1.本发明属于天地物资转运仓储技术领域,特别是涉及一种穿梭小车循环式密集货箱系统。
背景技术:
2.随着我国空间站领域的不断发展,空间站的在轨任务不断复杂化,提出了更长在轨时间的要求。更长的在轨时间意味着空间站需要储备更多数量、更多种类的在轨物资以保证航天员的正常工作乃至整个空间站的正常运行,对于空间站在轨期间物资管理、投取的自动化和智能化要求也越来越高。开发面向空间站的智能仓储管理系统是实现该目标的有效途径,而货物舱体积装载率、物资取用定位准确性以及系统结构的可靠性是评判一个空间站智能仓储管理系统实用性的重要参数。因此,设计一种体积装载率大,物资取用定位准确率高,系统结构简单,可靠性高的智能货箱系统可以有效的提升对空间物资进行自动化管理的能力和效率,具有十分迫切的需求。
技术实现要素:
3.有鉴于此,本发明旨在提出一种穿梭小车循环式密集货箱系统,以提升空间物资自动化管理的能力和效率。
4.为实现上述目的,本发明采用以下技术方案:一种穿梭小车循环式密集货箱系统,它包括货包部分、货箱基体、第一货箱前端锁紧部分、第二货箱前端锁紧部分、货箱后端锁紧部分、货箱顶部锁紧部分和穿梭车,所述货包部分安放在货箱基体的内部,所述第一货箱前端锁紧部分和第二货箱前端锁紧部分均与货箱基体的前端相连,所述货箱后端锁紧部分与货箱基体的后端相连,所述货箱顶部锁紧部分与货箱基体的顶端相连,所述穿梭车安放在货箱基体上。
5.更进一步的,所述货包部分包括货包本体、第一货包限位部分和第二货包限位部分,所述第一货包限位部分数量为四个,四个第一货包限位部分分别通过螺钉安装在货包本体上表面四角,所述第二货包限位部分数量为四个,四个第二货包限位部分分别通过螺钉安装在货包本体下表面四角。
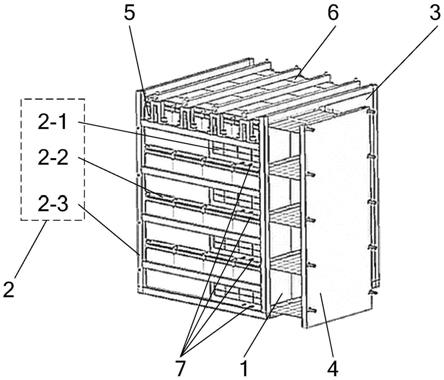
6.更进一步的,所述货箱基体包括太阳能板、中间层部分和外框部分,所述外框部分与中间层部分固定连接,所述太阳能板固定连接在外框部分上。
7.更进一步的,所述中间层部分包括中间层和导向部分,所述导向部分一端与中间层相连,另一端与外框部分相连。
8.更进一步的,所述中间层上开设有多个导槽。
9.更进一步的,所述导向部分包括导向弹簧、导向螺母和导向杆,所述导向杆一端与中间层相连,另一端通过导向螺母将导向杆和外框部分相连,所述导向弹簧套装在导向杆上。
10.更进一步的,所述第二货箱前端锁紧部分上设置有第一解锁器,所述第一解锁器
数量为十个,十个第一解锁器均匀分布在第二货箱前端锁紧部分的外表面边缘上,所述第二货箱前端锁紧部分通过第一解锁器与货箱基体相连。
11.更进一步的,所述第二货箱前端锁紧部分上设置有铰链部分,所述铰链部分一端安装在货箱基体上,另一端安装在第二货箱前端锁紧部分的内表面,所述铰链部分上设置有导程槽,所述铰链部分下面安装有丝杆。
12.更进一步的,所述第二货箱前端锁紧部分侧面安装有展开限位部分。
13.更进一步的,所述货箱顶部锁紧部分包括支撑架和第二解锁器,所述支撑架与中间层和外框部分相连,所述支撑架包括两个部分,两个部分之间通过第二解锁器连接在一起。
14.与现有技术相比,本发明的有益效果是:本发明旨在提出一种穿梭小车循环式智能仓储系统结构及其工作方法,具有结构简单、工作空间小、工作可靠等特点,满足空间货物运输要求。
15.在设计上,本发明采用标准化设计思路,对外采用标准通用接口,内部按需装载物资布置。所有物资在系统内部采用标准模块化结构装载,货包采用单元等体积立方体进行模型设计。具有良好的设计性和维修性。
16.在装载效率上,相对于已有的货箱系统,本发明的货箱体积装载率高,装载率可达85%以上。
