技术特征:
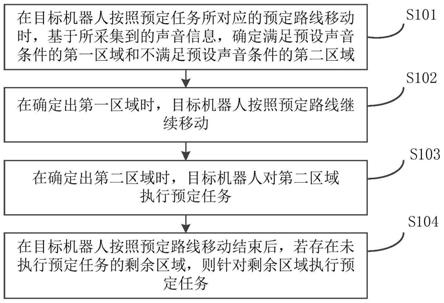
1.一种机器人控制方法,其特征在于,所述方法包括:在目标机器人按照预定任务所对应的预定路线移动时,基于所采集到的声音信息,确定满足预设声音条件的第一区域和不满足所述预设声音条件的第二区域;在确定出所述第一区域时,所述目标机器人按照所述预定路线继续移动;在确定出所述第二区域时,所述目标机器人对所述第二区域执行所述预定任务;在所述目标机器人按照所述预定路线移动结束后,若存在未执行所述预定任务的剩余区域,则针对所述剩余区域执行所述预定任务。2.根据权利要求1所述的方法,其特征在于,所述预设声音条件包括:基于所采集到的声音信息确定的声音能量大于能量阈值,且基于所采集到的声音信息确定的声源为多个。3.根据权利要求2所述的方法,其特征在于,所述基于所采集到的声音信息,确定满足预设声音条件的第一区域和不满足所述预设声音条件的第二区域,包括:若基于所采集到的声音信息确定的声音能量不大于所述能量阈值,则基于所述目标机器人所在的第一位置,确定第二区域;若基于所采集到的声音信息确定的声音能量大于所述能量阈值,则进行声源探测;如果探测到多个声源,则确定所述第一位置的第一方位角,并移动所述目标机器人至第二位置,确定所述第二位置的第二方位角;确定第一射线和第二射线的交点,并基于所述交点,确定第一区域;其中,所述第一射线为:以所述第一位置为起点,且向所述第一方位角所指示的方向延伸的射线,所述第二射线为:以所述第二位置为起点,且向所述第二方位角所指示的方向延伸的射线;否则,则基于所述第一位置,确定第二区域。4.根据权利要求3所述的方法,其特征在于,所述基于所述交点,确定第一区域,包括:将与所述交点的距离在第二距离以内的区域确定为第一区域;或者,从预设的关于位置信息和房间的对应关系中,查找所述交点的位置信息所对应的第一房间,作为第一区域。5.根据权利要求3所述的方法,其特征在于,所述基于所述目标机器人所在的第一位置,确定第二区域,包括:将与所述目标机器人所在的第一位置的距离为第一距离以内的区域确定为第二区域;或者,从预设的关于位置信息和房间的对应关系中,查找所述第一位置的位置信息所对应的第二房间,作为第二区域。6.根据权利要求1所述的方法,其特征在于,所述若存在未执行所述预定任务的剩余区域,则针对所述剩余区域执行所述预定任务,包括:若未执行所述预定任务的剩余区域满足所述预设声音条件,则降低所述目标机器人的任务执行参数,并对所述剩余区域执行所述预定任务;若未执行所述预定任务的剩余区域不满足所述预设声音条件,则对所述剩余区域执行所述预定任务。7.根据权利要求1所述的方法,其特征在于,所述对所述剩余区域执行所述预定任务,包括:
按照基于所采集到的声音信息确定的声音能量由小到大的顺序,依次针对所述剩余区域中的各个子区域执行所述预定任务。8.根据权利要求1所述的方法,其特征在于,在所述在目标机器人按照预定任务所对应的预定路线移动时,基于所采集到的声音信息,确定满足预设声音条件的第一区域和不满足所述预设声音条件的第二区域之前,所述方法还包括:接收用于指示目标机器人执行预定任务的任务指令,并确定所述任务指令所指示的预定路线,作为所述预定任务所对应的预定路线。9.根据权利要求1-8任一项所述的方法,其特征在于,所述目标机器人为清洁目标机器人,所述预定任务为清洁任务。10.一种机器人系统,其特征在于,所述系统包括:声音采集模块,用于在目标机器人按照预定任务所对应的预定路线移动时,实时采集声音信息;处理器,用于基于所采集到的声音信息,确定满足预设声音条件的第一区域和不满足所述预设声音条件的第二区域;在确定出所述第一区域时,所述目标机器人按照所述预定路线继续移动;在确定出所述第二区域时,所述目标机器人对所述第二区域执行所述预定任务;在所述目标机器人按照所述预定路线移动结束后,若存在未执行所述预定任务的剩余区域,则针对所述剩余区域执行所述预定任务。