一种基于svm油压状态识别的液压棘轮扳手自动判停方法
技术领域
1.本发明属于自动化控制技术领域,涉及液压棘轮扳手控制技术,具体涉及液压棘轮扳手判停方法。
背景技术:
2.液压棘轮扳手通过对螺栓的循环拧操作来实现对螺栓的紧固作业,液压泵站作为液压棘轮扳手的驱动装置,通过输出高冲击压力的专用液压油来为棘轮扳手提供动力。因此泵站对于扳手的控制起到关键的作用,主要包括扳手工作的启停控制、扳手的驱动力大小的控制。
3.目前,市场上的液压泵站在驱动扳手自动化作业时多配合扭矩传感器联动工作,通过扭矩传感器来实时测量螺栓所受扭矩,以无线传输的方式将扭矩数值转化为无线信号传递给泵站控制cpu,当螺栓受到扭矩达到预设的目标扭矩大小时,泵站电磁阀闭合,液压棘轮扳手停止作业。
4.这种基于扭矩检测的液压扳手判停方法主要存在以下缺点:1.扭矩传感器多装备在扭矩套筒中,扭矩套筒在扳手紧固作业中不仅起到传递扭矩的作用同时他还能实时的测量螺栓所受扭矩大小,但套筒比较笨重,当操作工人需要紧固多个所处位置不同螺栓时,其也需要多次对套筒位置继续变动,比较繁琐极大的影响工作效率。2.扭矩套筒通过无线的方式将扭矩数据传递给泵站控制cpu,此过程容易受到外在环境的干扰导致传输存在延时,也受到泵站与套筒之间距离的限制,会影响泵站对扳手的自动化作业准确性。
5.与上述基于扭矩检测的扳手判停方法相比,公开号为cn112388552a的专利文献公开的基于油压波形相似度分析的液压扳手判停方法更具有进步性,该方法基于油压信号的分析实现对是否停止扳手作业的判断。在螺栓的紧固过程中某一次泵站加压周期扳手活塞的运动过程主要存在三个状态阶段,第一个阶段是活塞在正向行程起点保持静止(此过程克服螺栓开始转动所需的扭矩,泵站有输出但没做功,螺栓扭矩保持不变且大于扳手的输出扭矩),第二个阶段是活塞开始正行程直到活塞移动到行程终点(此过程扳手驱动轴在活塞推动下旋紧螺栓,泵站做有用功,扳手的输出扭矩与螺栓扭矩等大反向),第三个阶段是活塞在行程终点保持静止(待泵站油压加至目标值开启下次循环,泵站有输出但没做功,螺栓扭矩保持不变),该方法是控制泵站恒定输出油压的模式下工作,不能够在识别到活塞移动到行程终点时立马开启下个油压周期即活塞运动状态第三个阶段没有避免,使得泵站工作过程中还存在很多的无用功,这是导致泵站工作效率低的主要原因,且可以发现泵站所做的无用功阶段大多为高压输出阶段,对扳手的损耗较为严重不利于延长扳手的使用寿命。
6.液压棘轮扳手的工作过程是泵站反复加压-回油的过程,因此用液压泵站驱动液压棘轮扳手作业时,其输出油压的波形为脉冲波形,每次加压周期形成一个脉冲。
7.螺栓坚固的整个过程可以分为两个阶段,第一个阶段是从开始旋转螺母到螺母开始进入紧固状态,这个阶段称为空载阶段;第二个阶段是从开始进入紧固状态到达到目标
预紧力,这个阶段称为紧固阶段。
技术实现要素:
8.本发明目的是针对现有通过监测扳手扭矩来判断板手是否应当停止的方式及其他扳手判停方法存在的上述不足,提供一种通过识别泵站输出油压状态来判断泵站是否应当停止驱动扳手的控制方法。
