1.本发明涉及一种肌力辅助装置,更具体地,涉及一种能够在人工作时提供辅助力的肌力辅助装置。
背景技术:
2.作为用于在人工作时辅助人的肌力的装置之一,可以举例安装在人的手臂上以辅助肌力的上臂肌力辅助装置。这种上臂肌力辅助装置安装有形成用于辅助由人的手臂的重量和人的手臂支撑的物体的重量引起的载荷的扭矩的机构。例如,上臂肌力辅助装置根据装置的旋转角度而具有不同大小的扭矩,其具有扭矩大小由旋转角度确定的函数关系。这种函数关系称为扭矩分布(torque profile)。
3.另一方面,肌力辅助装置所需的扭矩大小根据人执行的工作类型而不同。例如,即使上臂肌力辅助装置的旋转角度相同,施加到人的载荷程度也根据人执行的工作类型而变化。因此,当人执行的工作类型改变时,上臂肌力辅助装置所需的扭矩分布也需要改变。
4.然而,根据现有技术,为了改变扭矩分布,需要更换肌力辅助装置内部的组件(例如,弹簧)或调整内部组件的物理特性(例如,弹簧的拉力)。因此,根据现有技术,存在改变肌力辅助装置的扭矩分布繁琐的问题。
技术实现要素:
5.(一)要解决的技术问题
6.因此,本发明要解决的问题是提供一种肌力辅助装置,其能够容易地改变扭矩分布。
7.(二)技术方案
8.根据用于实现上述目的的本发明的一个方面,提供一种肌力辅助装置,包括:多连杆部,包括一个以上的连杆;分布调节部,与所述多连杆部的一侧结合并且被设置成一部分能够相对于中心自转;以及弹力提供部,与所述多连杆部的另一侧结合并且向所述多连杆部提供根据弹力的力,当所述分布调节部的一部分自转时,所述多连杆部的所述一侧能够相对于所述中心进行公转运动,所述分布调节部选择性地允许或限制所述多连杆部的所述一侧的运动。
9.所述多连杆部可以包括第一连杆,其一侧结合到所述分布调节部,当所述分布调节部自转时,所述第一连杆的所述一侧能够相对于所述中心进行公转运动,从而所述弹力提供部向所述多连杆部施加的力改变。
10.所述多连杆部可以进一步包括第二连杆,其一侧结合到所述弹力提供部,当所述分布调节部自转时,所述第二连杆的所述一侧移动,从而所述弹力提供部向所述多连杆部施加的力改变。
11.所述多连杆部可以进一步包括:第三连杆,第一区域可旋转地结合到所述第一连杆的另一侧,第二区域可旋转地结合到所述第二连杆的另一侧。
12.所述多连杆部可以进一步包括容纳所述多连杆部、所述分布调节部和所述弹力提供部的主体部,所述多连杆部可以进一步包括第四连杆,其一侧固定到所述主体部,另一侧可旋转地结合到所述第一区域。
13.所述多连杆部可以进一步包括第五连杆,其一侧固定到所述主体部,另一侧可旋转地结合到所述第三连杆的第三区域。
14.所述肌力辅助装置可以进一步包括:端部连杆部,其一侧可旋转地结合到所述主体部,另一侧结合到所述弹力提供部。
15.所述弹力提供部可以包括多个弹簧,所述多个弹簧的一侧可以分别结合到所述第二连杆的另一侧,所述多个弹簧的另一侧可以分别结合到所述端部连杆部的所述另一侧。
16.所述分布调节部可以包括第一齿轮,其一侧结合到所述第一连杆,并且被设置成能够相对于所述中心自转。
17.所述分布调节部可以进一步包括第二齿轮,其被设置成与所述第一齿轮啮合。
18.所述分布调节部可以进一步包括第三齿轮,其固定地结合到所述第一齿轮,并且被设置成能够相对于所述中心自转。
19.所述第一齿轮的尺寸可以大于所述第三齿轮的尺寸。
20.所述分布调节部可以进一步包括止挡件,通过与设置在所述第三齿轮的外侧的锯齿干涉来限制所述第三齿轮的旋转。
21.在所述第三齿轮的边缘中,在所述第一齿轮和所述第一连杆彼此结合的区域中可以设置有具有向所述中心方向凹陷的形状的凹陷部。
22.所述分布调节部可以包括:第一滑轮,其一侧结合到所述第一连杆,并且被设置成能够相对于所述中心自转;第二滑轮,被设置成与所述第一滑轮隔开;以及带,被设置成围绕所述第一滑轮和所述第二滑轮的外侧。
23.所述分布调节部可以进一步包括蜗杆,其被设置成与所述第一齿轮啮合。
24.本发明提供一种肌力辅助装置,包括:多连杆部,包括一个以上的连杆;分布调节部,与所述多连杆部的一侧结合并且被设置成一部分能够相对于中心自转;弹力提供部,与所述多连杆部的另一侧结合并且向所述多连杆部提供根据弹力的力;以及动力提供部,向所述分布调节部提供动力,当所述分布调节部的一部分通过所述动力提供部自转时,所述多连杆部的所述一侧能够相对于所述中心进行公转运动,所述分布调节部选择性地允许或限制所述多连杆部的所述一侧的运动。
