1.本发明涉及海洋作业自动化设备领域,具体地说是一种长距离水下机械臂式作业平台。
背景技术:
2.在海洋作业自动化领域,水下机器人是一种常见的解决方案,但现有技术中通常是利用管线电缆等固定绑缚水下机器人作业,很难规避管线电缆与水下机器人缠绕的问题,另外浮游的水下机器人会对海床产生冲刷,不仅减弱水下井口基础,而且会导致海水浑浊,而且利用水下机器人操作控制相对复杂,作业成本高、作业效率低,因此目前亟需一种新的自动化设备代替水下机器人进行作业。
技术实现要素:
3.本发明的目的在于提供一种长距离水下机械臂式作业平台,能够实现长距离水下作业,且可根据需要更换软连接和硬连接状态,使用灵活且操控简单。
4.本发明的目的是通过以下技术方案来实现的:
5.一种长距离水下机械臂式作业平台,包括旋转支撑机构、末端臂、水下硬连接机构和依次铰接相连的多个节臂,其中第一节臂通过第一节臂液压缸驱动摆动,且第一节臂下端和第一节臂液压缸下端均铰接于所述旋转支撑机构上,其余各个节臂均通过设于相邻节臂上的节臂液压缸驱动摆动,最后一节节臂与所述末端臂相连,所述末端臂下端通过一个旋转臂与水下硬连接机构相连,所述水下硬连接机构下端与水下作业工具包相连,在末端臂内设有软连接组件和旋转组件,所述软连接组件设有软连接绳穿过所述旋转臂和水下硬连接机构后与水下作业工具包相连,所述旋转组件设有可升降的滑轮与所述旋转臂上端的螺旋槽配合,所述水下硬连接机构包括底锁座、底锁扭转滑块、摆杆和可升降的推块,其中摆杆通过所述推块升降驱动摆动,底锁扭转滑块通过所述摆杆驱动沿着底锁座上对应的滑槽移动,底锁座下侧设有底锁与水下作业工具包上的集装箱角件配合,且所述底锁上的锁杆通过对应的底锁扭转滑块驱动转动。
6.所述软连接组件包括软连接液压缸和软连接绳,且所述软连接绳上端与所述软连接液压缸的缸杆端部连接。
7.所述旋转组件包括旋转液压缸、滑座和滑轨,所述滑座通过所述旋转液压缸驱动沿着所述滑轨升降滑动,所述滑轮设于所述滑座上。
8.所述末端臂包括末端臂壳体,且所述末端臂壳体上端与最后一节节臂相连、下端与所述旋转臂转动连接,所述软连接组件和旋转组件均设于所述末端臂壳体中。
9.所述末端臂壳体下端设有旋转臂轴套、旋转臂轴环和旋转臂轴盖,其中所述旋转臂上设有法兰置于所述旋转臂轴套和旋转臂轴环之间,且所述法兰和旋转臂轴环通过所述旋转臂轴盖限位。
10.所述水下硬连接机构包括硬连接壳体和连接液压缸,所述硬连接壳体上端与所述
旋转臂下端固连、下端与所述底锁座固连,所述推块、摆杆以及连接液压缸均设于所述硬连接壳体中,且所述推块通过所述连接液压缸驱动升降,所述摆杆一端与所述推块铰接,另一端与对应的底锁扭转滑块铰接。
11.在所述硬连接壳体内设有导向座,且所述推块沿着所述导向座升降。
12.所述旋转支撑机构包括座体、旋转驱动装置、驱动齿轮和回转支承,所述旋转驱动装置、驱动齿轮和回转支承均设于所述座体上,且所述驱动齿轮与所述回转支承外齿啮合并通过所述旋转驱动装置驱动旋转。
13.所述回转支承上设有连接座和第一液压缸铰座,所述第一节臂下端与所述连接座铰接,所述第一节臂液压缸缸体下端与所述第一液压缸铰座交接,所述第一节臂液压缸的缸杆端部与所述第一节臂中部铰接。
14.除所述第一节臂外的其余各个节臂均包括节臂液压缸、节臂铰接架和节臂连杆,其中节臂铰接架一端与相邻节臂端部铰接、另一端与对应的节臂连杆铰接,所述节臂连杆另一端与对应的节臂本体端部铰接,节臂液压缸的缸体下端铰接于相邻节臂上、缸体端部与对应的节臂铰接架铰接。
15.本发明的优点与积极效果为:
16.1、本发明包括多个可依次延展的节臂,能够实现长距离水下作业,另外末端臂中设有软连接组件,所述软连接组件设有软连接绳与水下作业工具包连接,同时末端臂下端设有水下硬连接机构,其可通过控制底锁锁定水下作业工具包上的集装箱角件实现硬连接,使用灵活。
