1.本发明涉及智慧物流技术领域,尤其涉及一种机器人控制装置。
背景技术:
2.运送机器人可用于大型室内场景的货物运输,可提高运输效率,降低人力成本。在目前的机器人控制装置中,各种传感器控制器和运动控制器采用一条can(controller area network,控制器局域网)总线相互通信,一般通过将can数据转换为usb(universal serial bus,通用串行总线)数据实现与主控制器的通信。
3.在实现本发明的过程中,发明人发现现有技术至少存在以下问题:第一,usb接口机械固定不牢靠,长时间使用有可能松动,并且usb协议层数据在某些情况下会出现延时,造成can总线阻塞,影响机器人运行。第二,在现有的机器人控制装置中,传感器信号等较低电平的信号与运动控制信号等较高电平的信号使用同一can总线传输,容易产生耦合进而影响控制功能。
技术实现要素:
4.有鉴于此,本发明实施例提供一种机器人控制装置,能够将较低电平的信号与较高电平的信号相互隔离以保证控制功能,并且在各控制器与主控制器的通信过程中避免使用usb接口。
5.为实现上述目的,本发明提供了一种机器人控制装置。
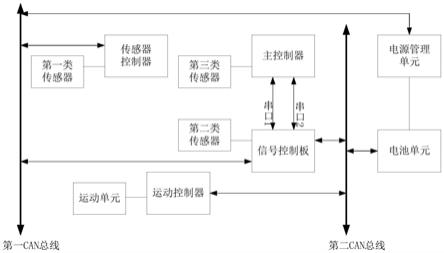
6.本发明实施例的机器人控制装置包括:主控制器、信号控制板、传感器控制器和运动控制器;其中,所述传感器控制器挂载到第一can总线,并与至少一个传感器连接;所述运动控制器挂载到第二can总线,并与至少一个运动单元连接;所述信号控制板分别与第一can总线、第二can总线以及所述主控制器连接,执行所述主控制器的串行通信接口的串口数据、与第一can总线和第二can总线的can数据之间的转换。
7.可选地,所述串行通信接口包括rs232接口或者串行外设接口spi接口;以及,所述信号控制板对所述串口数据进行电平转换,形成通用异步收发传输器uart数据;对所述uart数据进行协议转换,形成所述can数据;所述信号控制板对所述can数据进行协议转换,形成所述uart数据;对所述uart数据进行电平转换,形成所述串口数据。
8.可选地,所述信号控制板包括:用于执行所述协议转换的控制器件、用于执行所述电平转换的电平转换电路、与第一can总线连接的第一can收发器、与第二can总线连接的第二can收发器、以及第一can收发器和第二can收发器的供电电路。
9.可选地,第一can收发器和第二can收发器通过光耦与所述控制器件连接,所述光耦的发光器部分连接限流电阻,所述光耦的受光器部分连接上拉电源。
10.可选地,第一can收发器和第二can收发器的供电电路包括:斩波器件、变压器、整流器件和稳压器件;其中,所述斩波器件将直流电源信号转换为交流信号,所述变压器对所述交流信号进行变换,所述整流器件将变换之后的交流信号转换为直流信号,所述稳压器
件对所述直流信号进行稳压后输入第一can收发器或第二can收发器。
11.可选地,第一can总线上进一步挂载电源管理单元,第二can总线上进一步挂载电池单元。
12.可选地,所述传感器控制器连接的传感器为第一类传感器,所述信号控制板进一步连接多个第二类传感器,所述控制器件进一步用于控制第二类传感器。
13.可选地,第一类传感器包括:超声波传感器,第二类传感器包括:靠桩通讯红外传感器、安全触边传感器和防跌落传感器。
14.可选地,所述运动单元包括:轮伺服电机,所述运动控制器包括伺服电机驱动器,所述控制器件包括单片机。
15.可选地,所述串行通信接口包括:对应第一can总线的第一串口和对应第二can总线的第二串口;所述主控制器进一步连接激光雷达、惯性导航单元和避障相机。
16.根据本发明的技术方案,上述发明中的实施例具有如下优点或有益效果:
17.将对应较低电平信号的传感器控制器、信号控制板和电源管理单元挂载在第一can总线,将对应较高电平信号、对实时性要求较高的运动控制器和电池单元挂载到第二can总线(不同于第一can总线),从而实现两种不同信号及控制器在传输通道和电气上的隔离,由此提高机器人控制性能。为避免主控制器与各控制器通信过程中使用usb接口,在信号控制板实现can数据到串口数据的转换,从而用串口代替usb接口,解决了目前机器人控制系统中usb接口不牢固以及因接口延时造成的堵塞问题,并且,以上方式不需要增加can与串口转换的新模块,与增加新模块相比也会减少can收发器的使用数量。
