1.本发明涉及一种拉拔工具的技术领域,具体而言是指一种结构简单、且工作行程长的机械式拉拔装置,以能加大开爪与闭爪的角度,并兼具易于操作及快速拆卸的效,而能增进操作的安全性。
背景技术:
2.各种圆盘、轴承、齿轮、皮带轮等环状构件系固设于装配轴上产生连动,当需要分离该环状构件与该装配轴时,主要系以拉拔器为主,现有拉拔器是在一爪座外缘枢设有复数供勾掣环状构件的勾爪,且爪座中心设有一可选择性顶掣该装配轴顶端的顶推元件(如螺杆或液压缸),供通过操作顶推元件来顶推该装配轴,使环状构件与装配轴两者可相对位移分离。然传统拉拔器的勾爪无法同步张开,且闭合时系利用勾爪的向下自重来完成,因此勾爪的张合动作需要个别将其拨动张开,而勾掣环形构件时也需特别注意其各勾爪是否平稳同步勾掣,在操作上极为不便,且如未平稳同步勾掣即可能发生勾爪在拆卸作业中滑脱的现象,造成安全上的顾虑;
3.为此,业界提供有多种爪座上各该勾爪可同步张爪或闭爪的结构,如图1所示的美国us05,887,328专利案,其是在一爪座90周缘枢设有复数向下的勾爪91,且爪座90下方利用一弹性件95顶撑滑设有一掣动环96,而各该勾爪91与该掣动环96间设有可相对滑设的导沟92及导环98,用以当向上压动该掣动环96时,可同步驱动各该勾爪91向外张爪,反的释放该掣动环96后可被弹性件95顶撑复位,且带动各该勾爪91同步向下闭爪勾住环状构件,最后利用螺设于爪座90的螺杆99来顶推装配轴。前述专利案虽然解决了勾爪同步张合的问题,但其勾爪91的动作受其导沟92与掣动环96导环98的相互限制,使得勾爪91的张合角度受限,而无法用于夹掣较大或较小外径的环形构件,再加上其勾爪91除了枢设于爪座90外也被掣动环96导环98所连结,使得该勾爪91无法被任意拆换,因此使用者必须准备多种规格的拉拔器才能满足作业上需求,再者当掣动环96上压驱动勾爪91张开时,其爪座85下端呈伸入勾爪91的作业区域内,无形间产生作业干扰,也缩短了可作业的空间及行程。
4.另如中国台湾申请第107213503号的专利案,其是在枢设在本体的爪件外缘形成有一受抵部,再者本体上有可弹性移动的调整机构,而调整机构具有复数对应前述爪件受抵部的卡抵部,供驱动该调整机构时可通过卡抵部与受抵部的结合而带动爪件同步张爪或闭爪。但其调整机构的卡抵部需伸入本体与爪件之间,使卡抵部与抵受部的结合尺寸不足,而限缩了爪件的张合角度,同时其无法承受拉拔环状构件时的拉力,甚至发生滑脱的现象,而如欲提高其强度,则需加大各元件的尺寸,使整个拉拔器变得笨重,存在不易于操作的状况,再者其整体结构因调整机构上需锁设复数卡抵部,不仅使其构件复杂化,且增加组装的难度,同时受到调整机构的卡抵部需与爪件卡抵部对准结合的限制,需提高其各零件的加工精度,否则可能造成爪件勾部与环状构件的接触点偏斜,使螺杆件无法在装配轴的轴线上直线作用,不仅造成驱动力分散的困扰,且稍一不慎可能在作业中发生夹件勾部与环状构件滑脱的现象,严重影响到使用的安全性。
技术实现要素:
5.简言之,如何解决前述现有拉拔器的问题,实有待相关业界再加以思索突破的目标及方向者。而本发明人乃针对前述拉拔器所面临的问题深入探讨,并凭借多年从事相关产业的研发经验,积极寻求解决的道,经不断努力的研究与试作,终于成功的开发出一种机械式拉拔装置,以克服现有者的困扰与不便。
6.基于此,本发明主要是通过下列的技术手段,来实现前述的目的及其功效,其包含有:
7.一爪座,其内部具有一安装室,该安装室内缘形成有一螺接孔,又爪座周缘具有复数枢接部,且爪座于对应各枢接部外壁形成有至少一连通安装室的长贯孔;
8.复数勾爪臂,可分别枢设于该爪座的枢接部,又勾爪臂端缘具有至少一可穿经相对长贯孔、且上下移动的凸椽;