17.2、本发明利用多个节臂实现长距离作业,相比于浮游的水下机器人,不会出现管线电缆与水下机器人缠绕的问题,另外对海床产生的冲刷小,不会减弱水下井口基础或者导致海水浑浊。
18.3、本发明可根据确定的综合作业船gps坐标及作业点gps坐标(或信标坐标)自动算出相对位置及运动轨迹,一键展开运动到作业点附近,水下作业工具包到位后长距离水下机械臂式作业平台停止运动并锁定,当水下作业工具包与水下作业对象连接后,长距离水下机械臂式作业平台与水下作业工具包进行软连接,减小洋流对作业系统的影响,整个操控更为简单。
附图说明
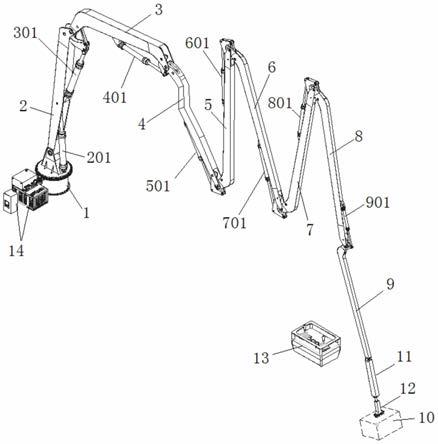
19.图1为本发明的整体示意图,
20.图2为图1中本发明的另一角度示意图,
21.图3为图2中的a处放大图,
22.图4为图2中的b处放大图,
23.图5为图2中的c处放大图,
24.图6为图2中的d处放大图,
25.图7为图2中的e处放大图,
26.图8为图2中的f处放大图,
27.图9为图2中的g处放大图,
28.图10为图2中的h处放大图,
29.图11为图2中的末端臂示意图,
30.图12为图11中的i处放大图,
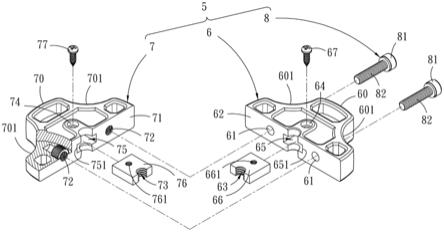
31.图13为图11中的水下硬连接机构示意图,
32.图14为图13中的j处放大图。
33.其中,1为旋转支撑机构,101为座体,102为旋转马达,103为减速机,104为驱动齿轮,105为回转支承,106为连接座,107为连接法兰;2为第一节臂,201为第一节臂液压缸,202为第一液压缸铰座,203为第一节臂下铰轴,204为第一缸杆铰轴;3为第二节臂,301为第二节臂液压缸,302为第二液压缸铰座,303为第二节臂铰接架,304为第二节臂连杆,305为铰轴一,306为铰轴二,307为铰轴三,308为铰轴四,309为铰轴五;4为第三节臂,401为第三节臂液压缸,402为第三液压缸铰座,403为第三节臂铰接架,404为第三节臂连杆,405为铰轴六,406为铰轴七,407为铰轴八,408为铰轴九,409为铰轴十;5为第四节臂,501为第四节臂液压缸,502为第四液压缸铰座,503为第四节臂铰接架,504为第四节臂连杆,505为铰轴十一,506为铰轴十二,507为铰轴十三,508为铰轴十四,509为铰轴十五;6为第五节臂,601为第五节臂液压缸,602为第五液压缸铰座,603为第五节臂铰接架,604为第五节臂连杆,605为铰轴十六,606为铰轴十七,607为铰轴十八,608为铰轴十九,609为铰轴二十;7为第六节臂,701为第六节臂液压缸,702为第六液压缸铰座,703为第六节臂铰接架,704为第六节臂连杆,705为铰轴二十一,706为铰轴二十二,707为铰轴二十三,708为铰轴二十四,709为铰轴二十五;8为第七节臂,801为第七节臂液压缸,802为第七液压缸铰座,803为第七节臂铰接架,804为第七节臂连杆,805为铰轴二十六,806为铰轴二十七,807为铰轴二十八,808为铰轴二十九,809为铰轴三十;9为第八节臂,901为第八节臂液压缸,902为第八液压缸铰座,903为第八节臂铰接架,904为第八节臂连杆,905为铰轴三十一,906为铰轴三十二,907为铰轴三十三,908为铰轴三十四;10为水下作业工具包;11为末端臂,111为软连接组件,1111为软连接液压缸,1112为软连接绳,1113为软连接液压缸铰座,1114为软连接绳轴,1115为工具包接头,112为旋转组件,1121旋转液压缸,1122为旋转臂,1123为滑轮,1124为螺旋槽,1125为滑轨,1126为滑座,1127为旋转臂轴套,1128为旋转臂轴盖,1129为旋转臂轴环,113为末端臂壳体,1131为连接轴,12为水下硬连接机构,1201为连接液压缸,1202为导向座,1203为推块,1204为底锁扭转滑块,1205为摆杆,1206为底锁座,1207为硬连接壳体;13为操作台,14为系统总成,15为底锁,151为锁杆,16为集装箱角件。
