1.本发明属于机器人技术领域,具体属于一种恶劣环境下用工业机器人。
背景技术:
2.伴随着工业的快速发展,化工、石油和煤矿产业等占据着重要的地位,在这些工业品生产及运输过程中产生易燃易爆和有毒有害的气体粉尘是在所难免的,这些气体粉尘存在较大的安全隐患,如果不及时检测并处理,当其在一定空间范围内超过额定浓度,极易发生爆炸及火灾。
3.现在行业内普遍采用的检测方式是定点气体检测,即在固定地点安装气体粉尘浓度探测器,当气体粉尘扩散到探测器的检测范围内,探测器会发生警报,提升相关人员采取措施处理,这种检测方式特别被动,当车间较大,易漏点较多时,需要大量安装探测器,十分的不便,且探测器只能简单的对气体粉尘浓度进行检测,当粉尘浓度超标时,只能进行预警,不具备临时降低粉尘浓度的功能。
技术实现要素:
4.为了解决现有技术存在的上述问题,本发明目的在于提供一种恶劣环境下用工业机器人。
5.本发明采用以下技术方案:
6.一种恶劣环境下用工业机器人,包括机器人本体,所述机器人本体内部设置有自动伸缩装置,所述自动伸缩装置上连接有检测装置,所述机器人本体的一侧设置有活动门和净化装置,所述活动门与所述自动伸缩装置位于同一轴线上,所述检测装置、自动伸缩装置和净化装置连接有同一控制系统。
7.采用上述方案,本发明的工业机器人能够对空间环境内的气体粉尘浓度进行检测并处理,当工业机器人开启检测功能时,工业机器人会沿设定路线在一定检测空间内活动,自动伸缩装置启动将检测装置送到机器人本体外,检测装置开启检测,并实时将结果传送给控制系统,当控制系统分析到气体粉尘浓度超标时,会发出信号给相关人员,并启动净化装置,及时降低检测范围内的一定气体粉尘浓度,避免气体粉尘浓度超标发生危险事故。
8.优选的,所述自动伸缩装置包括第一液压缸和第一伸缩杆,所述第一液压缸固设在机器人本体的内部,所述第一伸缩杆的一端与所述第一液压缸连接,第一伸缩杆的另一端与所述检测装置连接,所述第一伸缩杆与所述活动门位于同一轴线上,所述控制系统与所述第一液压缸连接。采用该优选的方案,本发明在不使用时可以通过自动伸缩装置将检测装置收缩到机器人本体内,避免精密、易损的检测装置受到不必要的损害,自动伸缩装置由第一液压缸和第一伸缩杆组成,通过液压系统的驱动精准且平稳的控制检测装置的进出。
9.优选的,所述检测装置为粉尘浓度探测器和危险气体探测器中的任一种。采用该优选的方案,本发明的工业机器人可以检测环境中粉尘的浓度,也可以检测环境中危险气
体的浓度。
10.优选的,所述机器人本体的一侧设置有用于检测装置通过的缺口,所述活动门设置在所述缺口上,所述活动门的顶部与所述机器人本体的一侧通过转轴连接。采用该优选的方案,活动门的顶部与机器人本体的侧面通过转轴连接,自动伸缩装置从机器人本体内带动检测装置顶开活动门,检测装置从缺口离开机器人本体开始检测。
11.优选的,所述机器人本体的一侧设置有用于检测装置通过的缺口,所述活动门设置在所述缺口上,所述机器人本体内设置有驱动装置,所述驱动装置包括第二液压缸和第二伸缩杆,所述第二伸缩杆的两端分别连接所述活动门和所述第二液压缸,所述控制系统与所述第二液压缸连接。采用该优选的方案,控制系统控制自动检测装置启动,并控制驱动装置将活动门从缺口处拉开,使得检测装置能够离开机器人本体进行检测。
12.优选的,所述净化装置包括喷水管、水泵和水箱,所述喷水管固设在所述机器人本体内,所述喷水管的一端位于机器人本体的一侧,喷水管的另一端通过水泵与水箱连接,所述水箱位于所述机器人本体内。采用该优选的方案,本发明的净化装置为水管及水箱组成,当检测装置检测到环境中气体粉尘浓度超标时,水泵启动从水箱中抽取水源,并从喷水管中喷出,以此降低环境中的气体粉尘浓度。