25.所述多连杆部可以进一步包括:主体部,容纳所述多连杆部、所述分布调节部和所述弹力提供部;支撑部,设置在所述主体部的一侧;以及压力传感器,设置在所述支撑部的内侧面并且感测压力。
26.所肌力辅助装置可以进一步包括:控制部,根据施加到所述压力传感器的所述压力大小来控制所述动力提供部的驱动。
27.所述第一连杆可以具有朝向所述第四连杆弯曲的形状。
28.(三)有益效果
29.根据本发明,可以提供一种能够容易地改变扭矩分布的肌力辅助装置。
附图说明
30.图1是示意性地示出根据本发明的肌力辅助装置的结构的示意图。
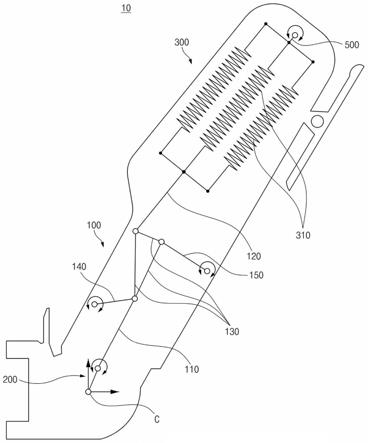
31.图2是示出根据本发明的第一实施例的肌力辅助装置的内部结构的图。
32.图3是示出根据本发明的第一实施例的肌力辅助装置中的第一主体和第二主体之间的旋转的各种驱动示例的图。
33.图4至图7是示出利用根据本发明的第一实施例的肌力辅助装置中的分布调节部来调节旋转力的分布的各种驱动示例的图。
34.图8是示出可以通过根据本发明的肌力辅助装置形成的各种旋转角度-旋转力函数关系的示例的曲线图。
35.图9是放大示出根据本发明的第二实施例的肌力辅助装置中的分布调节部的图。
36.图10是放大示出根据本发明的第三实施例的肌力辅助装置中的分布调节部的图。
37.图11是示出根据本发明的肌力辅助装置的另一示例的图。
38.图12是示出根据本发明的肌力辅助装置的又一示例的图。
39.附图标记说明
40.10:肌力辅助装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
100:多连杆部
41.110:第一连杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
120:第二连杆
42.130:第三连杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
140:第四连杆
43.150:第五连杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
200:分布调节部
44.210:第一齿轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
220:第二齿轮
45.230:第三齿轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
232:凹陷部
46.240:止挡件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
250:第一滑轮
47.260:第二滑轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
270:带
48.280:蜗杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
300:弹力提供部
49.310:弹簧
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
400:主体部
50.410:第一主体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
420:第二主体
51.500:端部连杆部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
600:动力提供部
52.700:支撑部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
710:压力传感器
53.c:中心
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
z1:第一区域
54.z2:第二区域
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
z3:第三区域
具体实施方式
55.以下,参照附图对根据本发明的肌力辅助装置进行说明。
56.肌力辅助装置
57.图1是示意性地示出根据本发明的肌力辅助装置的结构的示意图,图2是示出根据本发明的第一实施例的肌力辅助装置的内部结构的图。
58.如图1所示,根据本发明的肌力辅助装置10可以包括具有一个以上的连杆的多连杆部100。更详细地,多连杆部100可以包括多个连杆。更优选地,多连杆部100可以具有多个连杆可旋转地彼此连接的联动(linkage)结构。例如,设置在多连杆部100中的多个连杆可以在同一平面上可旋转地彼此连接。