17.在方案上,本发明充分考虑了发射过程中的振动问题,在发射前对货包进行了可靠的竖直和水平方向上的预紧,保证了本发明在发射过程中的可靠性。
附图说明
18.构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
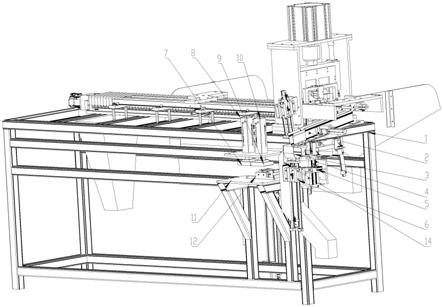
19.图1为本发明所述的一种穿梭小车循环式密集货箱系统整体结构示意图;
20.图2为本发明所述的货包部分结构示意图;
21.图3为本发明所述的中间层部分结构示意图;
22.图4为本发明所述的第二货箱前端锁紧部分整体结构示意图;
23.图5为本发明所述的第二货箱前端锁紧部分侧面结构示意图;
24.图6为本发明所述的第二货箱前端锁紧部分侧面压缩状态示意图;
25.图7为本发明所述的货箱顶部锁紧部分结构示意图;
26.图8为本发明所述的一种穿梭小车循环式密集货箱系统的货包编号示意图;
27.图9为本发明所述的一种穿梭小车循环式密集货箱系统货包装运过程状态示意图1;
28.图10为本发明所述的一种穿梭小车循环式密集货箱系统货包装运过程状态示意图2。
29.1:货包部分,101:货包本体,102:第一货包限位部分,103:第二货包限位部分,2:货箱基体,2-1:太阳能板,2-2:中间层部分,2-3:外框部分,201:中间层,202:导向部分,203:导向弹簧,204:导向螺母,205:导向杆,206:导槽,3:第一货箱前端锁紧部分,4:第二货箱前端锁紧部分,401:第一解锁器,402:丝杆,403:铰链部分,404:展开限位部分,405:导程
槽,5:货箱后端锁紧部分,6:货箱顶部锁紧部分,601:支撑架,602:第二解锁器,7:穿梭车。
具体实施方式
30.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地阐述。需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
31.参见图1-10说明本实施方式,一种穿梭小车循环式密集货箱系统,它包括货包部分1、货箱基体2、第一货箱前端锁紧部分3、第二货箱前端锁紧部分4、货箱后端锁紧部分5、货箱顶部锁紧部分6和穿梭车7,货包部分1安放在货箱基体2的内部,第一货箱前端锁紧部分3和第二货箱前端锁紧部分4均与货箱基体2的前端相连,货箱后端锁紧部分5与货箱基体2的后端相连,货箱顶部锁紧部分6与货箱基体2的顶端相连,穿梭车7安放在货箱基体2上,可带动货包移动。
32.货包部分1包括货包本体101、第一货包限位部分102和第二货包限位部分103,第一货包限位部分102数量为四个,四个第一货包限位部分102分别通过螺钉安装在货包本体101上表面四角,第二货包限位部分103数量为四个,四个第二货包限位部分103分别通过螺钉安装在货包本体101下表面四角。
33.货箱基体2包括太阳能板2-1、中间层部分2-2和外框部分2-3,外框部分2-3与中间层部分2-2固定连接,太阳能板2-1固定连接在外框部分2-3上。中间层部分2-2包括中间层201和导向部分202,导向部分202一端与中间层201相连,另一端与外框部分2-3相连。导向部分202包括导向弹簧203、导向螺母204和导向杆205,导向杆205一端与中间层201相连,另一端通过导向螺母204将导向杆205和外框部分2-3相连,导向弹簧203套装在导向杆205上。如果给中间层201一定的力,导向部分202的导向弹簧203会被压缩,从而实现中间层201沿着导向杆205方向的移动。太阳能板2-1为穿梭车7提供充电电源。中间层201上开设有多个导槽206。穿梭车7沿导槽206对货物进行转移。