11.根据权利要求10所述的系统,其特征在于,所述预设声音条件包括:基于所采集到的声音信息确定的声音能量大于能量阈值,且基于所采集到的声音信息确定的声源为多个。12.根据权利要求11所述的系统,其特征在于,所述处理器具体用于:若基于所采集到的声音信息确定的声音能量不大于所述能量阈值,则基于所述目标机器人所在的第一位置,确定第二区域;若基于所采集到的声音信息确定的声音能量大于所述能量阈值,则进行声源探测;如果探测到多个声源,则确定所述第一位置的第一方位角,并移动所述目标机器人至第二位置,确定所述第二位置的第二方位角;确定第一射线和第二射线的交点;其中,所述第一射线为:以所述第一位置为起点,且向所述第一方位角所指示的方向延伸的射线,所述第二射线为:以所述第二位置为起点,且向所述第二方位角所指示的方向延伸的射线;否则,基于所述第一位置,确定第二区域。13.根据权利要求12所述的系统,其特征在于,所述处理器具体用于:将与所述交点的距离在第二距离以内的区域确定为第一区域;或者,从预设的关于位置信息和房间的对应关系中,查找所述交点的位置信息所对应的第一房间,作为第一区域。14.根据权利要求12所述的系统,其特征在于,所述处理器具体用于:将与所述目标机器人所在的第一位置的距离为第一距离以内的区域确定为第二区域;或者,从预设的关于位置信息和房间的对应关系中,查找所述第一位置的位置信息所对应的第二房间,作为第二区域。15.根据权利要求10所述的系统,其特征在于,所述处理器具体用于:若未执行所述预定任务的剩余区域满足所述预设声音条件,则降低所述目标机器人的任务执行参数,并对所述剩余区域执行所述预定任务;
若未执行所述预定任务的剩余区域不满足所述预设声音条件,则对所述剩余区域执行所述预定任务。16.根据权利要求10所述的系统,其特征在于,所述处理器具体用于:按照基于所采集到的声音信息确定的声音能量由小到大的顺序,依次针对所述剩余区域中的各个子区域执行所述预定任务。17.根据权利要求10所述的系统,其特征在于,所述处理器具体用于:在所述在目标机器人按照预定任务所对应的预定路线移动时,基于所采集到的声音信息,确定满足预设声音条件的第一区域和不满足所述预设声音条件的第二区域之前,接收用于指示目标机器人执行预定任务的任务指令,并确定所述任务指令所指示的预定路线,作为所述预定任务所对应的预定路线。18.根据权利要求10-17任一项所述的系统,其特征在于,所述目标机器人为清洁目标机器人,所述预定任务为清洁任务。19.一种机器人,其特征在于,包括处理器、通信接口、存储器和通信总线,其中,处理器,通信接口,存储器通过通信总线完成相互间的通信;存储器,用于存放计算机程序;处理器,用于执行存储器上所存放的程序时,实现权利要求1-9任一所述的方法步骤。20.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现权利要求1-9任一所述的方法步骤。
技术总结
本发明实施例提供了一种机器人控制方法、机器人系统及一种机器人,涉及机器人技术领域。该机器人控制方法包括:在目标机器人按照预定任务所对应的预定路线移动时,基于所采集到的声音信息,确定满足预设声音条件的第一区域和不满足所述预设声音条件的第二区域;在确定出所述第一区域时,所述目标机器人按照所述预定路线继续移动;在确定出所述第二区域时,所述目标机器人执行所述预定任务;在所述目标机器人按照所述预定路线移动结束后,若存在未执行所述预定任务的剩余区域,则针对所述剩余区域执行所述预定任务。与现有技术相比,应用本发明实施例提供的方案,可以提高机器人的工作效率。作效率。作效率。
技术研发人员:王晓佳
受保护的技术使用者:杭州萤石软件有限公司
技术研发日:2022.02.25
技术公布日:2022/5/20
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。