18.上述的非惯用的可选方式所具有的进一步效果将在下文中结合具体实施方式加以说明。
附图说明
19.附图用于更好地理解本发明,不构成对本发明的不当限定。其中:
20.图1是本发明实施例中机器人控制装置的第一原理示意图;
21.图2是本发明实施例中机器人控制装置的第二原理示意图;
22.图3是本发明实施例中机器人控制装置的第三原理示意图;
23.图4是本发明实施例的数据流示意图。
具体实施方式
24.以下结合附图对本发明的示范性实施例做出说明,其中包括本发明实施例的各种细节以助于理解,应当将它们认为仅仅是示范性的。因此,本领域普通技术人员应当认识到,可以对这里描述的实施例做出各种改变和修改,而不会背离本发明的范围和精神。同样,为了清楚和简明,以下的描述中省略了对公知功能和结构的描述。
25.需要指出的是,在不冲突的情况下,本发明的实施例以及实施例中的技术特征可以相互结合。
26.图1-3是根据本发明实施例的机器人控制装置的原理示意图,如图1-3所示,本发明实施例的机器人控制装置可以包括:主控制器、信号控制板、传感器控制器和运动控制器。
27.其中,本发明实施例的机器人可以是各种用途的机器人如运送机器人、工业机器人等。主控制器是机器人的控制中枢,是居于顶层的决策单元,用于对业务和逻辑进行复杂调度。传感器控制器和运动控制器是居于底层的决策单元,用于对传感器数据、运动控制数据等进行简单判断和决策。实际应用中,大量决策需要在主控制器的控制下完成,某些对时效性要求较高的决策可以由传感器控制器和运动控制器直接执行而不经过主控制器。信号控制板具有两方面的作用,一方面具有类似于传感器控制器的控制功能,对连接的传感器进行数据采集、控制和决策,另一方面具有协议转换和电平转换的功能(这方面内容将在下文说明)。
28.例如,基于安全触边传感器的急停决策即可以由信号控制板直接向运动控制器发送指令来完成,不需经过主控制器,由此保证时效性。具体场景中,主控制器可以采用x86架构实现,也可以采用arm(advanced risc machine,一种微处理器)架构实现,还可以使用fpga(field-programmable gate array,现场可编程门阵列)等任何适用方式实现。信号控制板、传感器控制器和运动控制器可以用单片机等方式实现,传感器控制器和信号控制板可以连接传感器,运动控制器可以连接运动单元。图2、3中的x86架构计算平台即表示特定场景下的一种主控制器,超声波传感器控制板即属于传感器控制器。左侧轮伺服驱动器和右侧轮伺服驱动器都是伺服电机驱动器,二者都属于运动控制器。分别与左侧轮伺服驱动器和右侧轮伺服驱动器连接的左侧轮伺服电机和右侧轮伺服电机都属于运动单元。
29.在目前的机器人控制装置中,一般将传感器控制器和运动控制器连接到同一can总线进行通信,由于这两种控制器的信号电平以及对实时性的要求存在较大差异,即传感器信号的电平较低、对实时性要求相对较低,运动控制信号的电平较高,对实时性要求较高,因此以上布置方式会造成相互干扰,影响机器人控制性能。针对这一问题,本发明在机器人控制装置中设计两条can总线,将传感器控制器挂载到第一can总线,将运动控制器挂载到第二can总线,由此实现两种不同信号的解耦,保证机器人控制性能。
30.can是一种用于实时应用的串行通讯协议总线,它可以使用双绞线来传输信号,是世界上应用最广泛的现场总线之一。can协议可以用于汽车中各种不同元件之间的通信,以此取代昂贵而笨重的配电线束。该协议的健壮性使其用途延伸到其它自动化和工业应用。can协议的特性包括完整性的串行数据通讯、提供实时支持、传输速率高达1mb/s、同时具有11位的寻址以及检错能力。
