1.本发明涉及智慧交通技术领域,具体涉及一种可控智能自调节助力仿生飞翼装置。
背景技术:
2.单人飞行器的出现具有很重要的现实意义。陆路交通的压力是人所共知的,特别是在北京等人口密集的城市,堵车是家常便饭,要解决这些问题困难重重。所以,通过研发一些单人飞行的空气动力飞行器可以有效解决这些难题。目前,市面上的单人飞行器有很多种,比如单旋翼飞行器、双旋翼飞行器、多旋翼飞行器和喷气式飞行器,它们主要以旋翼或喷气为主要升力来源,十分浪费能源,并且污染环境。
3.因此,亟需一种能够实现助力飞行且能提升交通效率,减缓道路交通压力的飞行装置。
技术实现要素:
4.针对上述存在的技术不足,本发明的目的是提供一种可控智能自调节助力仿生飞翼装置,其通过主骨架和设置于主骨架上的动力控制装置和转向控制装置,控制与主骨架连接的主动翅面的振动频率和控向边翼的开合,从而实现仿生飞行动作,助力飞行,减少能源使用的同时也提升了交通效率,减缓了道路交通的压力。
5.为解决上述技术问题,本发明采用如下技术方案:
6.本发明提供一种可控智能自调节助力仿生飞翼装置,包括,
7.主骨架,所述主骨架上设置有人体固定装置、动力控制装置和转向控制装置;
8.主动翅面,对称连接在所述主骨架的两侧;
9.控向边翼,与所述主动翅面连接;
10.所述动力控制装置和所述转向控制装置分别通过控制主动翅面的震动频率和控向边翼的开合来对应控制飞翼装置的飞行速度和方向。
11.优选地,还包括与所述主动翅面连接的被动翅面,当主动翅面向下运动时,被动翅面处于向外伸展状态,当主动翅面向上抬起时,被动翅面处于向下收缩状态。
12.优选地,所述主动翅面与所述主骨架之间和所述被动翅面与所述主动翅面之间均通过联接铰链连接。
13.优选地,所述人体固定装置包括与主骨架连接的用于固定上臂的固定带、用于固定上身的绑定带和用于固定膝盖和/或腿的开口勾件。
14.优选地,所述主骨架的尾部设置有用于平衡机身运动的凤尾飘带。
15.优选地,所述动力控制装置包括与中央处理器连接的动作数据传感器、动力控制手柄、主翅动力源,所述主翅动力源通过收缩杆与所述主动翅面连接,中央处理器根据动作数据传感器采集到的动力控制手柄动作数据控制所述主翅动力源的输出功率。
16.优选地,所述转向控制装置包括与中央处理器连接的转向控制器、转向控制手柄、
边翼动力源,所述边翼动力源通过连杆与所述控向边翼连接,中央处理器根据转向控制手柄对转向控制器发出的指令控制所述边翼动力源的工作。
17.本发明的有益效果在于:
18.(1)本发明采用仿生设计,与主骨架连接的主动翅面还连接有被动翅面,当主动翅面上下运动时,被动翅面随之伸缩,从而实现仿生助力飞行以增加飞翼的升力,实现飞翼的载重飞行的同时还节约了能源。
19.(2)本发明飞翼的主骨架上设置的动力控制装置通过对主动翅面上下运动的频率进行控制,从而控制飞翼的飞行速度。
20.(3)本发明飞翼的主骨架上设置有转向控制装置,主动翅面的两侧上接有可动控向边翼,通过转向控制装置控制两侧可动控向边翼的开合,以达到飞翼转向控制。
附图说明
21.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
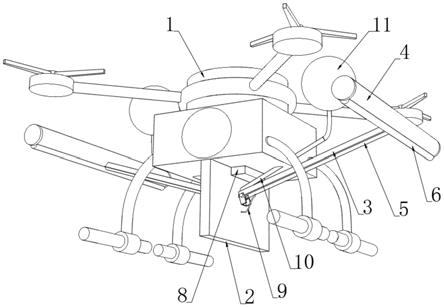
22.图1为本发明实施例提供的一种可控智能自调节助力仿生飞翼装置的结构连接示意图;
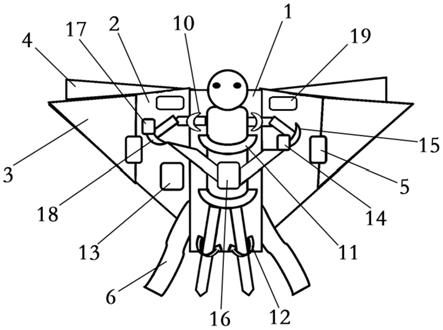
23.图2为本发明实施例提供的一种可控智能自调节助力仿生飞翼装置的内部硬件连接结构示意图。
24.附图标记说明:
25.1-主骨架,10-固定带,11-绑定带,12-开口勾件,13-中央处理器,14-动作数据传感器,15-动力控制手柄,16-主翅动力源,17-转向控制器,18-转向控制手柄,19-边翼动力源,2-主动翅面,3-被动翅面,4-控向边翼,5-联接铰链,6-凤尾飘带。
具体实施方式
26.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
