1.本发明涉及一种工件抓手,特别是涉及一种可调范围的球形工件抓手。
背景技术:
2.在工业自动化领域,经常使用机械手实现抓取动作。传统的机械手应用于一般工件的抓取,通常采用三爪夹具从球形的圆周三个方向进行抓取,或者通过左右对夹的方式并在夹子的相对面设置凹腔以夹取球形工件。这些机械抓手由于夹爪的角度不容易调节,因此为了满足不同尺寸工件的稳定抓取,同时机械手需要设置较大的抓取力,容易对工件造成损坏。对一些精密工件采用的柔性机械手,结构较为复杂,加工生产成本较高,安装和维护的难度较高,更为关键的是,只能用于特定型号、尺寸的工件,使用具有局限性。
技术实现要素:
3.针对上述现有技术的缺陷,本发明提供了一种可调范围的球形工件抓手,目的是抓手可以适应球形工件尺寸而调节合适的抓取力。
4.本发明技术方案如下:一种可调范围的球形工件抓手,包括中轴柱和围绕所述中轴柱设置的不少于三个的夹爪,所述中轴柱设有调节座和夹持座,所述夹持座位于所述调节座下方,所述调节座和夹持座沿所述中轴柱升降,所述夹爪的顶部与第一连杆的头端铰接,所述第一连杆的尾端与调节座铰接,所述夹爪的中部与第二连杆的头端铰接,所述第二连杆的尾端与中轴柱铰接,所述夹持座与第二连杆通过第三连杆连接,所述夹持座升降时使所述夹爪收拢或张开。
5.进一步地,为了更好地控制抓手的夹持力,所述中轴柱设有夹持电机,所述夹持电机连接有丝杆,所述丝杆与所述夹持座配合构成丝杆螺母运动副,所述丝杆的底端从所述中轴柱的下端面伸出,所述丝杆设有扭矩传感器用于测量所述丝杆转动时的扭矩。
6.进一步地,为了避免丝杆与工件接触时对工件造成损伤,同时提高工件被夹持时的稳定性,所述丝杆的底端设有弹性吸盘。
7.进一步地,所述中轴柱设有升降电机,所述升降电机驱动所述调节座移动。
8.进一步地,为了更好地适配各种尺寸的球形工件,所述夹爪包括基座和夹头,所述第一连杆和第二连杆与所述基座连接,所述夹头与所述基座为可拆卸连接,所述夹头的内侧面设置为弧面。
9.本发明所提供的技术方案的优点在于:
10.通过调节座的移动,使夹爪在夹持前可以根据球形工件的大小调整夹爪张开角度,从而使夹爪在收拢夹持工件时,夹爪与工件的接触点能保持在理想位置,只需要适当的夹持力即可稳定夹持工件而避免造成损伤。
附图说明
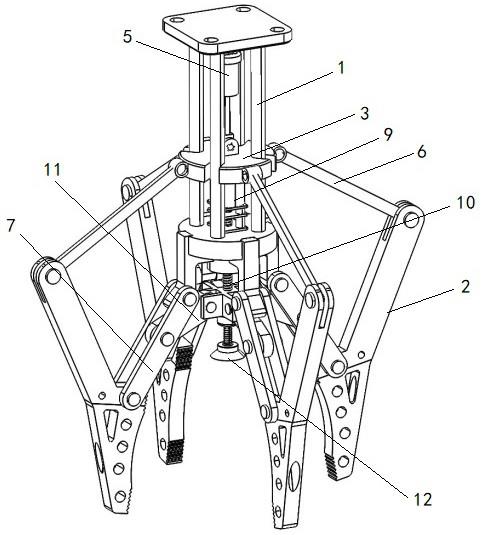
11.图1是实施例的可调范围的球形工件抓手的立体结构示意图。
12.图2是可调范围的球形工件抓手的中轴柱结构示意图。
13.图3是中轴柱与夹爪连接结构示意图。
14.图4是夹持座与第二连杆连接结构示意图。
15.图5是夹爪结构示意图。
16.图6是实施例的可调范围的球形工件抓手在夹持较大直径工件时结构示意图。
具体实施方式
17.下面结合实施例对本发明作进一步说明,应理解这些实施例仅用于说明本发明而不用于限制本发明的范围,在阅读了本说明之后,本领域技术人员对本说明的各种等同形式的修改均落于本申请所附权利要求所限定的范围内。
18.请结合图1至图4所示,本实施例的可调范围的球形工件抓手包括中轴柱1和围绕中轴柱1设置的四个的夹爪2,四个夹爪2等分分布在中轴柱1的四周。一般夹爪2至少设置为三个以稳定抓持球形工件,也可设置四个以上的夹爪2,夹爪2的增多使得抓手零部件增多,在周向的布置更为紧密,运动部件间容易发生干涉,因此夹爪2也不宜过多。
19.中轴柱1的结构包括顶板101、底板102、导柱103和连接支脚104组成,四根导柱103固定连接于顶板101和底板102之间,构成中空的笼状构造,四个连接支脚104由底板102向下延伸设置。四个连接支脚104与底座的连接点位于相邻的导柱103之间。在顶板101和底板102之间设有一个呈圆盘状的调节座3,调节座3四周开设四个凹槽,凹槽与导柱103向配合。在中轴柱1的顶板101和调节座3之间连接一个升降电机5,升降电机5驱动调节座3沿着导柱103进行升降。在调节座3的外周,每相邻的两个凹槽之间设置一个铰接点,每个铰接点与一根第一连杆6的尾端铰接,第一连杆6的头端则与一个夹爪2的顶部铰接。中轴柱1的连接支脚104的下端也为铰接点,每个连接支脚104的铰接点与一根第二连杆7的尾端铰接,第二连杆7的头端则与一个夹爪2的中部铰接。