9.一开爪滑筒,其可弹性移动设于该爪座安装室内,且该开爪滑筒于邻近底端的外缘上形成有一嵌卡部,供穿经该爪座长贯孔的各该勾爪臂凸椽共同嵌设;
10.一螺杆件,其螺设于该爪座的螺接孔。
11.且本发明并利用下列的技术手段,进一步实现前述的目的及功效;诸如:
12.所述的爪座的各该枢接部由两相对的枢耳所构成,且爪座于两枢耳间形成有一长贯孔,又各该勾爪臂夹枢于两枢耳间,且各该勾爪臂分别具有一可穿经该长贯孔的凸椽。
13.所述的爪座的各该长贯孔的上、下缘分别形成有向轴心倾斜扩大的一闭合限位面及一张开限位面,而各该勾爪臂的凸椽形成有向爪座轴心倾斜收束的一闭合限位面及一张开限位面,使其可提高凸椽强度、且增加各该勾爪臂的旋摆角度。
14.所述的爪座的各该枢接部的两侧枢耳上形成有一枢孔,而相对勾爪臂的枢部形成有一相对的枢孔,供利用一枢件枢设,且该枢件可拆解的螺栓与螺帽,供选择性逐一更换该爪座上的勾爪臂。
15.所述的爪座顶端外缘固设有一压盘,而该开爪滑筒外缘固设有一压盘,可便于驱动该开爪滑筒。
16.所述的爪座与该开爪滑筒的压盘上分别形成有复数相对的锁孔,供锁设有至少一限制件,以避免开爪滑筒与爪座完全分离。
17.所述的开爪滑筒的嵌卡部可以是由复数等高、且对应爪座长贯孔的贯穿插孔所构成,可确保该开爪滑筒的强度,并让勾爪臂凸椽的长度加长,让勾爪臂凸椽不致任意断裂或滑脱。
18.所述的开爪滑筒与该爪座间设有一弹性件,且该弹性件可以是设于开爪滑筒与该该爪座间的压缩弹簧。
19.所述的螺杆件的对应勾爪臂穿出的一端具有一分离的顶锥部,且该螺杆件与该顶锥部之间可选择性插接至少一接杆套筒,以配合不同的拆卸行程需求。
20.所述的螺杆件可螺设于该开爪滑筒上、且穿经夹座,而该开爪滑筒形成有一对应的螺接孔,该螺杆件能用于抵顶及推动该装配轴。
21.因此,本发明的主要优点是提供一种拉拔器,以能兼具有简化结构及加大勾爪臂的张合角度,且可供便于操作及快速完成拆卸工作。
22.且,本发明的再一主要优点是提供一种机械式拉拔装置,其能有效增加拆卸的工
作行程,提升其实用性。
23.另,本发明的另一主要优点是提供一种机械式拉拔装置,其能便于使用者更换不同规格的勾爪,使该机械式拉拔装置能适用于不同的拆卸需求。
24.再者,本发明的又一主要优点是提供一种机械式拉拔装置,其能让勾夹与环形构件在勾掣时可同一轴心,以确保夹掣能同步、且平稳,以避免勾爪臂在作业中滑脱,可以有效提高作业的安全性。
25.为使能进一步了解本发明的构成、特征及其他目的,以下乃举本发明的若干较佳实施例,并配合图式详细说明如后,同时让本领域技术人员能够具体实施。
附图说明
26.图1是现有us05,887,328专利案拉拔器的侧视剖面示意图。
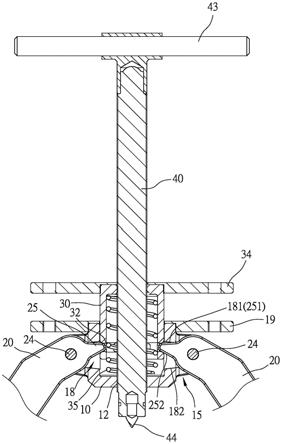
27.图2是本发明机械式拉拔装置的立体外观示意图。
28.图3是本发明机械式拉拔装置的立体分解示意图,供说明其各元件的态样及其相对关系。
29.图4是本发明机械式拉拔装置的侧视剖面示意图,供说明其组成及勾爪臂闭合时的状态。
30.图5是本发明机械式拉拔装置于实际使用时的动作剖面示意图,供说明其勾爪臂完全张开时的状态。
31.图6是本发明机械式拉拔装置于实际使用时的再一动作剖面示意图,供说明其勾爪臂闭合夹掣环形构件时的状态。
32.图7是本发明机械式拉拔装置于实际使用时的另一动作剖面示意图,供说明其驱动拆卸环形构件时的状态。
33.图8是本发明机械式拉拔装置于实际使用状态的立体外观示意图,供说明其串接接管套筒的状态。
34.图9是本发明机械式拉拔装置于实际使用状态的另一立体外观示意图,供说明其更换勾爪臂的状态。
35.图10是本发明机械式拉拔装置另一较佳实施例的立体外观示意图,供说明其具有三支勾爪臂的状态。