59.此外,肌力辅助装置10可以包括分布(profile)调节部200,其与多连杆部100的一侧结合并且被设置成可以相对于中心c自转。更详细地,当分布调节部200的一部分相对于所述中心c自转时,多连杆部100的一侧可以固定地结合到所述分布调节部200的一部分,以使多连杆部100的所述一侧可以相对于中心c公转。将在后面描述分布调节部200的作用和结构。
60.同时,肌力辅助装置10可以进一步包括弹力提供部300,其与多连杆部100的另一侧结合,并且向多连杆部100提供根据弹力的力。更详细地,弹力提供部300可以包括弹簧310。更优选地,弹力提供部300可以包括多个弹簧310。图2示出了弹力提供部300由三个弹簧310组成的状态。
61.另一方面,参照图2,根据本发明的肌力辅助装置10可以进一步包括容纳多连杆部100、分布调节部200和弹力提供部300的主体部400。更详细地,主体部400可以包括:第一主体410,容纳多连杆部100、分布调节部200和弹力提供部300;以及第二主体420,可旋转地结合到第一主体410。例如,第一主体410和第二主体420可以彼此枢转地结合,以相对于所述中心c可以相对旋转。
62.例如,根据本发明的肌力辅助装置10可以安装在使用者的手臂和肩膀上,此时,肌力辅助装置10可以以使所述中心c面对手臂和肩膀相交的关节区域的方式安装,并且第一主体410可以安装在手臂上,第二主体420可以安装在肩膀上。
63.因此,根据本发明的肌力辅助装置10可以根据手臂的旋转角度来辅助使用者所需的肌力的作用。即,当第一主体410通过旋转手臂而相对于第二主体420围绕中心c枢转时,多连杆部100的所述另一侧和弹力提供部300之间的相对位置根据多个连杆被联动地结合的多连杆部100的结构而改变。因此,由于与多连杆部100的所述另一侧连接的弹力提供部300向多连杆部100提供的弹力也发生变化,因此可以根据使用者的手臂的旋转角度从中心c向使用者提供不同大小的旋转力。
64.因此,根据本发明的肌力辅助装置10向使用者提供的旋转力可以理解为根据第一主体410和第二主体420之间的旋转角度的函数关系。此外,根据本发明的肌力辅助装置可以仅通过简单的操作而使根据第一主体410和第二主体420之间的旋转角度的旋转力具有各种类型的函数关系,而无需更换单独的部件等繁琐的工作。因此,可以向想要使用肌力辅助装置的使用者分别提供优化的旋转力。
65.为实现上述目的,根据本发明的肌力辅助装置10的分布(profile)调节部200可以选择性地允许或限制多连杆部100的所述一侧的公转运动。以下,描述用于实现上述目的的根据本发明的肌力辅助装置10的多连杆部100和分布调节部200的详细构造。
66.如图1和图2所示,多连杆部100可以包括第一连杆110,其一侧结合到分布调节部200;以及第二连杆120,其一侧结合到弹力提供部300。
67.同时,多连杆部100进一步包括第三连杆130,其中第一区域z1可旋转地结合到第一连杆110的另一侧,第二区域z2可旋转地结合到第二连杆120的另一侧。即,上述第一连杆至第三连杆110、120、130可以在主体部400内相对于主体部400相对移动。
68.参照图1和图2,多连杆部100可以进一步包括第四连杆140,其一侧固定到主体部400,另一侧可旋转地结合到第三连杆130的第一区域z1。更详细地,第四连杆140的所述一侧可以固定地结合到第一主体410的内侧。因此,在第一区域z1中,第一连杆110、第三连杆
130和第四连杆140可以结合在一起。同时,如图2所示,第一连杆110可以具有朝向第四连杆140弯曲的形状,但是第一连杆110的具体形状不限于图2所示的形状。
69.此外,多连杆部100进一步包括第五连杆150,其一侧固定到主体部400,另一侧可旋转地结合到第三连杆130的第三区域z3。更详细地,第五连杆150的所述一侧可以固定地结合到第一主体410的内侧。同时,如上所述,第三连杆130可以包括第一区域至第三区域z1、z2、z3。更详细地,如图2所示,第三连杆130可以在其拐角部分具有第一区域至第三区域z1、z2、z3并且中间区域是空的形状。
70.另一方面,参照图2,根据本发明的第一实施例,分布调节部200可以包括:第一齿轮210,其一侧结合到第一连杆110并且可旋转地结合到中心c;以及第二齿轮220,被设置成与第一齿轮210啮合。因此,当第二齿轮220自转时,与第二齿轮220啮合的第一齿轮210可以围绕中心c自转。