9.为实现上述目的,本发明采用如下技术方案:一种基于svm(支持向量机)油压状态识别的液压棘轮扳手自动判停方法,该方法用于判断液压泵站何时应当停止对液压棘轮扳手的驱动,包括是否开启判停的判断和是否停止扳手作业的判断;针对螺栓的空载阶段,设置液压泵站的空载工作模式,液压泵站在空载工作模式下,最大输出油压设定为扳手空载驱动油压p1,针对螺栓的紧固阶段,设置液压泵站的紧固工作模式,液压泵站在紧固工作模式下,最大输出油压设定为螺栓预紧目标油压p2,是否开启判停的判断:在螺栓的空载阶段,控制泵站工作在空载工作模式下,通过svm模型对每一个的加压周期的实时油压状态标签进行识别,当识别到油压状态标签为1时,表示螺栓进入紧固阶段,则转变泵站的工作模式为紧固工作模式,并开启是否停止驱动扳手作业的判断;是否停止驱动扳手作业的判断:在螺栓进入紧固阶段后,通过svm模型继续对每一个的加压周期的实时油压状态标签进行识别,若识别到油压状态标签为1且一直保持到实时油压达到p2,那么实时油压达到p2时泵站停止驱动液压棘轮扳手作业。具体包括如下步骤:步骤s0:训练svm模型;步骤s1:开启液压泵站驱动液压棘轮扳手作业,泵站反复执行从0开始的加压过程,同时实时监测液压泵站输出油压波形;步骤s2:从第一次加压开始,轮询采集n个连续的油压数据(单次采集数据的数量可以调整,优选10个),并计算其特征值,将实时计算的特征值输入到训练好的svm模型中进行分类,得到实时油压状态标签;步骤s3:若在一个加压周期中油压状态标签一直为-1则在油压达到扳手空载驱动油压p1时开启下一个加压周期;若在一个加压周期中油压达到p1前识别到油压状态标签从-1变为1,则开始执行步骤s4,此时螺栓进入紧固阶段;步骤s4:在步骤s3最后一个加压周期基础上继续加压,若在油压达到p2之前油压状态标签由1变为-1,则开启下一个新的加压周期,若在在油压达到p2之前油压状态标签一直保持为1则油压达到p2时停止泵站工作;在新开启的加压周期中,若在油压达到p2之前油压状态标签由-1变1再变为-1,则开启下一个加压周期,若在油压达到p2前油压状态标签由-1变为1后一直保持为1,则在油压达到p2时停止泵站工作。
10.进一步地,在步骤s1中,使用传感器实时采集泵站输出油压数据,并将数据传递给泵站cpu。
11.进一步地,步骤s2包括:步骤s2-1:从第一次加压开始,泵站cpu按设定采样频率t1对实时采集的泵站输出油压数据进行采样,并对采样取得的数组(数组采用轮询赋值的方式保证数组中为最新采集的10个油压数据点)进行存储;
步骤s2-2:对于实时采集到的10个油压数据点,分别计算其均值(μ)、标准差(σ)、偏度(sk)、变异系数(cv)及平均斜率(kp);步骤s2-3:实时将最新的μ、σ、sk、cv、kp导入到训练好的svm模型中进行分类,得到实时油压状态标签。
12.进一步地,均值计算公式如式(1):
ꢀꢀꢀꢀꢀꢀ
(1)其中为 油压数据点, 为油压数据均值, 为数据点的个数;标准差计算公式如式(2):
ꢀꢀꢀꢀꢀꢀꢀꢀ
(2)其中 为油压数据标准差;偏度计算公式如式(3):
ꢀꢀꢀꢀꢀꢀ
(3)其中sk为油压数据偏度;变异系数计算公式如式(4):
ꢀꢀ
(4)其中cv为变异系数;平均斜率计算公式(5):
ꢀꢀ
(5)其中kp为平均斜率。
13.在本发明中,虽然选用了均值μ、标准差σ、偏度sk、变异系数cv、平均斜率kp5个特征值代表样本的属性,但实际上,其余可能的数据特征值在本方法中的运用也在专利保护的范围内,对于特征值选取的方法在本方法中的运用同样也在专利保护的范围内。