36.附图标记说明:10-爪座;11-安装室;12-螺接孔;15-枢接部;16-枢耳;17-枢孔;18-长贯孔;181-闭合限位面;182-张开限位面;19-压盘;191-锁孔;20-勾爪臂;21-勾部;22-枢部;23-枢孔;24-枢件;25-凸椽;251-闭合限位面;252-张开限位面;30-开爪滑筒;31-凸挡缘;32-嵌卡部;33-贯穿插孔;34-压盘;341-锁孔;35-弹性件;38-限制件;40-螺杆件;43-操作杆;44-顶锥部;441-嵌扣部;60-接杆套筒;61-嵌扣部;62-嵌扣部;80-环形构件;85-装配轴。
具体实施方式
37.本发明系一种机械式拉拔装置,随附图例示的本发明的具体实施例及其构件中,所有关于前与后、左与右、顶部与底部、上部与下部、以及水准与垂直的参考,仅用于方便进行描述,并非限制本发明,也非将其构件限制于任何位置或空间方向。图式与说明书中所指
定的尺寸,当可在不离开本发明的申请专利范围内,根据本发明的设计与需求而进行变化。
38.本发明的机械式拉拔装置系如图2、图3所示,其由一爪座10、至少二勾爪臂20、一开爪滑筒30及一螺杆件40所组成,使得该开爪滑筒30可驱动该爪座10上的各该勾爪臂20同步相对张开或闭合,用以同步夹掣一装配轴85上的一环形构件80(如图6所示),且利用设于爪座10的螺杆件40顶推该装配轴85相对该环形构件80位移(如图7所示);
39.而本发明特色结构的详细构成,则系如图3、图4所示,该爪座10内部形成有一贯穿的安装室11,且该爪座10安装室11内面底缘形成有一供前述螺杆件40螺设的螺接孔12,又该爪座10周缘具有至少二个供枢设前述勾爪臂20的枢接部15。根据某些实施例,如图10所示,本发明爪座10可以具有等角的三个枢接部15,供枢设三支勾爪臂20。而各该枢接部15由两可相对夹置勾爪臂20的枢耳16所构成,又两枢耳16上分别形成有一相对的枢孔17,再者该爪座10于各枢接部15处分别形成有至少一连通安装室11的长贯孔18,而本发明以形成于两枢耳16间的一个长贯孔18为主要实施例,且各该长贯孔18的上、下缘分别形成有一闭合限位面181及一张开限位面182,供限制该勾爪臂20的闭合角度及张开角度,又该闭合限位面181与该张开限位面182系呈向爪座10内部扩张的倾斜状,可在不改变结构下加大各该勾爪臂20的闭合角度及张开角度,又该爪座10顶端外缘固设有一压盘19,且该压盘19上形成有复数锁孔191;
40.另,各该勾爪臂20底端具有一勾掣环形构件80底缘的勾部21(如图6、图7所示),又该勾爪臂20邻近顶端形成有一对应爪座10枢接部15的枢部22,且该枢部22具有一枢孔23,供利用一枢件24将勾爪臂20以枢部22枢设于该爪座10的枢接部15上,其中该枢件24可以是由可拆卸的螺栓杆及螺帽、又或枢杆所组成,以便于拆卸及更换不同规格的勾爪臂20、20a(如图8所示],再者各该勾爪臂20顶端基部分别形成有至少一可穿经该爪座10相对长贯孔18的凸椽25,而本发明的勾爪臂20系以一个对应枢接部15两相对枢耳16长贯孔18的凸椽25为主要实施例,且该凸椽25的上下宽度小于该长贯孔18的上下宽度,使得该勾爪臂20可利用凸椽25于爪座10的长贯孔18内旋摆,又该勾爪臂20的凸椽25上、下缘分别形成有一闭合限位面251及一张开限位面252,供配合前述长贯孔18的闭合限位面181与张开限位面182来限制该勾爪臂20的闭合角度及张开角度,又该凸椽25的闭合限位面181与该张开限位面182系呈向自由端收束的倾斜状,可加大各该勾爪臂20的闭合角度及张开角度;