具体实施方式
34.下面结合附图对本发明作进一步详述。
35.如图1~14所示,本发明包括旋转支撑机构1、末端臂11、水下硬连接机构12和依次铰接相连的多个节臂,其中如图3所示,所述多个节臂中的第一节臂2通过第一节臂液压缸201驱动摆动,且所述第一节臂2下端和所述第一节臂液压缸201下端均铰接于所述旋转支撑机构1上,如图1~2所示,各个节臂依次铰接连接且均通过设于相邻节臂上的节臂液压缸驱动摆动,最后一节节臂与所述末端臂11相连,如图11~14所示,所述末端臂11下端通过一个旋转臂1122与所述水下硬连接机构12相连,所述水下硬连接机构12下端与水下作业工具包10相连,在所述末端臂11内设有软连接组件111和旋转组件112,如图11所示,所述软连接组件111设有软连接绳1112,且所述软连接绳1112穿过所述旋转臂1122和水下硬连接机构
12后与所述水下作业工具包10相连,如图12所示,所述旋转组件112设有可升降的滑轮1123,且所述滑轮1123与所述旋转臂1122上端的螺旋槽1124配合,当所述滑轮1123升降时即沿着所述螺旋槽1124滚动,进而驱动所述旋转臂1122转动,如图13所示,所述水下硬连接机构12包括底锁座1206、底锁扭转滑块1204、摆杆1205和可升降的推块1203,所述摆杆1205通过所述推块1203升降驱动摆动,所述底锁扭转滑块1204通过所述摆杆1205驱动沿着所述底锁座1206上对应的滑槽移动,底锁15设于水下作业工具包10上对应的集装箱角件16中,且所述底锁15上的锁杆151设于对应底锁扭转滑块1204下侧的凹口中,所述底锁扭转滑块1204移动即驱动所述锁杆151转动实现底座15锁定。所述水下作业工具包10、底锁15和集装箱角件16均为本领域公知技术。
36.如图11~12所示,所述末端臂11包括末端臂壳体113,且所述末端臂壳体113上端通过连接轴1131与最后一节节臂相连,所述末端臂壳体113下端与所述旋转臂1122转动连接,所述软连接组件111和旋转组件112均设于所述末端臂壳体113中,其中所述软连接组件111包括软连接液压缸1111和软连接绳1112,在所述末端臂壳体113内设有软连接液压缸铰座1113,所述软连接液压缸1111上端铰接于所述软连接液压缸铰座1113上,所述软连接绳1112上端与所述软连接液压缸1111的缸杆端部连接,所述软连接绳1112下端穿过所述旋转臂1122和水下硬连接机构12后与所述水下作业工具包10相连,本实施例中,所述软连接绳1112下端设有软连接绳轴1114与设于所述水下作业工具包10上的工具包接头1115固连,这样所述软连接液压缸1111伸缩实现水下作业工具包10的软连接作业。
37.如图12所示,所述末端臂11内的旋转组件112包括旋转液压缸1121、滑座1126和滑轨1125,所述滑座1126与所述旋转液压缸1121的缸杆端部固连且沿着所述滑轨1125升降滑动,所述滑轮1123设于所述滑座1126上并通过所述滑座1126带动升降。
38.如图12所示,所述末端臂壳体113下端设有旋转臂轴套1127、旋转臂轴环1129和旋转臂轴盖1128实现与所述旋转臂1122的转动连接,其中所述旋转臂1122上设有法兰置于所述旋转臂轴套1127和旋转臂轴环1129之间,且所述法兰和旋转臂轴环1129通过所述旋转臂轴盖1128限位。