34.第二货箱前端锁紧部分4上设置有第一解锁器401,第一解锁器401数量为十个,十个第一解锁器401均匀分布在第二货箱前端锁紧部分4的外表面边缘上,第二货箱前端锁紧部分4通过第一解锁器401与货箱基体2相连。第二货箱前端锁紧部分4上设置有铰链部分403,铰链部分403一端安装在货箱基体2上,另一端安装在第二货箱前端锁紧部分4的内表面,铰链部分403上设置有导程槽405,铰链部分403下面安装有丝杆402。铰链部分403在第二货箱前端锁紧部分4锁紧状态下呈折叠状态,在第二货箱前端锁紧部分4解锁后可展开为平面。导程槽405为穿梭车7和货包部分1的移动提供导向。丝杆402起导向作用。第二货箱前端锁紧部分4侧面安装有展开限位部分404,防止货箱前端锁紧部分打开后,货包从另一面飞出。
35.货箱顶部锁紧部分6包括支撑架601和第二解锁器602,支撑架601通过焊接的方式与中间层201固定在一起,通过螺钉与外框部分2-3固定为一体,支撑架601包括两个部分,两个部分之间通过第二解锁器602连接在一起,并可通过第二解锁器602进行预紧。
36.在存取特定层的特定货物时,第二货箱前端锁紧部分4中的第一解锁器401解锁,第二货箱前端锁紧部分4沿丝杆402向外运动一定长度,第二货箱前端锁紧部分4的铰链部分403展开为平面,接着对应层的穿梭车7解锁,穿梭车7沿该层中间层201的导槽206对货物
进行转移,将货物转移至铰链部分403,对货包进行存取。
37.具体工作过程包括以下步骤:
38.步骤1:在空间站发射过程中,货包部分1存放在货箱基体2中,第一货箱前端锁紧部分3和货箱后端锁紧部分5固连在货箱基体2上,第二货箱前端锁紧部分4通过第一解锁器401连接在货箱基体2上,并且通过第一解锁器401在水平方向上适当压缩并锁紧,货箱顶部锁紧部分6通过第二解锁器602连接在货箱基体2上,并且通过第二解锁器602在竖直方向上适当压缩并锁紧,将货包部分1一并锁紧;
39.步骤2:当空间站达到预定轨道后,货箱顶部锁紧部分6的第二解锁器602解锁,货箱基体2在竖直方向恢复,中间层部分2-2在导向弹簧203的作用下沿导向杆205恢复,在存取特定层的特定货物时,第二货箱前端锁紧部分4中的第一解锁器401解锁,第二货箱前端锁紧部分4沿丝杆402方向向外运动一定长度,第二货箱前端锁紧部分4的铰链部分403展开为平面,之后,对应中间层201的穿梭车7解锁,穿梭车7沿该层中间层201的导槽206对货物进行转移,将货物转移至出口部分,最终移动到铰链部分403,对货包进行存取。
40.系统货包循环工作原理为:
41.为了叙述方便,将货包进行编号,如图8货包编号示意图所示。以货包
⑨
为例,在轨时,若要将货包
⑨
转移至货包
④
的位置并存取操作的过程为:
42.步骤1:第二货箱前端锁紧部分4解锁并运动一定的长度,此时穿梭车7解锁,将货包
⑧
沿-x方向移动长度。如图9所示
43.步骤2:在图9基础上,以货包
④
和货包
⑨
的中心连线作为对角线,x方向和y方向货包的连线为边构成长方形,随后穿梭车7逐个转移货包,直到货包
⑨
到达铰链部分403。如图10所示。
44.步骤3:随后对铰链部分403上的货包
⑨
进行存取。
45.以上公开的本发明实施例只是用于帮助阐述本发明。实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。