27.实施例
28.如图1和图2所示,本发明提供了一种可控智能自调节助力仿生飞翼装置,包括,
29.主骨架1,主骨架1上设置有用于固定人体的人体固定装置;
30.主动翅面2,与主骨架1连接,主骨架1上设置有动力控制装置;
31.控向边翼4,与主动翅面2连接,主骨架1上设置有转向控制装置;
32.动力控制装置和转向控制装置分别通过控制主动翅面2的震动频率和控向边翼4的开合来对应控制飞翼装置的飞行速度和方向。
33.其中,所述动力控制装置和所述转向控制装置内均设置有控制器,可通过手动操作控制两个控制装置的工作,进而实现控制飞翼装置的飞行速度和方向。本发明通过上述
部件的合理配合可实现仿生飞行动作,从而实现助力飞行,有效提升交通效率,减缓道路交通的压力。
34.本发明提供的飞翼装置还包括与主动翅面2连接的被动翅面3,当主动翅面2向下运动时,被动翅面3处于向外伸展状态,当主动翅面2向上抬起时,被动翅面3处于向下收缩状态。具体的,当主动翅面2向上抬起时,被动翅面3是向下收的,以减小主动翅面2上扬时的阻力,当主动翅面2向下运动时,被动翅面3是伸展的,以增加飞翼的升力。被动翅面3对主动翅面2的配合运动就像飞鸟振翅时的动作相仿,从而给飞翼带来净升力,实现飞翼的载重飞行。
35.主动翅面2与主骨架1之间和被动翅面3与主动翅面2之间均通过联接铰链5连接。
36.作为本发明的一种优选的实施方式,人体固定装置包括与主骨架1连接的用于固定上臂的固定带10、用于固定上身的绑定带11和用于固定膝盖和/或腿的开口勾件12。
37.作为本发明的一种优选的实施方式,主骨架1的尾部设置有用于平衡机身运动的凤尾飘带6。
38.为控制飞翼行进时的速度,动力控制装置包括中央处理器13和与中央处理器13连接的动作数据传感器14、动力控制手柄15、主翅动力源16,主翅动力源16通过收缩杆与主动翅面2连接,中央处理器13根据动作数据传感器14对动力控制手柄15采集到的动作数据控制主翅动力源16的输出功率。
39.具体的,所述动力控制手柄15和所述动作数据传感器14设置于一侧手掌放置处,用于感知手部力量,动作数据传感器14将手部力量大小信号传递给中央处理器13,中央处理器13指挥主翅动力源16的运转速度,主翅动力源16通过收缩杆与主动翅面2连接,主动翅面2在收缩杆的收缩作用下做振翅运动。手部力量越大,主翅动力源16的运转速度越快,从而使得主动翅面2的振翅频率越高,飞翼速度越快。
40.为控制飞翼行进时的方向,转向控制装置包括中央处理器13和与中央处理器13连接的转向控制器17、转向控制手柄18、边翼动力源19,边翼动力源19通过连杆与控向边翼4连接,中央处理器13根据转向控制手柄18对转向控制器17发出的指令控制边翼动力源19的工作。
41.具体的,所述转向控制手柄18和所述转向控制器17设置于另一侧手掌放置处,转向控制器17接收转向控制手柄18的控制命令并将控制命令传递给中央处理器13,中央处理器13控制边翼动力源19的运转,通过调节左、右控向边翼4的不对称开、合,从而实现飞翼的转向。其中,转向控制手柄18上设置有左右调节控向边翼4的两个按钮,按下左按钮,左控向边翼开,按下右按钮,右控向边翼开。
42.使用时,执行人先把自己通过固定带10和绑定带11与飞翼固定在一起,双脚着地,并向下倾斜身体,然后一侧手掌扶着转向控制手柄18,另一侧手掌握住动力控制手柄15,动作数据传感器14将信号发送至中央处理器13,中央处理器13指挥主动翅面2动力源由慢到快带动主动翅面2振动,主动翅面2再带动被动翅面3一起振动,实现飞翼的起飞。待飞翼起飞后,将双腿岔开并放置在开口勾件12上。此时可以根据需要用靠近转向控制手柄18的手通过调节左、右控向边翼4的不对称开合实现飞翼的转向。
43.显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围
之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。