或第二分离装置90分离了残留部分2a、2c的保持器具3的孔部33。
124.保持器具3的孔部33的内侧大多情况成为附着藻类等弄脏的状态。因此,在本实施方式中,通过使刷子112贯穿插入于将残留部分2a、2c分离后的保持器具3的孔部33,能够清扫孔部33的内侧而除去污垢,能够对保持器具3进行清洁以便再利用。
125.另外,在本实施方式中特别是,植物栽培系统1具有上述的植物分离装置10,该植物栽培系统1具有:保持器具3,其具备贯通的孔部33,在该孔部33保持作为栽培对象的植物2;和通过使保持器具3在规定的期间移动而使植物2生长的栽培搁板5。由此,能够实现如下的植物栽培系统1:通过使由保持器具3保持的植物2生长,并且从保持器具3适当地分离收获所生长的植物2之后残留的残留部分2a、2c,从而能够反复再利用保持器具3。
126.<6.变形例>
127.另外,公开的实施方式不限于上述内容,在不脱离其主旨以及技术思想的范围内能够进行各种变形。
128.例如,即使在前述的间隔件具有与保持器具3相同的孔部33的情况下、或将保持器具3自身用作间隔件的情况下,也存在即使在该孔部33中不保持植物2也会在轨道4的搬运中弄脏内周面的情况,因此也可以利用清扫装置110清扫间隔件。
129.另外,在以上的说明中,在存在“垂直”、“平行”、“平面”等的记载的情况下,该记载并不是严格的意思。即,这些“垂直”、“平行”、“平面”允许设计上、制造上的公差、误差,是“实质上垂直”、“实质上平行”、“实质上平面”的意思。
130.另外,在以上的说明中,在存在外观上的尺寸、大小、形状、位置等“同一”、“相同”、“相等”、“不同”等的记载的情况下,该记载并不是严格的意思。即,这些“同一”、“相同”、“相等”、“不同”允许设计上、制造上的公差、误差,是“实质上同一”、“实质上相同”、“实质上相等”、“实质上不同”的意思。
131.另外,除了以上已经叙述的以外,也可以适当组合基于上述实施方式、各变形例的方法。此外,虽未一一例示,但上述实施方式、各变形例在不脱离其主旨的范围内,可施加各
种变更而实施。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