20.各个夹爪2的夹持力来源于一个可以沿中轴柱1的轴向升降的夹持座8,本实施例中,夹持座8设置在中轴柱1的底板102下方,在中轴柱1的底板102上竖直设置一夹持电机9,夹持电机9驱动一竖直的丝杆10转动,该丝杆10由中轴柱1的底板102向下延伸并与夹持座8配合形成丝杆螺母运动副。夹持座8的周向四等分位置分别与一根第三连杆11的尾端铰接,第三连杆11的头端则与第二连杆7的中部铰接,如此在夹持电机9驱动丝杆10转动时,夹持座8就可进行上下移动,从而通过第三连杆11带动第二连杆7内收或外张,进而实现了夹爪2的内收与外张,进行工件的夹持与释放。
21.在一些实施例中,在丝杆10上设置有扭矩传感器4,通过该扭矩传感器4测量丝杆10的扭矩,在夹爪2收缩过程中未触及工件时,丝杆10的扭矩处于一个较低值且相对稳定。当夹爪2触及工件时,夹爪2收到工件的反作用力增加且阻止夹持座8进一步移动使得丝杆10的扭矩增加,设置一个阈值当丝杆10的扭矩超过该阈值时可停止夹持电机9从而控制夹爪2的夹持力,不损伤工件。在丝杆10的底部设置有弹性吸盘12,当抓取工件时,工件的顶部可以由弹性吸盘12吸附,从而使得抓取更为稳固。另外请结合图5所示,为了进一步提高对不同球形工件抓取的适应性,夹爪2为两段式结构,包括基座201和夹头202,其中基座201用于与第一连杆6和第二连杆7铰接,夹头202的顶面设置销轴203和螺纹孔204,通过螺钉与基座201底面形成可拆卸的连接,夹头202的内侧面设置为弧面。在夹持不同球形工件时则可
以通过使用不同长度,以及具有不同弧度弧面的夹头202来提高夹持效果。
22.上述实施例的具体使用过程是这样的,在夹持工件前,首先通过升降电机5升降,调整夹爪2间的张开角度,一般在夹持较小直径工件时,升降电机5驱动调节座3下移,使夹爪2的顶部外张而头端内收,减小夹爪2张开角度,而在夹持较小直径工件时,如图6所示,升降电机5驱动调节座3上移,使夹爪2的顶部内收而头端外张,增大夹爪2张开角度。在夹持时,通过夹持电机9驱动丝杆10转动,驱动夹持座8上移,使第三连杆11带动第二连杆7内收,从而使夹爪2整体向内收拢以夹持工件。
技术特征:
1.一种可调范围的球形工件抓手,包括中轴柱和围绕所述中轴柱设置的不少于三个的夹爪,其特征在于,所述中轴柱设有调节座和夹持座,所述夹持座位于所述调节座下方,所述调节座和夹持座沿所述中轴柱升降,所述夹爪的顶部与第一连杆的头端铰接,所述第一连杆的尾端与调节座铰接,所述夹爪的中部与第二连杆的头端铰接,所述第二连杆的尾端与中轴柱铰接,所述夹持座与第二连杆通过第三连杆连接,所述夹持座升降时使所述夹爪收拢或张开。2.根据权利要求1所述的可调范围的球形工件抓手,其特征在于,所述中轴柱设有夹持电机,所述夹持电机连接有丝杆,所述丝杆与所述夹持座配合构成丝杆螺母运动副,所述丝杆的底端从所述中轴柱的下端面伸出,所述丝杆设有扭矩传感器用于测量所述丝杆转动时的扭矩。3.根据权利要求2所述的可调范围的球形工件抓手,其特征在于,所述丝杆的底端设有弹性吸盘。4.根据权利要求1所述的可调范围的球形工件抓手,其特征在于,所述中轴柱设有升降电机,所述升降电机驱动所述调节座移动。5.根据权利要求1所述的可调范围的球形工件抓手,其特征在于,所述夹爪包括基座和夹头,所述第一连杆和第二连杆与所述基座连接,所述夹头与所述基座为可拆卸连接,所述夹头的内侧面设置为弧面。
技术总结
本发明公开了一种可调范围的球形工件抓手,包括中轴柱和围绕所述中轴柱设置的不少于三个的夹爪,所述中轴柱设有调节座和夹持座,所述夹持座位于所述调节座下方,所述调节座和夹持座沿所述中轴柱升降,所述夹爪的顶部与第一连杆的头端铰接,所述第一连杆的尾端与调节座铰接,所述夹爪的中部与第二连杆的头端铰接,所述第二连杆的尾端与中轴柱铰接,所述夹持座与第二连杆通过第三连杆连接,所述夹持座升降时使所述夹爪收拢或张开。本发明可根据工件尺寸调节夹爪的角度,更容易得到合适的夹持力,避免损伤工件。避免损伤工件。避免损伤工件。
技术研发人员:陈建
受保护的技术使用者:常熟理工学院
技术研发日:2022.03.14
技术公布日:2022/5/20
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