71.此外,分布调节部200可以进一步包括第三齿轮230,该第三齿轮230固定地结合到第一齿轮210并且被设置成可以相对于中心c自转。即,根据本发明的第一实施例,由于第一齿轮210和第三齿轮230彼此固定,所以可以相对于中心c一体地自转。更详细地,第一齿轮210的外径尺寸可以大于第三齿轮230的外径尺寸。
72.参照图2,分布调节部200可以进一步包括止挡件240,通过与设置在第三齿轮230的外侧的锯齿干涉来限制第三齿轮230的旋转。
73.基于上述内容,以下将对根据本发明的第一实施例的肌力辅助装置10的操作方法进行说明。
74.图3是示出根据本发明的第一实施例的肌力辅助装置中的第一主体和第二主体之间的旋转的各种驱动示例的图。
75.如图3所示,即使当第一主体410根据佩戴肌力辅助装置10的使用者的运动而相对于第二主体420相对旋转时,第一连杆110中的结合到第一齿轮210的区域也相对于第一主体410固定。这可能是因为设置在分布调节部中的止挡件240与第三齿轮230的锯齿干涉,从而限制第三齿轮230和固定地结合到第三齿轮230的第一齿轮210的旋转。另一方面,即使第一连杆110的一侧固定到第一齿轮210,多连杆部100内的其他连杆也根据第一主体410相对于第二主体420的旋转而相对于第一主体410进行相对移动。因此,弹力提供部300向第二连杆120或多连杆部100提供的弹力也可能改变,结果,肌力辅助装置10向使用者提供的旋转力也可能根据第一主体410相对于第二主体420的旋转角度而改变。例如,图3左侧所示的肌力辅助装置10示出了佩戴肌力辅助装置的使用者向上方抬起手臂时的状态,图3中央所示的肌力辅助装置10示出了使用者在水平方向上抬起手臂时的状态,图3右侧所示的肌力辅助装置10示出了使用者向下方放下手臂时的状态。此时,参照上述内容,在根据本发明的肌力辅助装置10中,使用者向上方抬起手臂时肌力辅助装置形成的旋转力、使用者在水平方向上抬起手臂时肌力辅助装置形成的旋转力以及使用者向下方放下手臂时肌力辅助装置形成的旋转力可能彼此不同。特别地,如稍后将描述的,根据本发明,即使使用者抬起手臂的角度相同,由肌力辅助装置形成的旋转力也可能因分布调节部的操纵而不同。
76.图4至图7是示出利用根据本发明的第一实施例的肌力辅助装置中的分布调节部来调节旋转力的分布的各种驱动示例的图。
77.参照图4至图7,当使用者操纵止挡件240以解除止挡件240与第三齿轮230之间的
干涉后旋转第二齿轮220时,与第二齿轮220固定地结合的第一齿轮210相对于中心c自转。此时,由于第一齿轮210与第一连杆110的一侧固定地结合,所以第一连杆110的一侧也相对于中心c公转。由于第一齿轮210的一侧相对于中心c公转,因此第二连杆120和弹力提供部300之间的相对位置根据多连杆部100内的连杆之间的结合结构而改变。因此,如图4至图7所示,即使第一主体410和第二主体420之间的旋转角度不变,肌力辅助装置在中心c处施加到使用者的旋转力也可能改变。因此,根据本发明,可以向想要使用肌力辅助装置的使用者提供优化的旋转力。
78.图8是示出可以通过根据本发明的肌力辅助装置形成的各种旋转角度-旋转力函数关系的示例的曲线图。
79.图8的x轴表示第一主体410和第二主体420之间的旋转角度,y轴表示肌力辅助装置向使用者提供的旋转力的大小。如图8所示,当初始位置(initial position)设置的旋转角度和旋转力之间的关系不符合使用者要求时,通过第二齿轮220旋转第一齿轮210,可以沿着x轴在水平方向上平移图8的曲线图。
80.例如,在20度至30度的旋转角度范围内将向使用者提供的旋转力调节至最大(参照图8的初始位置所示的曲线图)的肌力辅助装置的第一齿轮210进行旋转,可以调节肌力辅助装置的旋转力,使得向使用者提供的旋转力在-10度至0度的旋转角度范围内变为最大(参照图8的i所示的曲线图)。
81.综上所述,根据本发明,通过分布调节部200,即第一齿轮210自转,第一连杆110的一侧相对于中心c进行公转运动,因此,第二连杆120的一侧也移动,所以弹力提供部300施加到多连杆部100的力可以改变。特别地,根据本发明,即使在第一主体410和第二主体420之间的旋转角度保持原样的状态下,第一连杆110的一侧也可以相对于中心c进行公转运动,因此,即使使用者的手臂的旋转角度相同,也可以调节旋转角度和旋转力之间的关系,使得肌力辅助装置向使用者提供的旋转力可以彼此不同。