14.本发明所述的液压棘轮扳手判停方法,包括对泵站的输出油压数据的实时采集和实时特征值提取,通过svm(支持向量机)对油压状态标签的识别间接完成对螺栓是否达到预紧状态的判断从而实现对液压棘轮扳手的自动判停控制。整个方法,开始工作时由于螺栓处于很松的状态扳手首先进入空载工作阶段,该阶段泵站的输出最大油压为扳手空载驱动油压p1,在泵站0~p1循环加压周期中,如果识别的油压状态标签一直为-1,则在实时油压达到扳手空载驱动油压p1时(活塞必定完成整个正行程)开启下个加压循环;如果识别到油压状态标签由-1变为1,则说明扳手从空载阶段进入紧固阶段,由此开启是否停止扳手作业的判断。在螺栓紧固阶段,当识别到油压状态标签一直为1且实时油压达到螺栓预紧目标油压p2时扳手停止工作,当油压状态标签由-1变为1再变为-1时,说明活塞已完成正向行程且开始保持静止泵站做无用功,此时及时开启下次加压周期。通过基于svm(支持向量机)油压状态识别的扳手判停方法,在空载阶段泵站以扳手空载驱动油压p1为目标值驱动扳手使螺栓快速进入紧固阶段,在紧固阶段通过svm(支持向量机)模型实时识别检测油压状态标
签是否存在由1变为-1这一变化(扳手活塞移动至行程终点)来自适应的开启下一次加压周期,减去了泵站在驱动液压工具紧固螺栓过程中存在的大量无用功,相较于油压波形相似度判停算法的恒定目标油压工作模式大大提高了泵站的工作效率;通过在油压状态标签一直为1过程监测实时油压是否达到目标油压从而实现扳手的准确判停。由于该算法有效的避免了加压周期油压波形中存在的无用功的高压段从而能够减少扳手在高压下的使用次数延长扳手的使用寿命;同时该方法对于螺栓预紧状态的识别仅需通过对泵站输出油压数据分析即可,避免了扳手自动化作业时必须配备扭矩传感器的条件,避免了由于扭矩数据无线传输过程存在的干扰对泵站精准判停的影响,减少了在扳手紧固作业中操作工人的工作量。
附图说明
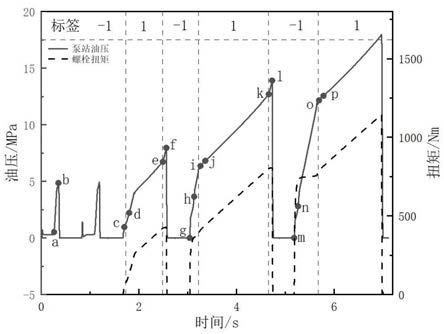
15.图1是泵站输出油压曲线与螺栓实时扭矩曲线。
16.图2是扳手活塞位移曲线。
17.图3是svmmodel具体参数。
18.图4是实际测试泵站工作油压曲线。
19.图5是扳手活塞位移曲线。
20.图6是抽样样本识别结果。
具体实施方式
21.参照图1-2,在前两个循环加压周期,螺栓处于较松的状态还未进入紧固阶段扭矩一直为0,扳手相当于空负载驱动,此过程泵站的输出油压波形较为平稳未发生明显改变,泵站不做功;第三个周期开始螺栓进入紧固阶段,一直持续到第五个加压周期螺栓达到预紧扭矩完成紧固,第三、四个加压周期中开始加压时油压上升很快分别持续到t1、t3时刻,此过程泵站的输出油压所对应的扳手输出扭矩一直小于螺栓开始旋动的扭矩,扳手活塞在行程的起点保持静止,泵站有输出无做功;第三、四个加压周期中t1、t3时刻后泵站的输出油压上升速度明显减小,斜率明显降低分别一直持续到t2、t4时刻,此过程扳手活塞开始正行程并移动至行程终点完成对螺栓的一次拧操作,泵站做有用功;第三、四个加压周期中t2、t4时刻后泵站油压快速上升至目标油压,此过程扳手活塞在行程终点保持静止泵站有输出无做功,可以发现第三、四加压周期泵站输出油压波形呈差异明显的三段,其中第二段油压泵站做有用功;第五个加压周期紧固完成周期,活塞运动状态同前述一致先在行程起点保持静止泵站油压快速上升而后泵站油压缓慢上升活塞开始正行程,在行程某一位置处输出油压达到螺栓预紧目标油压对应扳手的输出扭矩值等于螺栓扭矩值,螺栓完成紧固。可以发现泵站在紧固阶段最后一次加压周期泵站输出油压曲线呈差异明显的两段,其中第二段做有用功。
