1.本发明涉及芯片检测技术领域,尤其涉及一种集成电路芯片平整度检测设备及方法。
背景技术:
2.无论是电器产品还是其他电子产品,集成电路均是其内部重要的组成部件之一,集成电路是一种微型电子器件或部件。采用一定的工艺,把一个电路中所需的晶体管、电阻、电容和电感等元件及布线互连一起,制作在一小块或几小块半导体晶片或介质基片上,然后封装在一个管壳内,成为具有所需电路功能的微型结构,而集成电路的载体则是芯片,芯片在生产后,需要工人对生产后的半导体芯片厚度与引脚进行平整度测试,为此方便半导体芯片的后续使用;现有技术中,现有的检测方法往往是人工通过卡尺进行测量,无法实现大批量的芯片检测,效率较低,而现有的机器检测往往是通过机械臂取放芯片再通过检测仪进行检测,机械臂单次仅能对一个芯片进行检测,且需要经历取放两个过程,效率较低。
技术实现要素:
3.本发明的目的是为了解决现有技术中批量检测效率低等问题,而提出的一种集成电路芯片平整度检测设备及方法。
4.为了实现上述目的,本发明采用了如下技术方案:一种集成电路芯片平整度检测设备,包括机座,所述机座上表面焊接有立柱,所述立柱固定连接有固定块,所述固定块侧壁固定连接有若干检测仪,所述固定块通过轴承贯穿转动连接有转动块,所述转动块内设置有用于平整度检测的检测机构;所述检测机构包括开设在转动块内侧壁的安装槽,所述安装槽内底壁固定连接有内齿圈,所述固定块内侧壁通过支架固定连接有伺服电机,所述伺服电机的输出轴过盈配合有第一齿轮,所述第一齿轮与内齿圈啮合,所述转动块开设有八个功能槽,所述转动块通过轴承贯穿转动连接有八个转动轴,所述转动轴位于安装槽内的一端过盈配合有第二齿轮,所述转动轴位于对应的所述功能槽内的一端过盈配合有蜗杆,所述固定块位于安装槽内的侧壁固定连接有上环板、下环板,所述功能槽相对的两个内侧壁之间通过轴承转动连接有安装杆,所述安装杆过盈配合有蜗轮,所述蜗轮与对应的所述蜗杆啮合,所述安装杆贯穿固定连接有两个安装块。
5.进一步,所述检测机构还包括八个连接板,每个所述连接板上表面均固定连接有若干滑动杆,所述滑动杆与对应的所述安装块贯穿滑动连接,所述连接板与对应的所述安装块之间固定连接有若干第一弹簧,所述连接板下表面通过轴承转动连接有负压盒,所述负压盒底壁贯穿固定连接有吸盘,所述负压盒内密封滑动连接有负压板,所述负压板与负压盒内顶壁之间固定连接有若干第二弹簧,所述转动块内侧壁开设有控制槽,所述固定块位于控制槽处的侧壁固定连接有环形导电板,所述控制槽内滑动连接有八个导电块,所述
导电块与控制槽内侧壁之间固定连接有第三弹簧,所述转动块内设置有八个第二电磁铁,对应的两个所述安装块下表面共同固定连接有第一电磁铁,所述第一电磁铁、环形导电板与对应的所述导电块通过导线电连接。
6.进一步,所述固定块侧壁通过支架固定连接有齿板,所述负压盒过盈配合有第三齿轮,所述第三齿轮与齿板啮合。
7.进一步,所述机座上设置有用于供给材料的供料机构,所述供料机构包括截面为开口朝上凹字形的物料盒,所述物料盒与机座滑动连接,所述物料盒内滑动连接有送料板,所述送料板与物料盒之间固定连接有第三弹簧,所述物料盒上表面通过铰链转动连接有两个挡板,所述挡板与物料盒的转动连接处设置有扭力弹簧。
8.进一步,所述机座上表面开设有滑动槽,所述滑动槽内阻尼滑动连接有滑块,所述滑块与物料盒下表面固定连接。
9.进一步,所述机座上表面固定连接有正品盒与次品盒,所述正品盒与次品盒的截面均为开口朝上的凹字形,所述正品盒与次品盒内底壁高度均逐渐降低,所述负压盒顶壁开设有平衡孔。