39.如图13~14所示,所述水下硬连接机构12包括硬连接壳体1207和连接液压缸1201,所述硬连接壳体1207上端与所述旋转臂1122下端固连、下端与所述底锁座1206固连,所述推块1203、摆杆1205以及连接液压缸1201均设于所述硬连接壳体1207中,且所述推块1203通过所述连接液压缸1201驱动升降,所述摆杆1205一端与所述推块1203铰接,另一端与对应的底锁扭转滑块1204铰接,所述底锁扭转滑块1204设于所述底锁座1206内对应的滑槽中,所述软连接绳1112穿过所述底锁座1206后与水下作业工具包10连接。
40.如图13所示,在所述硬连接壳体1207内设有导向座1202,所述推块1203设于所述导向座1202中,并通过所述连接液压缸1201推动沿着所述导向座1202升降滑动。
41.如图3所示,与第一节臂2相连的旋转支撑机构1包括座体101、旋转驱动装置、驱动齿轮104和回转支承105,所述旋转驱动装置、驱动齿轮104和回转支承105均设于所述座体101上,且所述驱动齿轮104与所述回转支承105外齿啮合并通过所述旋转驱动装置驱动旋转,本实施例中,所述旋转驱动装置包括旋转马达102和减速机103,所述驱动齿轮104固装于所述减速机的输出轴上,所述座体101下侧设有用于安装的连接法兰107。
42.如图3所示,在所述回转支承105上设有连接座106和第一液压缸铰座202,所述第
一节臂2下端通过第一节臂下铰轴203与所述连接座106铰接,所述第一节臂液压缸201缸体下端铰接于所述第一液压缸铰座202上,所述第一节臂液压缸201的缸杆端部通过第一缸杆铰轴204与所述第一节臂2中部铰接。
43.除所述第一节臂2外的其余各个节臂均包括节臂液压缸、节臂铰接架和节臂连杆,其中如图4~5所示,第二节臂铰接架303和第三节臂铰接架403结构相同,其一端与后侧相邻节臂铰接,另一端设有两个铰轴分别与对应的节臂液压缸缸杆端部和节臂连杆铰接,所述节臂连杆另一端与对应的节臂本体铰接。
44.如图4所示,在第一节臂2上设有第二液压缸铰座302,第二节臂液压缸301缸体下端与所述第二液压缸铰座302铰接,所述第二节臂铰接架303一端通过铰轴四308与相邻第一节臂2端部铰接、另一端设有铰轴一305和铰轴二306,其中所述第二节臂液压缸301的缸杆端部安装于所述铰轴二306上,第二节臂连杆304一端安装于所述铰轴一305上、另一端通过铰轴五9与对应的第二节臂3本体铰接。所述第一节臂2和第二节臂3通过铰轴三307铰接。
45.如图5所示,在第二节臂3上设有第三液压缸铰座402,第三节臂液压缸401缸体下端与所述第三液压缸铰座402铰接,所述第三节臂铰接架403一端通过铰轴六405与相邻第二节臂3端部铰接、另一端设有铰轴九408和铰轴十409,其中所述第三节臂液压缸401的缸杆端部安装于所述铰轴十409上,第三节臂连杆404一端安装于所述铰轴九408上、另一端通过铰轴八407与对应的第三节臂4本体铰接。所述第二节臂3和第三节臂4通过铰轴七406铰接。
46.如图6~9所示,第四节臂铰接架503、第五节臂铰接架603、第六节臂铰接架703和第七节臂铰接架803结构相同,其两端分别与相邻节臂和对应的节臂连杆铰接相连,中间直角端与对应的节臂液压缸缸杆端部铰接。
47.如图6所示,在第三节臂4上设有第四液压缸铰座502,第四节臂液压缸501缸体下端与所述第四液压缸铰座502铰接,所述第四节臂铰接架503一端通过铰轴十一505与相邻第三节臂4端部铰接、另一端通过铰轴十四508与对应的第四节臂连杆504一端铰接,所述第四节臂连杆504另一端通过铰轴十五509与对应的第四节臂5本体铰接,所述第四节臂液压缸501的缸杆端部通过铰轴十二506与所述第四节臂铰接架503中间的直角端铰接。第三节臂4和第四节臂5通过铰轴十三507铰接。