22.在本发明中将不同油压段的油压特征定义为一个油压状态,将螺栓紧固阶段一个加压周期的油压波形中第二段所对应的油压状态标签表示为1,将第一段及第三段所对应的油压状态,以及螺栓空载阶段的油压波形所对应的油压状态标签表示为-1。svm(支持向
量机)模型在机器学习领域中,是一个有监督的学习模型,通常用来进行模式识别、分类以及回归分析,应用到本发明中,则可通过svm模型根据一小段油压数据的多个特征值来识别得出对应的油压状态标签,这里主要用到了svm模型进行二分类识别,依此来设计本发明的判停算法。
23.判停算法主要为:建立svm模型对每一次的泵站加压周期中油压状态标签进行识别,当油压状态标签一直为1且泵站实时油压达到螺栓预紧目标油压来判断螺栓已经达到预紧状态,按照此种关系来设计判停算法。
24.在是否开启判停判断阶段当svm未识别到油压状态标签为1(即油压状态标签一直为-1)且油压达到扳手空载驱动油压p1时开启下次p1加压周期;在是否停止驱动扳手作业阶段某一次加压周期中当svm(支持向量机)模型识别到油压标签由1变为-1时开启下个加压周期;若svm(支持向量机)模型识别到的油压标签一直为1且保持到实时油压等于螺栓预紧目标油压p2时停止泵站对扳手的驱动。
25.实施本发明的判停算法,具体包括如下步骤:步骤s0:svm模型训练。
26.步骤s0-1:多次实验得到训练测试所要用到的数据集(油压特征值和对应标签)。
27.步骤s0-2:在matlab软件中通过将多次试验得到训练数据集用于训练svm模型,通过参数寻优算法找到最佳的c(惩罚系数)和g(rbf函数作为核函数所自带的一个参数,隐含地决定了数据映射到新的特征空间后的分布)。
28.步骤s0-3:用最佳c,g及训练数据来训练得到svm模型参数:model结构体(结构体包含一些参数如图3所示)。
29.步骤s1:开启液压泵站驱动液压棘轮扳手作业,泵站反复执行从0开始的加压过程,传感器实时采集泵站输出油压数据,并将数据传递给泵站控制cpu。
30.步骤s2:实时油压状态标签监测。
31.步骤s2-1:设置采样频率为t1,泵站cpu对实时油压数据进行采样,连续10个数据保存为一个数组。
32.步骤s2-2:对数组中的数据进行求平均值、标准差、偏度、变异系数及平均斜率。
33.步骤s2-3:将计算获得的平均值、标准差、偏度、变异系数及平均斜率导入svm模型中进行分类,得到实时油压状态标签;步骤s3:是否开启判停的判断若在一个加压周期中油压状态标签一直为-1则在油压达到p1时开启下一个加压周期,若在一个加压周期中油压达到p1前识别到油压状态从-1变为1,则继续加压并开启是否停止驱动扳手作业的判断;步骤s4:是否停止驱动扳手作业的判断在加压周期中若油压达到p2之前油压状态标签由1变为-1,则开启下一个加压周期,若在一个加压周期中油压达到螺栓预紧目标油压p2前分类结果一直保持为1则油压达到p2时停止泵站工作。
34.步骤s0-1中,以型号2xlct-5的液压扳手,三级流量扳手泵,m30螺栓为例。在多个目标油压下进行多次实验(每一次实验均在泵站恒定目标油压的工作模式下循环加压,工作到螺栓拧不动为止),取每一次完整紧固作业中的所有油压数据,根据加压周期中油压斜
率突变的数据点(油压拐点)将油压分段,并对每段的油压数据进行多个特征值的计算并根据该油压段对应的扳手活塞所处阶段对该组特征数据赋予标签。得到训练数据集如下表所示:其中,特征值及标签均作为svm模型的输入,一组特征值和对应标签为一个样本训练数据此处样本数为36。(对应不同的工况在使用该算法实现扳手判停控制前最好分别对模型进行训练,不同的工况对于螺栓紧固过程的难易程度影响因素有很多)。