10.进一步,所述内齿圈内侧壁设置有齿并与所述第一齿轮啮合,所述内齿圈的齿数为第一齿轮的齿数的八倍。
11.进一步,所述上环板下表面设置有齿并与所述第二齿轮啮合,所述下环板上表面设置有齿并与所述第二齿轮啮合。
12.本发明还提供了一种集成电路芯片平整度检测方法,包括以下步骤:s1、将待检测的芯片置于物料盒内并放置在机座上;s2、开启伺服电机,通过伺服电机驱动第一齿轮转动,再通过第一齿轮与内齿圈的啮合带动转动块转动,当吸盘转动至物料盒上方时,通过第一电磁铁使得负压盒内产生负压通过吸盘先将芯片吸附,而后再向上运动,继续随转动块转动;s3、转动至第一个检测仪处时,首先对芯片的底面进行检测,当检测到不平整时,此时第二电磁铁通电,使得导电块与环形导电板分开,从而使得第一电磁铁断电,此时次品落入次品盒;s4、底面检测合格后,芯片随转动块继续转动,通过安装杆转动,带动安装块转动从而使得芯片转动90
°
,此时继续转动,对芯片的各个侧边进行平整对检测,检测不合格的落入次品盒内;s5、侧边与底面检测均合格的芯片,落入正品盒内进行收集;s6、检测合格的芯片收集后,吸附合格芯片的吸盘随转动块再次转动至物料盒上方,吸附新的吸盘进行检测。
13.本发明具有以下优点:1、通过转动块的转动,从而带动待检测芯片随转动块一同转动,在转动的过程中,依次对芯片底面以及侧边的平整度进行检测,检测完成后,吸盘刚好再次对下一个待检测的芯片进行吸附,并随转动块转动,从而实现批量、连续且自动化的芯片检测,从而大大提高了检测效率;2、仅需要设置一个伺服电机即可完成驱动芯片的取放以及检测,从而使得设备的结构更加紧凑,且减少了驱动源,减少故障发生的几率同时降低了设备制造成本;
3、通过物料盒的设置,吸盘将一个芯片吸附后,在第三弹簧的弹力下,送料板将下一个待检测的芯片送至上方,等待被下一个吸盘吸附检测,从而实现自动上料,避免了人工上料,大大降低了劳动强度,且降低了人力成本;4、通过正品盒与次品盒将正品与次品进行分类并储存,且在检测完成后,芯片自动落入正品盒与次品盒内,自动分类的同时,避免了人工下料,大大降低劳动强度,且使得设备的自动化程度更高。
附图说明
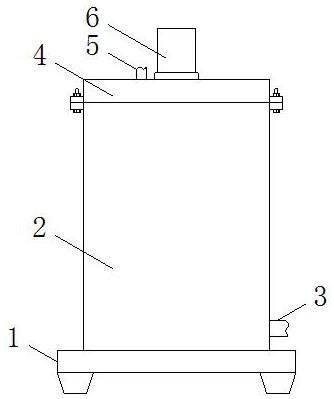
14.图1为本发明提出的一种集成电路芯片平整度检测设备的结构示意图;图2为图1中的a处放大图;图3为图1中的b处放大图;图4为图1中的c处放大图;图5为本发明提出的一种集成电路芯片平整度检测设备中固定块的结构示意图;图6为本发明提出的一种集成电路芯片平整度检测设备中下环板的结构示意图;图7为本发明提出的一种集成电路芯片平整度检测设备中上环板的结构示意图;图8为图1中的d-d处剖面图;图9为图8中的f处放大图;图10为图1中的e-e处剖面图;图11为本发明提出的一种集成电路芯片平整度检测设备的俯视图。
15.图中:1机座、2立柱、3固定块、4转动块、401功能槽、5安装槽、6伺服电机、7第一齿轮、8内齿圈、9转动轴、10第二齿轮、11上环板、12下环板、13蜗杆、14安装杆、15蜗轮、16安装块、17滑动杆、18连接板、19第一弹簧、20负压盒、21负压板、22第二弹簧、23永磁体、24吸盘、25平衡孔、26第一电磁铁、27控制槽、28环形导电板、29导电块、30第三弹簧、31第二电磁铁、32检测仪、33次品盒、34正品盒、35滑动槽、36滑块、37物料盒、38送料板、39第三弹簧、40挡板、41第三齿轮、42齿板。
具体实施方式