48.如图7所示,在第四节臂5上设有第五液压缸铰座602,第五节臂液压缸601缸体下端与所述第五液压缸铰座602铰接,所述第五节臂铰接架603一端通过铰轴二十609与相邻第四节臂5端部铰接、另一端通过铰轴十七606与对应的第五节臂连杆604一端铰接,所述第五节臂连杆604另一端通过铰轴十六605与对应的第五节臂6本体铰接,所述第五节臂液压缸601的缸杆端部通过铰轴十九608与所述第五节臂铰接架603中间的直角端铰接。第四节臂5和第五节臂6通过铰轴十八607连接。
49.如图8所示,在第五节臂6上设有第六液压缸铰座702,第六节臂液压缸701缸体下端与所述第六液压缸铰座702铰接,所述第六节臂铰接架703一端通过铰轴二十四708与相邻第五节臂6端部铰接、另一端通过铰轴二十二706与对应的第六节臂连杆704一端铰接,所述第六节臂连杆704另一端通过铰轴二十一705与对应的第六节臂7本体铰接,所述第六节臂液压缸701的缸杆端部通过铰轴二十三707与所述第六节臂铰接架703中间的直角端铰接。第五节臂6和第六节臂通过铰轴二十五709铰接。
50.如图9所示,在第六节臂7上设有第七液压缸铰座802,第七节臂液压缸801缸体下端与所述第七液压缸铰座802铰接,所述第七节臂铰接架803一端通过铰轴二十六805与相邻第六节臂7端部铰接、另一端通过铰轴二十九808与对应的第七节臂连杆804一端铰接,所述第七节臂连杆804另一端通过铰轴三十809与对应的第七节臂8本体铰接,所述第七节臂液压缸801的缸杆端部通过铰轴二十七806与所述第七节臂铰接架803中间的直角端铰接。第六节臂7和第七节臂8通过铰轴二十八807铰接。
51.如图10所示,第八节臂铰接架903一端通过铰轴三十一905与相邻的第七节臂8端部铰接,另一端通过铰轴三十二906与第八节臂液压缸901缸杆端部以及第八节臂连杆904同时铰接。
52.如图10所示,在第七节臂8上设有第八液压缸铰座902,第八节臂液压缸901缸体下端铰接于所述第八液压缸铰座902上,所述第八节臂连杆904另一端通过铰轴三十四908与第八节臂9铰接。第七节臂8和第八节臂9通过铰轴三十三907铰接。
53.如图1所示,本发明可通过带操作杆的操作台13进行操作控制,另外由液压系统、电控系统、智能交互系统、动力源系统等组成的系统总成14设于所述旋转支撑机构1一侧。所述操作台13和系统总成14为本领域公知技术。
54.本发明的工作原理为:
55.本发明作业时,各个节臂依次展开并调整位姿,使末端臂11带动水下硬连接机构12移动到综合作业船甲板上的水下作业工具包10处,然后将末端臂11内的软连接绳1112与水下作业工具包10上的结构相连实现软连接,同时水下硬连接机构12中的连接液压缸1201启动使底锁15锁定水下作业工具包10上的集装箱角件16,然后系统总成14确定作业船gps坐标及作业点gps坐标(或信标坐标),并根据两个坐标自动算出相对位置及运动轨迹,在系统总成14控制下,各个节臂协调运动展开并使末端臂11落水运动到作业点附近,水下作业工具包10到位后各个节臂停止运动,水下作业工具包10与水下作业对象连接,作业人员遥控操作工具包完成相应的作业。另外当需要进行软连接作业时,水下硬连接机构12中的连接液压缸1201启动使底锁15松开,此时末端臂11与水下作业工具包10处于只通过软连接绳1112连接的状态,软连接绳1112长度可通过软连接液压缸1111的缸杆伸缩调节,当需要硬连接作业时,水下硬连接机构12中的连接液压缸1201启动使底锁15锁定,此时水下硬连接机构12通过底锁15与水下作业工具包10上的集装箱角件16硬连接。本发明可根据需要更换不同类型的水下作业工具包10。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。