1.本实用新型涉及一种消毒装置,具体涉及一种基于slam的智能无人消毒小车。
背景技术:
2.传统消毒方式主要通过人工喷洒消毒液来进行消毒灭菌,需要耗费大量的人力和时间,工作效率低,且很容易因人为因素造成消毒的盲区及死角,影响消毒效果,消毒机器人可以很好的解决该问题。消毒机器人可以自主的对消毒路径进行规划,成功避开遇到的障碍物并且精准的按照设计好的行走路线完成消毒工作。目前,市面上存在的大多数消毒车体积庞大,需要人员辅助来控制机器人内部的算法从而对机器人的行走过程进行导航,存在工作效率低、能耗大,尤其在外部场合的复杂地形使用时,现有的消毒机器人难以适应。
技术实现要素:
3.本实用新型的目的就是为了解决上述问题而提供一种基于slam的智能无人消毒小车。
4.本实用新型的目的通过以下技术方案实现:
5.一种基于slam的智能无人消毒小车,包括ros机器人底盘,所述ros机器人底盘两侧对称设置履带式驱动机构;
6.所述ros机器人底盘上设有障碍物感应单元;
7.所述ros机器人底盘上设有用于喷洒雾化消毒液的喷洒机构,包括升降支撑平台以及设于所述升降支撑平台上的消毒喷头,所述消毒喷头能够沿所述升降支撑平台上下移动。
8.本消毒小车用履带驱动方式能够适应更复杂的地形,并且可以原地掉头;消毒平台采用升降方式实现更大范围的无死角消毒,采用雾化喷头使消毒效率更高,消毒范围更广。
9.进一步地,所述履带式驱动机构包括设置在所述ros机器人底盘前、后方侧部的驱动轮、设置在侧部的多个支撑轮、以及包裹在所述驱动轮及支撑轮外侧的履带。
10.进一步地,所述支撑轮设有多个,按上下两排设置,并位于所述驱动轮之间。
11.进一步地,所述驱动轮与履带驱动电机连接,所述履带驱动电机连接设置在所述ros机器人底盘内部。
12.进一步地,所述障碍物感应单元包括摄像头(1)和雷达(2),所述摄像头(1)设于所述ros机器人底盘的前端,所述雷达(2)设于所述ros机器人底盘上部,所述障碍物感应单元与设于所述ros机器人底盘内的控制器连接,用于传递障碍物感知信息。整个小车的工作过程是先通过摄像头来对环境进行测绘,在树莓派中建立虚拟地图用来设置导航路线,这样就可以让小车通过设置路线进行消毒,如果在对高风险室内的地区或者程序自动难以到达的地方还可以用遥控器对小车进行远程的在线控制,手动对某一个地方进行精确的消毒。
13.进一步地,所述升降支撑平台包括升降支撑杆,所述升降支撑杆通过底座竖向固定在所述ros机器人底盘上,所述升降支撑杆上设有滑轨,所述滑轨上设有滑块,所述滑块上设置所述消毒喷头。
14.进一步地,所述滑块连接驱动部件(如升降电机的推杆),并在所述驱动部件的作用下沿所述滑轨上下升降移动,带动所述消毒喷头进行上下移动,进行大范围内无死角消毒。
15.进一步地,所述消毒喷头通过管路与设于所述ros机器人底盘上的消毒液容器连接,并通过设置的输送泵控制喷液。
16.进一步地,所述消毒喷头为能喷洒雾化消毒液的雾化喷头。
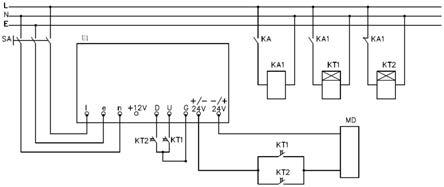
17.进一步地,所述消毒小车设置控制器,所述控制器的主控板采用树莓派主控板,所述消毒小车上还设置可以输入信息的显示屏。莓派主控板可进行总的计算和通讯,还可以用来链接手机,用小车上的显示屏对其程序进行编辑。利用树莓派的主板对驱动电机的控制版发出信号在由驱动电机的控制板对来控制电机从而驱动履带完成行进的动作,在这个板子上可以观察电压情况来判断电量等,在最后控制水泵,经过软管将消毒水抽出来在通过雾化喷头喷出。
18.与现有技术相比,本实用新型具有以下有益效果:
19.1、高风险区域远程控制进行无人消毒,避免消毒人员二次感染的风险。
20.2、代替清洁工人的消毒工作,减轻人力劳动的负担。
21.3、自动化消毒过程,保证消度区域的全面性。防止过度消毒,遗漏消毒的可能性。
22.4、结构易于拆卸,方便维护与维修。
23.5、可以远程控制,全天24小时运行。
24.6、广泛用于各种场合。
25.7、结构简单维修方便。
26.8、统一规格消毒容器更换方便,便于回收处理。
27.9、可与人一同协作,工作效率高。
附图说明
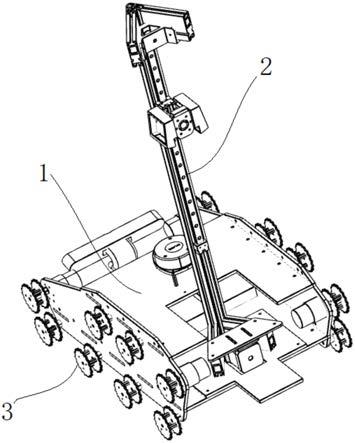
28.图1为本实用新型消毒小车的整体结构示意图;