16.参照图1-11,一种集成电路芯片平整度检测设备,包括机座1,机座1上表面焊接有立柱2,立柱2固定连接有固定块3,固定块3侧壁固定连接有若干检测仪32,如图11所示,检测仪32均匀分布有五个,其中一个对芯片底面进行检测,其余四个对芯片的四个侧边进行检测,固定块3通过轴承贯穿转动连接有转动块4,转动块4为环形,转动块4内设置有用于平整度检测的检测机构;检测机构包括开设在转动块4内侧壁的安装槽5,安装槽5为一环形槽,安装槽5内底壁固定连接有内齿圈8,内齿圈8内侧壁设置有齿并与第一齿轮7啮合,内齿圈8的齿数为第一齿轮7的齿数的八倍,内齿圈8的齿数为第一齿轮7齿数的八倍使得伺服电机6转动一圈即可通过第一齿轮7带动内齿圈8转动45
°
,从而使得芯片转动至下一个区域,从而更加方便设备的控制,固定块3内侧壁通过支架固定连接有伺服电机6,伺服电机6可以精确的控制其转动的圈数,为现有技术,在此不做赘述,伺服电机6的输出轴过盈配合有第一齿轮7,第一齿轮7与内齿圈8啮合,转动块4开设有八个功能槽401,转动块4通过轴承贯穿转动连接有八
个转动轴9,转动轴9位于安装槽5内的一端过盈配合有第二齿轮10,转动轴9位于对应的功能槽401内的一端过盈配合有蜗杆13,固定块3位于安装槽5内的侧壁固定连接有上环板11、下环板12,上环板11下表面设置有齿并与第二齿轮10啮合,下环板12上表面设置有齿并与第二齿轮10啮合,如图6与图7所示,上环板11上表面的齿与下环板12下表面的齿点对称,且齿分布角度为45
°
,从而使得转动块4在转动过程中,首先使得第二齿轮10与上环板11下表面的齿啮合,从而使得转动轴9转动,再通过蜗杆13与蜗轮15的啮合,使得安装杆14带动两个安装块16转动,从而带动水平的芯片逆时针转动至竖直状态,以便于对芯片侧边的平整度进行检测,而在检测完成后,随着转动块4的转动,使得第二齿轮10与下环板12上表面的齿啮合,此时由于上下两个环板的位置关系,以及转动关系,使得安装杆14带动安装块16顺时针转动,从而使得芯片与吸盘24恢复水平状态,便于吸盘24对后续芯片的吸附,功能槽401相对的两个内侧壁之间通过轴承转动连接有安装杆14,安装杆14过盈配合有蜗轮15,蜗轮15与对应的蜗杆13啮合,安装杆14贯穿固定连接有两个安装块16,通过第一电磁铁26的磁力,使得永磁体23受到磁吸力,首先使得吸盘24内产生负压对芯片进行吸附,再使得负压盒20上移,将芯片从物料盒37内取出,通过吸盘对待检测的芯片进行吸附,吸附后随转动块4一同转动,经过第一个检测仪32,首先对芯片底面进行检测,而后通过第二齿轮10与上环板11下表面的齿啮合,使得芯片逆时针转动至水平状态,再随转动块4转动对侧边进行检测,从而使得芯片随转动块4转动的过程中,完成检测,可以一次性对多个芯片进行连续的监测,相较于现有技术一次仅能对一个芯片进行检测,且需要进行往复取放料过程,大大提高了加工效率。
17.值得一提的是,第二弹簧22的劲度系数远小于第一弹簧19的劲度系数,从而使得第一电磁铁26对永磁体23产生磁吸力时,由于劲度系数大小的关系,一定是先使得负压板21先上升,将第二弹簧22压缩至极限状态时,才会使得第一弹簧19被压缩,从而使得负压盒20整个上升。
18.检测机构还包括八个连接板18,每个连接板18上表面均固定连接有若干滑动杆17,滑动杆17的设置使得连接板18的上下运动更加平稳,滑动杆17与对应的安装块16贯穿滑动连接,连接板18与对应的安装块16之间固定连接有若干第一弹簧19,连接板18下表面通过轴承转动连接有负压盒20,负压盒20底壁贯穿固定连接有吸盘24,负压盒20内密封滑动连接有负压板21,负压板21与负压盒20内顶壁之间固定连接有若干第二弹簧22,转动块4内侧壁开设有控制槽27,固定块3位于控制槽27处的侧壁固定连接有环形导电板28,如图5与图8所示,环形导电板28并非完整圆环,其为270