31.在现有的机器人控制系统中,为了使挂载到can总线的设备能够与主控制器通信,一般需要将can总线连接专用的can与usb转换模块,将can数据转换为usb数据来与主控制器通信,如前述,这种方法的usb接口不牢固并且容易因usb接口延时产生堵塞。为了避免使用usb接口,本发明在以上信号控制板中增加了can数据与串口数据相互转换的功能(信号控制板原先即有传感器控制功能),并利用信号控制板通过串行通信接口与主控制器通信,从而以串口代替现有的机器人控制装置中的usb接口以解决以上问题。示例性地,以上串行通信接口可以是rs232接口或者spi(serial peripheral interface,串行外设接口)接口。
32.在本发明实施例中,可以首先将信号控制板连接到第一can总线,由此实现信号控制板及其连接的传感器通过第一can总线与其它设备通信的功能,此外,还可以在信号控制板中增加can收发器,使信号控制板与第二can总线连接,同时使信号控制板与主控制器之间通过串口连接。即,在信号控制板中设计第一can收发器和第二can收发器,分别来连接第
一can总线和第二can总线,在信号控制板中设计对应第一can总线的串口1和对应第二can总线的串口2,分别连接主控制器上的第一串口和第二串口(第一串口对应于第一can总线,第二串口对应于第二can总线),从而实现第一can总线与第二can总线在整个链路的数据隔离。
33.信号控制板通过以下方式执行串口数据到can数据的转换:信号控制板首先对串口数据进行电平转换,形成uart(universal asynchronous receiver/transmitter,通用异步收发传输器)数据。实际场景中,信号控制板可以通过已知的电平转换电路将正负15v的串口电平(以rs232为例)转换为零到3.3v的uart电平。接着,信号控制板对uart数据进行协议转换,形成can数据,即首先将uart数据解析成原始数据,之后按照can协议将原始数据重构,形成can数据。
34.类似地,信号控制板通过以下方式执行can数据到串口数据的转换:信号控制板首先对can数据进行协议转换,形成uart数据,即首先将can数据解析成原始数据,之后按照uart协议将原始数据重构,形成uart数据。接着,信号控制板对零到3.3v的uart数据进行电平转换,形成正负15v的串口数据。实际应用中,信号控制板可以通过内部的控制器件(例如单片机)实现以上协议转换,通过内部的电平转换电路实现以上电平转换。较佳地,以上电平转换电路可以包括对应于第一can总线的第一电平转换电路和对应于第二can总线的第二电平转换电路,从而提高两路can总线的隔离效果。这样,能够基于信号控制板通过分别与两路can总线连接(以及与主控制器的连接)以及can数据与串口数据的转换最终实现两路can总线与主控制器基于串口的通信,由此避免usb接口带来的诸多缺陷,并且保证两路can总线的相互隔离以提高机器人控制性能。
35.实际应用中,以上传感器控制器与信号控制板均挂载在第一can总线执行传感器控制和决策功能,传感器控制器可以连接第一类传感器,信号控制板可以连接第二类传感器。可以理解,在以上第一类传感器、第二类传感器和以下将要说明的第三类传感器中,“第一”、“第二”、“第三”等在本文中用于描述各种对象,但这些对象不受上述术语限制。上述术语仅用于将一个对象与另一个对象区分,并不具有实质性含义。举例而言,在不脱离本发明范围的情况下,可以将第一类传感器称为第二类传感器,也可以将第二类传感器称为第一类传感器,第一类传感器与第二类传感器都是传感器,但二者不是同一类型的传感器。具体应用中,第一can总线还可以挂载连接温度传感器、湿度传感器等环境采集传感器的控制器。
36.在一个实施例中,第一类传感器可以包括:用于机器人避障的超声波传感器,第二类传感器可以包括:靠桩通讯红外传感器(即图2、3中的靠桩通讯红外对管,用于机器人与充电桩之间的感应和通信)、安全触边传感器(用于急停感应)和防跌落传感器(用于跌落感应)。第三类传感器是主控制单元直接连接的传感器,其可以是激光雷达、惯性导航单元imu和避障相机。以上各种传感器的使用数量可以根据需要灵活选取。除了执行传感器控制和决策,信号控制板还用于实现两路can总线的can数据与串口数据的转换,由此实现can总线与主控制器基于串口的通信。