29.图2为图1的主视结构示意图;
30.图3为图1的侧视结构示意图;
31.图4为图1的俯视结构示意图;
32.图5为喷洒机构的局部示意图。
具体实施方式
33.下面结合附图和具体实施例对本实用新型进行详细说明,实施例中未公开的内容,均采用本领域现有技术或公知的技术手段。
34.如图1-4,一种基于slam的智能无人消毒小车,包括ros机器人底盘1,ros机器人底盘1两侧对称设置履带式驱动机构3;ros机器人底盘1上设有障碍物感应单元;ros机器人底盘1上设有用于喷洒雾化消毒液的喷洒机构2,包括升降支撑平台以及设于升降支撑平台上
的消毒喷头21,消毒喷头21能够沿升降支撑平台上下移动。
35.具体地,履带式驱动机构3包括设置在ros机器人底盘1前、后方侧部的驱动轮31、设置在侧部的多个支撑轮32、以及包裹在驱动轮31及支撑轮32外侧的履带。本消毒小车用履带驱动方式能够适应更复杂的地形,并且可以原地掉头。消毒平台采用升降方式实现更大范围的无死角消毒,采用雾化喷头使消毒效率更高,消毒范围更广。
36.如图1、2、3,支撑轮32设有多个,按上下两排设置,并位于驱动轮31之间。驱动轮31与履带驱动电机33连接,履带驱动电机33连接设置在ros机器人底盘1内部。
37.如图5,升降支撑平台包括升降支撑杆,升降支撑杆通过底座竖向固定在ros机器人底盘1上,升降支撑杆上设有滑轨22,滑轨22上设有滑块23,滑块23上设置消毒喷头21。滑块连接驱动部件,如升降电机的推杆(图中未示出),并在驱动部件的作用下沿滑轨上下升降移动,带动消毒喷头21进行上下移动,进行大范围内无死角消毒。消毒喷头21通过管路与设于ros机器人底盘1上的消毒液容器连接,并通过设置的输送泵控制喷液,消毒喷头21为能喷洒雾化消毒液的雾化喷头。
38.障碍物感应单元包括摄像头5和雷达4,摄像头5设于ros机器人底盘1的前端,雷达4设于ros机器人底盘1上部,障碍物感应单元与设于ros机器人底盘1内的控制器连接,用于传递障碍物感知信息。整个小车工作过程是先通过摄像头来对环境进行测绘在树莓派中建立虚拟地图用来设置导航路线这样就可以让小车通过设置路线进行消毒,如果在对高风险室内的地区或者程序自动难以到达的地方我们还可以用遥控器对小车进行远程的在线控制,手动对某一个地方进行精确的消毒。
39.消毒小车设置控制器,控制器的主控板采用树莓派主控板,消毒小车上还设置可以输入信息的显示屏。树莓派主控板可进行总的计算和通讯,还可以用来链接手机,用小车上的显示屏对其程序进行编辑。利用树莓派的主板对驱动电机的控制版发出信号在由驱动电机的控制板对来控制电机从而驱动履带完成行进的动作,在这个板子上可以观察电压情况来判断电量等,在最后控制水泵,经过软管将消毒水抽出来在通过雾化喷头喷出。
40.智能消毒小车的主体是rosrobot operating system程序控制地盘履带电机使履带实现前进后退转弯和原地掉头等高难度动作。这是一个适用于机器人开源的元操作系统,提供操作系统应有的服务,包括硬件抽象,底层设备的控制,常用函数的实现,进程间消息传递,还有ros里程反馈功能,差分驱动,动态pid参数调节,imu角速度功能,可实现线速度和角速度进行矫正,并修改参数及imu矫正。本实用新型消毒小车构建地图使用的是雷达进行slam地图构建摄像头导航,还可以使用摄像头巡线功能这是基于摄像头巡线。激光slam是通过直接获取环境中的点云数据,根据生成的点云数据,测算哪里有障碍物以及障碍物的距离。但是基于单目、双目、鱼眼摄像机的视觉slam方案,则不能直接获得环境中的点云,而是形成灰色或彩色图像,需要通过不断移动自身的位置,通过提取、匹配特征点,利用三角测距的方法测算出障碍物的距离,进行导航以及避障等工作。
41.上述的对实施例的描述是为便于该技术领域的普通技术人员能理解和使用实用新型。熟悉本领域技术的人员显然可以容易地对这些实施例做出各种修改,并把在此说明的一般原理应用到其他实施例中而不必经过创造性的劳动。因此,本实用新型不限于上述实施例,本领域技术人员根据本实用新型的揭示,不脱离本实用新型范畴所做出的改进和修改都应该在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。