13.优选的,所述机器人本体的一侧还设置有工业摄像头,所述控制系统与所述工业摄像头连接,所述工业摄像头的上方为检测装置,所述工业摄像头的下方为净化装置。采用该优选的方案,机器人本体的一侧设置有工业摄像头,工业摄像头能够将拍摄到的画面通过信号传回电脑,并记录机器人的工作情况。
14.优选的,所述机器人本体的底部设置有行走装置,所述行走装置包括车轮和驱动电机,所述驱动电机用于驱动所述车轮,所述控制系统与所述驱动电机连接。采用该优选的方案,行走装置用于工业机器人的驱动,其由控制系统控制。
15.优选的,所述机器人本体的顶部还设置有太阳能吸收装置,所述太阳能吸收装置连接有蓄电池,所述蓄电池用于向工业机器人供电。采用该优选的方案,本发明还设置了太阳能吸收装置,当本发明处于休息维护状态时,可以利用太阳能进行充电,节约能源。
16.综上所述,由于采用了上述技术方案,本发明的有益效果是:
17.1.本发明的工业机器人能够对空间环境内的气体粉尘浓度进行检测并处理,当工业机器人开启检测功能时,工业机器人会沿设定路线在一定检测空间内活动,自动伸缩装置启动将检测装置送到机器人本体外,检测装置开启检测,并实时将结果传送给控制系统,当控制系统分析到气体粉尘浓度超标时,会发出信号给相关人员,并启动净化装置,及时降低检测范围内的一定气体粉尘浓度,避免气体粉尘浓度超标发生危险事故。
18.2.本发明在不使用时可以通过自动伸缩装置将检测装置收缩到机器人本体内,避免精密、易损的检测装置受到不必要的损害,自动伸缩装置由第一液压缸和第一伸缩杆组成,通过液压系统的驱动精准且平稳的控制检测装置的进出。本发明的工业机器人可以检测环境中粉尘的浓度,也可以检测环境中危险气体的浓度。
19.3.本发明活动门的顶部与机器人本体的侧面通过转轴连接,自动伸缩装置从机器人本体内带动检测装置顶开活动门,检测装置从缺口离开机器人本体开始检测。控制系统控制自动检测装置启动,并控制驱动装置将活动门从缺口处拉开,使得检测装置能够离开机器人本体进行检测。
20.4.本发明的净化装置为水管及水箱组成,当检测装置检测到环境中气体粉尘浓度超标时,水泵启动从水箱中抽取水源,并从喷水管中喷出,以此降低环境中的气体粉尘浓度。机器人本体的一侧设置有工业摄像头,工业摄像头能够将拍摄到的画面通过信号传回电脑,并记录机器人的工作情况。行走装置用于工业机器人的驱动,其由控制系统控制。本发明还设置了太阳能吸收装置,当本发明处于休息维护状态时,可以利用太阳能进行充电,节约能源。
附图说明
21.本发明将通过例子并参照附图的方式说明,其中:
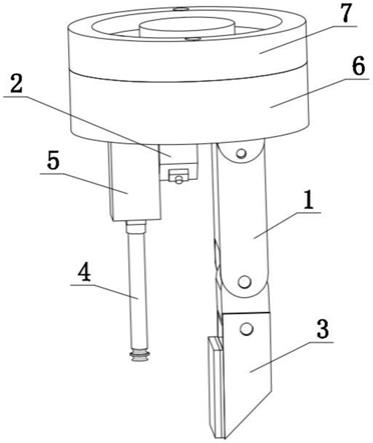
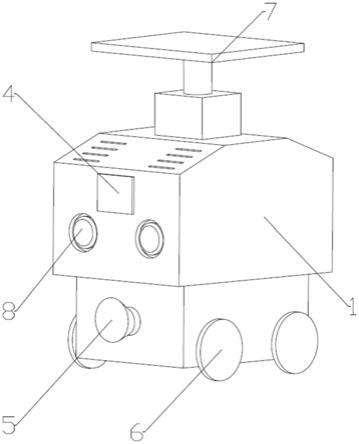
22.图1是本发明的立体结构示意图。
23.图2是本发明的内部结构示意图。
24.附图标记:。1-机器人本体;2-自动伸缩装置;3-检测装置;4-活动门;5-净化装置;6-行走装置;7-太阳能吸收装置。
具体实施方式
25.本说明书中公开的所有特征,或公开的所有方法或过程中的步骤,除了互相排斥的特征和/或步骤以外,均可以以任何方式组合。
26.下面结合图1-2对本发明作详细说明。
27.实施例一:
28.一种恶劣环境下用工业机器人,包括机器人本体1,所述机器人本体1内部设置有自动伸缩装置2,所述自动伸缩装置2上连接有检测装置3,所述机器人本体1的一侧设置有活动门4和净化装置5,所述活动门4与所述自动伸缩装置2位于同一轴线上,所述检测装置3、自动伸缩装置2和净化装置5连接有同一控制系统。
29.所述自动伸缩装置2包括第一液压缸和第一伸缩杆,所述第一液压缸固设在机器人本体1的内部,所述第一伸缩杆的一端与所述第一液压缸连接,第一伸缩杆的另一端与所述检测装置3连接,所述第一伸缩杆与所述活动门4位于同一轴线上,所述控制系统与所述第一液压缸连接。