41.又该开爪滑筒30可弹性移动的设于该爪座10的安装室11内部,其是在该开爪滑筒30与该爪座10间设有一弹性件35,使该开爪滑筒30能产生向上复位的弹性预力,且该弹性件35可以选自设于开爪滑筒30的内部或外部的压缩弹簧,而本发明的弹性件35系以设于该开爪滑筒30内缘一凸挡缘31与该爪座10螺接孔12阶级面间的压缩弹簧为主要实施例,使得该弹性件35被隐藏于开爪滑筒30内,可增进美观,且不致外露而意外夹伤人员,可增进使用的安全性,又该开爪滑筒30外缘于邻近底缘形成有一嵌卡部32,而所述的嵌卡部32可以是由复数等高、且对应爪座10长贯孔18的贯穿插孔33、未贯穿嵌槽(图中未示)或一道未贯穿的环状凹槽(图中未示)所构成,供前述各该勾爪臂20的凸椽25嵌设,使得该开爪滑筒30上下移动时可同步驱动各该勾爪臂20以枢部22为中心向内闭合或向外张开,而本发明的嵌卡部32以相对长贯孔18的贯穿插孔33为主要实施例,可确保该开爪滑筒30的强度,且加长勾爪臂20凸椽25的长度,让两者结合关系更为确实稳固,使勾爪臂20凸椽25不致任意断裂或滑脱,又该开爪滑筒30顶端外缘固设有一压盘34,且该压盘34上形成有复数锁孔341,又该
开爪滑筒30与该爪座10的压盘34、19上的锁孔341、191可呈相对状,且各该锁孔341、191可以是穿孔或螺孔,供利用一限制件38锁设,其中限制件38可以是由一螺栓、又或一螺栓搭配一螺帽所组成;
42.而该螺杆件40系穿经该开爪滑筒内部、且螺设于该爪座10的螺接孔12,且该螺杆件40顶端可以选择性垂设有一操作杆43,可用于快速转动该螺杆件40相对爪座10向上或向下位移,另该螺杆件40自由端具有一用于抵顶前述装配轴85的顶锥部44。根据某些实施例,该顶锥部44与该螺杆件40可以是对接的分离结构,如第图8所示,可搭配典型的接杆套筒60来应用,其中该螺杆件40可以具有一嵌扣部401(可以是嵌孔或嵌柱),而该顶锥部44顶端具有一可相对插接的嵌扣部441(可以是嵌柱或嵌孔),又各该接杆套筒60两端可以是能与相邻螺杆件40、接杆套筒60或顶锥部44相对插接的嵌扣部61、62,使其可依实际需要改变螺杆件40的长度,以配合不同的拆卸行程需求。另根据某些实施例,该螺杆件40可螺设于前述开爪滑筒30上、且穿经夹座10,其中该开爪滑筒30形成有一对应的螺接孔(图中未示),该螺杆件40一样能用于抵顶及推动该装配轴80;
43.如此,可通过压动该开爪滑筒30相对爪座10弹性位移,而带动爪座10上的各该勾爪臂20同步张合以勾掣环形构件80,且利用该爪座10上的螺杆件40来相对抵顶及推动该装配轴85,而组构成一能分离该环形构件80与装配轴85的机械式拉拔装置者。
44.通过前述的结构设计,本发明机械式拉拔装置于实际使用时,则系如图4所示,使用前其螺杆件40系退离该装配轴85,而该爪座10上的开爪滑筒30被弹性件35回复预力上移,令该开爪滑筒30可带动爪座10上的各该勾爪臂20凸椽25向上位移,使得各该勾爪臂20以枢件24为轴心呈向下闭合状,且由于各该勾爪臂20的凸椽25与爪座10的长贯孔18的上缘闭合限位面251、181相对贴抵,因此本发明各该勾爪臂20闭合至最小角度时,并能限制该开爪滑筒30上移位置、且避免被弹性件35弹力脱出,故本发明的开爪滑筒30无需另外设置限位机构;
45.而当欲进行装配轴85上的环形构件80的拆卸时,则系如图5、图6所示,驱动该爪座10上的开爪滑筒30向下(如由操作者动手压动该开爪滑筒30),使该开爪滑筒30向下移动且同步压缩该弹性件35产生回复预力,当该开爪滑筒30向下时可同步驱动枢设于爪座10上的勾爪臂20凸椽25向下,而令各该勾爪臂20可以与爪座10枢接处为轴心而向上张开,如图5显示为本发明各该勾爪臂20张开至最大角度时,各该勾爪臂20凸椽25下缘的张开限位面182可贴抵爪座10长贯孔18下缘的张开限位面182,接着将环形构件80置于各该勾爪臂20所围范围内,并释放该开爪滑筒30的下压力量,如图6所示,使该开爪滑筒30可受弹性件35回复预力作用而向上移动逐步退回,且该开爪滑筒30可带动爪座10上各该勾爪臂20的凸椽25同步向上,而令各该勾爪臂20的勾部21一端向下闭合,并让各该勾爪臂20的勾部21可同步平稳地勾掣于该环形构件80的底面边缘;