°
圆弧,控制槽27内滑动连接有八个导电块29,导电块29与控制槽27内侧壁之间固定连接有第三弹簧30,转动块4内设置有八个第二电磁铁31,对应的两个安装块16下表面共同固定连接有第一电磁铁26,第一电磁铁26、环形导电板28与对应的导电块29通过导线电连接,第二电磁铁31与plc控制电路连接,当检测仪32检测到不合格品时,通过plc控制电路使得第二电磁铁31通电,从而使得导电块29与环形导电板28分离,从而使得第一电磁铁26断电,从而使得吸盘24使其吸力,芯片掉落,落入次品盒33内,或在检测全部完成且通过后,随着转动块4的转动,转动至导电块29不与环形导电板28接触,第一电磁铁26也会断电,使得芯片落入正品盒34内,从而实现在检测过程中,自动下料与分类,使得设备的自动化程度更高。
19.固定块3侧壁通过支架固定连接有齿板42,齿板42非完整圆弧,其为135
°
圆弧形,
齿板42下表面设置有齿,通过下表面的齿与第三齿轮41啮合,负压盒20过盈配合有第三齿轮41,第三齿轮41与齿板42啮合,当蜗杆13与蜗轮15配合使得安装块16带动芯片转动至芯片水平时,此时第三齿轮41刚好与齿板42啮合,此时随着转动块4的转动,通过第三齿轮41与齿板42的啮合,使得负压盒20转动,从而带动吸盘24带动芯片转动,且通过齿数的设置,使得转动块4每转动45
°
,带动芯片转动90
°
,使得转动块4在转动的同时,带动芯片转动,使得芯片的不同侧边与检测仪32对其,从而对芯片的不同侧边进行检测。
20.机座1上设置有用于供给材料的供料机构,供料机构包括截面为开口朝上凹字形的物料盒37,物料盒37与机座1滑动连接,物料盒37内滑动连接有送料板38,送料板38与物料盒37之间固定连接有第三弹簧39,物料盒37上表面通过铰链转动连接有两个挡板40,挡板40与物料盒37的转动连接处设置有扭力弹簧,通过第三弹簧39与送料板38的配合,当上一个芯片被取走后,送料板38将下一个待检测的芯片顶出,从而实现自动送料,从而避免人工送料,大大降低劳动强队,且降低了劳动力成本,再通过挡板40对芯片进行限位,第三弹簧39的劲度系数小于扭力弹簧的劲度系数,从而使得挡板40无论在何种状态下,均可以对芯片进行限位,从而避免芯片将挡板40顶起,从而使得第三弹簧39通过送料板38进行芯片的顶出时,不会将芯片顶出物料盒37,避免芯片掉落。
21.机座1上表面开设有滑动槽35,滑动槽35内阻尼滑动连接有滑块36,滑块36与物料盒37下表面固定连接,滑块36与滑动槽35的截面均为t字形,从而保证滑块36不会脱离滑动槽35,通过滑动连接使得物料盒37可以更换,从而更换不同规格的物料盒37,即可使得设备对不同型号的芯片进行检测,使得设备的实用性更强。
22.机座1上表面固定连接有正品盒34与次品盒33,正品盒34与次品盒33的截面均为开口朝上的凹字形,正品盒34与次品盒33内底壁高度均逐渐降低,如图1所示,正品盒34与次品盒33的地面均从靠近立柱2的方向向外部逐渐降低,且正品盒34与次品盒33侧壁均开设有孔,机座1周边可设置有输送带,从而使得落入正品盒34与次品盒33内的芯片在倾斜地面的作用下,通过通孔滑出,滑至传送带上,送至下一工序,负压盒20顶壁开设有平衡孔25,平衡孔25保证负压板21上方的空间为开放状态,从而使得负压板21可以自由的上下运动。