37.需要说明的是,通过在信号控制板上实现can与串口的转换进而实现两路can总线与主控制器的通信,与直接在机器人控制装置中增加can与串口转换的新模块相比(新模块中需要两个can收发器),由于信号控制板中初始即与一路can总线连接,因此只需增加一个
can收发器和辅助电路即可,从而减少can收发器的使用数量,使得电路更加简单和紧凑。
38.实际应用中,考虑到电源管理单元(其用于为各控制器、传感器和运动单元供电)的电平以及对实时性的要求与传感器类似,可以在第一can总线上进一步挂载电源管理单元,也可以根据需要在第一can总线上挂载具有同样特征和要求的其它功能模块。类似地,考虑到电池单元(如图2、3中的锂电池,电池单元与电源管理单元连接)的电平以及对实时性的要求与运动控制器类似,可以在第二can总线上进一步挂载电池单元。这样,第一can总线上挂载有对应较低电平和低实时性要求的传感器控制器、信号控制板和电源管理单元,第二can总线上挂载有对应较高电平和高实时性要求的运动控制器和电池单元。
39.参见图3,图3示出了信号控制板的内部结构,具体包括:单片机(即控制器件)、第一can收发器及其供电电路、第二can收发器及其供电电路以及分别对应于第一can总线和第二can总线的两个电平转换电路(即uart转rs232电路),两个电平转换电路的串口分别是rs232串口1和rs232串口2。单片机与靠桩通讯红外传感器、安全触边传感器和防跌落传感器连接。
40.较佳地,第一can收发器和第二can收发器通过光耦与单片机连接,从而实现can收发器与单片机之间的信号隔离。以第一can收发器为例,其信号输出端经过限流电阻(即电阻r)进入光耦的发光器部分,光耦的受光器在上拉电源的作用下连接到单片机的信号输入端(can1_rx)。同样的,单片机的信号输出端(can1_tx)通过类似电路结构连接到第一can收发器的信号输出端。
41.在一个可选的技术方案中,第一can收发器和第二can收发器的供电电路包括:斩波器件(如变压器驱动器)、变压器、整流器件(即整流电路)和稳压器件(即稳压器)。其工作原理为,斩波器件将电源管理单元提供的直流电源信号转换为交流信号,变压器对交流信号进行变换,整流器件将变换之后的交流信号转换为直流信号,稳压器件对该直流信号进行稳压后输入第一can收发器或第二can收发器。其中,以上变压器能够实现电源与can收发器之间的电气隔离。
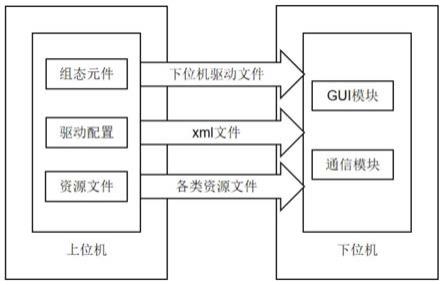
42.图4是本发明实施例的数据流示意图,如图4所示,两种数据通过彼此隔离的链路进入主控制器实现独立工作,其中的一路数据为电平和实时性要求较低的传感器数据和功能模块数据(如电源管理单元的数据),这路数据通过第一can总线和第一串口进入主控制器。另一路数据为电平和实时性要求较高的运动控制数据和电池数据,这路数据通过第二can总线和第二串口进入主控制器。
43.在本发明实施例的技术方案中,针对机器人底层控制与各控制器通信方式进行改进,底层传感器、传感器控制器、信号控制板和电源管理单元挂载在一路can总线,对实时性要求较高的运动单元、运动控制器和电池单元挂载在另一路can总线,并且通过信号控制板执行rs232串口与can总线的转换,从而使主控制器与can总线上挂载的器件通过串口进行通信,由此实现传感器数据及功能模块数据(如电源管理单元数据)、与运动控制数据及电池数据在传输通道和电气上的隔离,并且改善usb接口延时造成的阻塞问题。
44.上述具体实施方式,并不构成对本发明保护范围的限制。本领域技术人员应该明白的是,取决于设计要求和其他因素,可以发生各种各样的修改、组合、子组合和替代。任何在本发明的精神和原则之内所作的修改、等同替换和改进等,均应包含在本发明保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。