46.之后,如图7所示,通过该操作杆43螺转该螺杆件40向下顶抵及推动该装配轴85,由于该环形构件80被爪座10的各该勾爪臂20的勾部21由底缘勾掣,使得该装配轴85受该螺杆件40推动而与该环形构件80产生相对运动,让该装配轴85与该环形构件80可逐步分离,最后可令环形构件80与装配轴85完全脱离。再者,当该螺杆件40行程不足时,则如图8所示,可退回该螺杆件40后搭配典型的接杆套筒60来应用,以配合不同的拆卸行程需求。
47.另,本发明的机械式拉拔装置可以依需要直接更换不同规格的勾爪臂20,则系如
图9所示,由于其爪座10与开爪滑筒30的相对压盘19、34间锁设有至少一限制件38,其可以避免该开爪滑筒30受弹性件35回复预力影响而脱离时,则可逐一拆卸各该勾爪臂20与爪座10枢接部15的枢件24(如螺栓与螺帽),将原勾爪臂20取下,再将新的勾爪臂20a的凸椽25a依序穿经爪座10长贯孔18、开爪滑筒30卡嵌部32内(如图4所示),并利用该枢件24将新的勾爪臂20a枢设于该爪座10的枢接部15两枢耳16间,且依前述方式逐一拆下该爪座10旧的勾爪臂20及更换新的勾爪臂20a,使其可适用于不同规格或型态的环形构件80或装配轴85,有效提升其实用性。
48.通过前述的设计与说明,本发明的机械式拉拔装置可以通过驱动该爪座10上的开爪滑筒30,而带动枢设于该爪座10的复数勾爪臂20同步向外张开或向内闭合,供同步勾掣环形构件80,且利用驱动该螺杆件40来顶抵及推动该装配轴85,进而使该环形构件80可与该装配轴85分离,本发明的机械式拉拔装置不仅结构简单,且由于各该勾爪臂20可以同步动作,使其能平稳勾掣及拆卸该环形构件80,不致任意滑脱,且具有易于操作的效,而能大幅增进其实用性及安全性,同时本发明进一步具有下列的功效,诸如:
49.1、本发明的爪座10上的各该勾爪臂20由开爪滑筒30来驱动凸椽25使其可同步张开或闭合,令勾爪臂20的动作范围内除了用于顶撑装配轴85的螺杆件40外并无任何其他组件,而不会造成工作范围内的干涉,同时可以有效增加拆卸工作行程,使工作更为简单、有效率。
50.2、本发明的组合定位系利用各该勾爪臂20的凸椽25相对穿经爪座10长贯孔18,且与开爪滑筒30嵌卡部32结合,使爪座10上无需另外设置开爪滑筒30的限制机构,可以进一步简化结构,且当配合爪座10与开爪滑筒30的压盘19、34间设有限制件38时,更能逐一更换不同的勾爪臂20,而改变适用规格,对于工作人员来说除了具有易于组装、更换的效外,并可以减少准备不同规格机械式拉拔装置的成本。
51.3、本发明的开爪滑筒30可利用同一高度的嵌卡部32的贯穿插孔33来同步驱动各该勾爪臂20,使各该勾爪臂20勾部21能同时且稳固地与环形构件80接触勾掣外,配合该爪座10长贯孔18与勾爪臂20凸椽25具有倾斜状相对的闭合限位面181、251与张开限位面182、252,而各该勾爪臂20能加大张开角度及缩小闭合角度,进而增加工作范围,同时可以提高该勾爪臂20的凸椽25的承受强度,进而提升其驱动力,可用于拆卸结合力更强或锈固粘合的环形构件80。
52.以上说明对本发明而言只是说明性的,而非限制性的,本领域普通技术人员理解,在不脱离权利要求所限定的精神和范围的情况下,可作出许多修改、变化或等效,但都将落入本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。