82.再次参照图2,根据本发明的肌力辅助装置10可以进一步包括端部连杆部500,其一侧可旋转地结合到主体部400,另一侧结合到弹力提供部300,即弹簧310。此时,设置在弹力提供部300中的多个弹簧310的一侧可以分别结合到第二连杆120的所述另一侧。
83.另外,如图2所示,根据本发明,在第三齿轮230的边缘中,在第一齿轮210和第一连杆110彼此结合的区域中可以设置有具有向中心c方向凹陷的形状的凹陷部232。凹陷部232可以被构造成用于防止第三齿轮230在第一齿轮210和第一连杆110之间的结合区域中干涉。
84.另一方面,止挡件240的一部分可以朝向第三齿轮230向前移动或向后移动以与设置在第三齿轮230的边缘的锯齿干涉或与锯齿隔开,从而可以控制是否与第三齿轮230干涉。
85.图9是放大示出根据本发明的第二实施例的肌力辅助装置中的分布调节部的图。在下文中,将以与本发明的第一实施例的不同之处为主来描述根据本发明的第二实施例的肌力辅助装置。
86.如图9所示,根据本发明的第二实施例,分布调节部200可以包括:第一滑轮250,其一侧结合到第一连杆110并且被设置成可以相对于中心c自转;第二滑轮260,被设置成与第一滑轮250隔开;以及带270,被设置成围绕第一滑轮250和第二滑轮260的外侧。
87.根据本发明的第二实施例,使用者可以通过旋转第二滑轮260来移动带270以旋转第一滑轮250,从而可以调节上述旋转角度和旋转力之间的关系。包括凹陷部232的其他部件的内容以及肌力辅助装置的工作原理以本发明第一实施例的上述内容代替。
88.图10是放大示出根据本发明的第三实施例的肌力辅助装置中的分布调节部的图。
89.如图10所示,根据本发明的第三实施例,分布调节部200可以包括第一齿轮210和蜗杆280,该蜗杆280被设置成与第一齿轮210啮合。
90.根据本发明的第三实施例,使用者可以通过旋转蜗杆280来旋转第一齿轮210,因此,可以调节上述旋转角度和旋转力之间的关系。包括凹陷部232的其他部件的内容以及肌力辅助装置的工作原理以本发明第一实施例的上述内容代替。
91.图11是示出根据本发明的肌力辅助装置的另一示例的图。
92.根据本发明的肌力辅助装置的旋转力的调节可以手动执行,但可以使用单独的动力源自动执行。例如,根据本发明第一实施例的第二齿轮220(参照图2)、根据本发明的第二实施例的第二滑轮260(参照图9)和根据本发明的第三实施例的蜗杆280(参照图10)的驱动可以由使用者手动执行,但可以使用单独的动力源自动执行。
93.更具体地,参照图11,根据本发明的肌力辅助装置10可以进一步包括向分布调节部200(参照图1等)提供动力的动力提供部600。更详细地,动力提供部600可以进一步包括向设置在分布调节部中的第二齿轮220(参照图2)、第二滑轮260(参照图9)或蜗杆280(参照图10)提供旋转力的动力提供部600。例如,动力提供部600可以是电动机,但是也可以在动力提供部中应用各种类型的动力源。根据本发明的另一示例,当分布调节部200(参照图1等)中的一部分通过动力提供部600自转时,多连杆部100(图1等)的一侧可以被设置成可以相对于所述中心进行公转运动。
94.图12是示出根据本发明的肌力辅助装置的又一示例的图。
95.如图12所示,根据本发明的肌力辅助装置10可以进一步包括设置在主体部400的一侧的支撑部700。支撑部700可以是支撑使用者的手臂的构造。
96.此外,肌力辅助装置10可以进一步包括压力传感器710,所述压力传感器设置在支撑部700的内侧面并感测压力。如上所述,由于支撑部700可以是支撑使用者的手臂的构造,因此压力传感器710可以测量由使用者的手臂施加的压力。因此,压力传感器710可以在工作过程中实时测量施加到使用者手臂的载荷。
97.同时,肌力辅助装置10可以进一步包括根据施加到压力传感器710的压力大小来控制动力提供部的驱动的控制部(未示出)。因此,根据本发明,压力传感器710可以在实时测量施加到使用者手臂的载荷后将与其相关的信息发送到控制部,控制部可以基于关于载荷的信息来控制动力提供部600的驱动以实时调节使用者所需的旋转力。
98.尽管上文通过有限的实施例和附图描述了本发明,但本发明并不限于此,当然,本发明所属技术领域的普通技术人员可以在本发明的技术思想和所附权利要求书的等同范围内进行各种实施。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