30.所述净化装置5包括喷水管、水泵和水箱,所述喷水管固设在所述机器人本体1内,所述喷水管的一端位于机器人本体1的一侧,喷水管的另一端通过水泵与水箱连接,所述水箱位于所述机器人本体1内。
31.所述机器人本体1的底部设置有行走装置6,所述行走装置6包括车轮和驱动电机,所述驱动电机用于驱动所述车轮,所述控制系统与所述驱动电机连接。
32.在上述实施例一中,本发明的工业机器人适用于环境恶劣的生产车间、井下作业及矿下作业,如图1和图2所示,工业机器人包括机器人本体1,机器人本体1分为上下两层,上层内部设置自动伸缩装置2和检测装置3,下层内部设置净化装置5,自动伸缩装置2由第一液压缸和第一伸缩杆组成,第一液压缸固定在机器人本体1的内部,通过第一伸缩杆连接第一液压缸和检测装置3,检测装置3为高灵敏探测器,用于探测环境内的气体粉尘浓度,净化装置5包括喷水管、水泵和水箱,喷水管固定在机器人本体1的内部,通过水泵从水箱中抽取水源,水箱中存储着一定量的水,当水源不足时,控制系统控制机器人到指定的取水处进
行水源补充,控制系统按照设定的程序通过行走装置6设定工业机器人在一定空间范围内巡检,启动第一液压缸,第一伸缩杆伸缩带动检测装置3从机器人本体1捏对所行范围内的气体粉尘浓度进行实时监测,当检测到浓度超标时,反馈信号到控制系统,启动水泵,水流从喷水管喷出以降低环境中的气体粉尘浓度,喷水管的端部设置有雾化喷头。
33.实施例二:
34.所述机器人本体1的一侧设置有用于检测装置3通过的缺口,所述活动门4设置在所述缺口上,所述活动门4的顶部与所述机器人本体1的一侧通过转轴连接。
35.所述机器人本体1的一侧设置有用于检测装置3通过的缺口,所述活动门4设置在所述缺口上,所述机器人本体1内设置有驱动装置,所述驱动装置包括第二液压缸和第二伸缩杆,所述第二伸缩杆的两端分别连接所述活动门4和所述第二液压缸,所述控制系统与所述第二液压缸连接。
36.实施例二是在实施例一的基础上进一步改进的,本实施例二中,提供两种活动门4的安装方式,第一种为在机器人本体1的侧面开设缺口,并将活动门4安装该缺口处即机器人本体1的外侧,活动门4的顶部与机器人本体1的侧面通过转动连接,当自动伸缩装置2伸缩带动检测装置3时,会推动活动门4翻转,检测装置3离开机器本体内部,第二种也是在机器人本体1的侧面开设缺口,将活动门4安装在该缺口处即机器人本体1的内侧,并在机器人本体1的内部安装驱动装置,驱动装置为第二液压缸和第二伸缩杆,通过第二伸缩杆连接第二液压缸和活动门4的一侧,通过驱动装置驱动活动门4,实现缺口的打开和关闭。
37.实施例三:
38.所述检测装置3为粉尘浓度探测器和危险气体探测器中的任一种。
39.所述机器人本体1的一侧还设置有工业摄像头8,所述控制系统与所述工业摄像头8连接,所述工业摄像头8的上方为检测装置3,所述工业摄像头8的下方为净化装置5。
40.所述机器人本体1的顶部还设置有太阳能吸收装置7,所述太阳能吸收装置77连接有蓄电池,所述蓄电池用于向工业机器人供电。
41.实施例三是在实施例一的基础上优选得到的,本实施例三中,检测装置3有两种,第一种为粉尘浓度探测器,第二种为危险气体探测器,皆为现有技术中的成熟产品,同时本发明的工业机器人本体1上还设置有工业摄像头8,符合工况复杂,环境恶劣的条件,在机器人本体1的顶部安装太阳能吸收装置77,当本发明处于休息维护状态时,可以利用太阳能进行充电,充电存储到蓄电池中,供整个工业机器人使用,节约能源。
42.以上所述实施例仅表达了本技术的具体实施方式,其描述较为具体和详细,但并不能因此而理解为对本技术保护范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术技术方案构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。