23.一种集成电路芯片平整度检测方法,包括以下步骤:s1、将待检测的芯片置于物料盒37内并放置在机座1上;s2、开启伺服电机6,通过伺服电机6驱动第一齿轮7转动,再通过第一齿轮7与内齿圈8的啮合带动转动块4转动,当吸盘24转动至物料盒37上方时,通过第一电磁铁26使得负压盒20内产生负压通过吸盘24先将芯片吸附,而后再向上运动,继续随转动块4转动;s3、转动至第一个检测仪32处时,首先对芯片的底面进行检测,当检测到不平整时,此时第二电磁铁31通电,使得导电块29与环形导电板28分开,从而使得第一电磁铁26断电,此时次品落入次品盒33;s4、底面检测合格后,芯片随转动块4继续转动,通过安装杆14转动,带动安装块16转动从而使得芯片转动90
°
,此时继续转动,对芯片的各个侧边进行平整对检测,检测不合格的落入次品盒33内;s5、侧边与底面检测均合格的芯片,落入正品盒34内进行收集;s6、检测合格的芯片收集后,吸附合格芯片的吸盘24随转动块4再次转动至物料盒37上方,吸附新的吸盘进行检测。
24.本发明中,将待检测的芯片置于物料盒37内并放置在机座1上,开启伺服电机6,为伺服电机6通入脉冲电流,且每个脉冲电流均会使得伺服电机6转动一圈,伺服电机6带动第一齿轮7转动,从而使得第一齿轮7带动与其啮合的内齿圈8转动,从而使得内齿圈8驱动转动块4转动,转动块4转动的过程中,当一个吸盘24运动至物料盒37上方时,此时该吸盘对应的导电块29与环形导电板28接触,使得对应的第一电磁铁26通电,对永磁体23产生磁吸力,在磁吸力作用下,负压板21上滑,将吸盘24内的空气抽入负压盒20内,使得吸盘将芯片吸附,而后负压板21将第二弹簧22压缩至极限状态,此时磁吸力则使得负压板21带动整个负压盒20上升,将芯片从物料盒37内取出;取出后,随着转动块4的继续转动,转动45
°
后,使得芯片与第一个检测仪32对齐,对芯片底面的平整度进行检测,检测完成后,转动块4继续转动45
°
,转动过程中,第二齿轮10通过与上环板11下表面的齿啮合,从而使得第二齿轮10带动转动轴9转动,从而使得与转动轴9过盈配合的蜗杆13转动,通过蜗杆13与蜗轮15的啮合,使得蜗轮15转动,从而使得蜗轮15通过安装杆14带动安装块16转动90
°
,从而使得整个负压盒20转动90
°
,使得芯片转动至竖直状态,同时,使得第三齿轮41与齿板42啮合,此时通过第二个检测仪32对芯片侧边的平整度进行检测,当该侧壁的检测完成后,转动块4继续转动45
°
;随着转动块4的继续转动,通过齿板42与第三齿轮41的啮合,使得整个负压盒20带动芯片转动,转动块4每转动45
°
,使得芯片转动90
°
,从而通过后续的三个检测仪32对芯片的不同侧边进行检测;当检测出不合格品时,检测仪32向plc电路发出指令,从而使得plc控制电路使得对应的第二电磁铁31通电,对对应的导电块29产生磁吸力,使得导电块29与环形导电板28分离,从而使得对应的第一电磁铁26断电,此时吸盘24失去吸力,从而使得芯片落入次品盒33内;当检测品完全合格后,随着转动块4的转动,直至转动时该吸盘24对的导电块29与环形导电板28分离时,此时第一电磁铁26断电,此时芯片落入正品盒34内,此时随着转动块4的继续转动,该吸盘再次转动至物料盒37上方,如上述步骤,继续吸附芯片进行检测,从而使得整个设备可以连续且自动化的对芯片进行检测。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。