35.步骤s0-2中,在matlab软件中导入数据集,并将数据集的顺序打乱,取前30组数据作为训练集,后6组数据作为测试集,利用训练集数据对c,g参数进行寻优对模型进行训练,利用测试集对训练好的模型进行实验验证。通过交叉验证寻优算法,寻找对最优c,g参数,即给定c,g在
ꢀ‑
之间任意值,将训练数据集划分为5等分,其中一份用来作为测试集,四份用来作为训练集,得出一个分类准确率,取得到分类准确率最高情况下的c,g作为最优参数,c为4,g为0.4353。
36.步骤s0-3中,利用已有的c,g参数和训练集对svm模型进行训练,得出svm模型model结构体,其中具体参数如图3所示,其最终的决策树函数如式(6):(6)其中b为-model.rho;n代表支持向量的个数即model.totalsv;对于每一个i,wi为model.sv_coef(i)支持向量系数,xi为model.svs(i,:)支持向量,x为待预测标签样本,gamma就是-g参数,最后利用svm模型对测试集数据进行预测,通过将预测结果与已知标签进行比对得出准确率为100%,可验证模型准确。
37.步骤s1中,在泵站出油口安装一高压传感器,由泵站控制盒为其供电,泵站上电后,传感器处于开启状态,实时测量泵站出油口油压。
38.步骤s2中,设置cpu采样频率为6ms,在泵站每一次加压的过程中,对传感器实时传输的数据进行间隔6ms采样。为了保证数据的准确性采用平均滤波算法,每3个点取一次均值保存于数组中,创建一个10容量的数组用于存储最新采集到的油压数据点。对实时得到的10容量的数组进行特征值提取,并将特征值作为模型的输入进行实时分类得出油压的状态标签。
39.步骤s3,s4中,对油压状态标签实时监控,若实时油压达到扳手空载驱动油压p1前油压状态标签一直为-1,在油压达到扳手空载驱动油压p1时开启下一次p1加压循环;若实时油压达到p1前,油压状态标签变为1说明螺栓开始旋紧,开启是否停止扳手作业的判断,在实时油压达到螺栓预紧目标油压p2前若油压状态标签一直为1那么在油压达到p2时螺栓紧固完成可停止扳手作业,若由1变为-1则可开启下一次加压循环。扳手空载驱动油压p1是用来快速完成扳手空转过程的,很小的压力,油压大小以能够克服扳手自身的阻尼为条件;螺栓预紧目标油压p2为螺栓达到目标扭矩所需的泵站输出油压。
40.下面是本发明判停方法的一个应用实例,在该例中,棘轮扳手选用的是2xlct-50,螺栓型号为m30,设定的液压泵输出的螺栓预紧目标油压p2为18mpa,设置cpu采样频率是6ms,扳手空载驱动油压p1为5mpa,开始启动液压泵,实时油压曲线如图4所示,对于整个紧固过程基于svm模型的油压状态标签识别如图上方所示,第1,2两个加压周期油压在达到5mpa前油压状态标签均为-1;第3次加压周期螺栓开始紧固检测到油压状态标签为1而后变为-1(未达到预设18mpa)开启下一个加压周期;同样完成第4次加压周期,在第5次加压周期中检测到油压状态先为-1再为1且保持到18mpa,算法成功判停。为了更好的验证svm模型抽取a~b,c~d,e~f,g~h,i~j,k~l,m~n,o~p八段数据样本(均10个数据点)进行预测,得到如图6所示分类结果,准确率为100%,模型可靠。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。