一种基于petri网的柔性制造系统禁止状态控制器设计方法
技术领域
1.本发明涉及柔性制造系统技术领域,具体地说是一种基于petri网的柔性制造系统禁止状态控制器设计方法。
背景技术:
2.柔性制造系统发展日趋复杂,由于技术条件或成本过高问题,使得其中存在某些自动加工过程不可被外部系统观测或不可被控制的过程,使得系统容易到达不被允许的运行状态。对于实际系统而言,由于现有的观测技术水平有限,事件观测成本过高及传感器、线路故障等原因,不可观事件以及不可控事件的存在不可避免。为保证柔性制造系统正常安全运行亦或是考虑系统经济效益问题,研究同时存在不可观测和不可控制加工过程的柔性制造系统的禁止状态控制问题,显得十分必要。但是目前存在的控制策略,涉及到的约束方法应用范围较窄,且需要对系统进行可达分析,导致计算复杂度较高、计算量偏大,不适用于结构复杂的柔性制造系统。
技术实现要素:
3.本发明的目的是提供一种基于petri网的柔性制造系统禁止状态控制器设计方法,以解决现有柔性制造系统中同时含有不可观测和不可控制加工过程中的禁止状态问题,提高控制策略的实用性。
4.本发明是这样实现的:一种基于petri网的柔性制造系统禁止状态控制器设计方法,包括以下步骤:
5.a、根据柔性制造系统流程以及给定的生产规范,构建相应的petri网模型(n,m0)和线性约束条件(w,k),其中,n=(p,t,f,k),p代表库所p的集合,t代表变迁t的集合,是流关系,m0表示实际系统的初始资源分配,k为有向弧的权值函数,w是库所权值向量,k是非负整数;
6.b、根据步骤a中petri网的结构特征和线性约束条件得到整数线性规划问题,本步骤具体如下:
7.b-1、将petri网模型(n,m0)中所有库所的权值之和的最小值作为目标函数,即|p|代表集合p中库所个数,w(pi)代表库所pi的权值,pi∈p;
8.b-2、令转换后每个变迁t的权值为α(t),t
*
表示变迁t的后置集,
*
t表示变迁t的前置集;t
*
={y∈p∪t|(t,y)∈f},
*
t={y∈p∪t|(y,t)∈f};
9.b-3、构建约束条件:
①
对于所有库所p∈p,均有w
*
(p)≥w(p),w
*
(p)代表约束转换后库所p的权值;
②
对于任意不可控变迁,均有约束转换后变迁t的权值α
*
(t)≤0;
③
对于任意不可观变迁,均有约束转换后变迁t的权值α
*
(t)=0;
10.c、求解上述线性规划问题,得到约束转换后的线性约束条件为(w
*
,k),w
*
为约束转换后库所权值;
11.d、在原petri网模型中添加控制库所pc,本步骤具体如下:
12.d-1、根据转换后的约束条件(w
*
,k),求出转换后每一变迁t的权值α
*
(t);
13.d-2、对于任意变迁t,若转换后变迁的权值α
*
(t)>0,则画一条由控制库所pc指向变迁t的弧,并为其赋值为|α
*
(t)|;若转换后变迁的权值α
*
(t)<0,则画一条由变迁t指向控制库所pc的弧,并为其赋值为|α
*
(t)|;
14.d-3、将添加控制库所pc以及弧后,同原petri网模型一起构成新的petri网模型记为为均有控制库所pc中的初始标识
15.当变迁所对应的事件能够被执行机构控制时,则称其为可控变迁,否则为不可控变迁;当变迁对应事件的发生能被传感器观测到时,则称此变迁为可观变迁,否则为不可观变迁;线性约束是基于资源有限提出的,其表示petri网内各个库所中的资源加权和不超过某一个正整数。
16.针对柔性制造系统中同时含不可观测及不可控制加工过程中的禁止状态问题,本发明提出了一种基于整数线性规划的控制器综合方法。与现有技术相比,本发明的优势主要体现在以下几个方面:
17.1.本发明提出的方法应用范围更广,能够有效处理同时含不可观测及不可控制加工过程的禁止状态问题。
18.2.本发明不需要进行可达性分析,因此避免了“状态爆炸”问题。
19.3.本发明利用整数线性规划方法实现问题高效求解。
20.4.能够通过标准的综合技术计算闭环系统模型。
附图说明
21.图1为某零件加工设备的petri网模型。
22.图2为含控制库所p
c1
和p
c2
的闭环petri网
23.图3为添加控制器前的模型可达标识仿真结果。
24.图4为添加控制器后的模型可达标识仿真结果。
具体实施方式
25.为进一步解释本发明的目的、技术方案以及优点,下面结合实例进行说明。下文描述的具体实施例仅用来解释本发明,并不用于限定本发明。
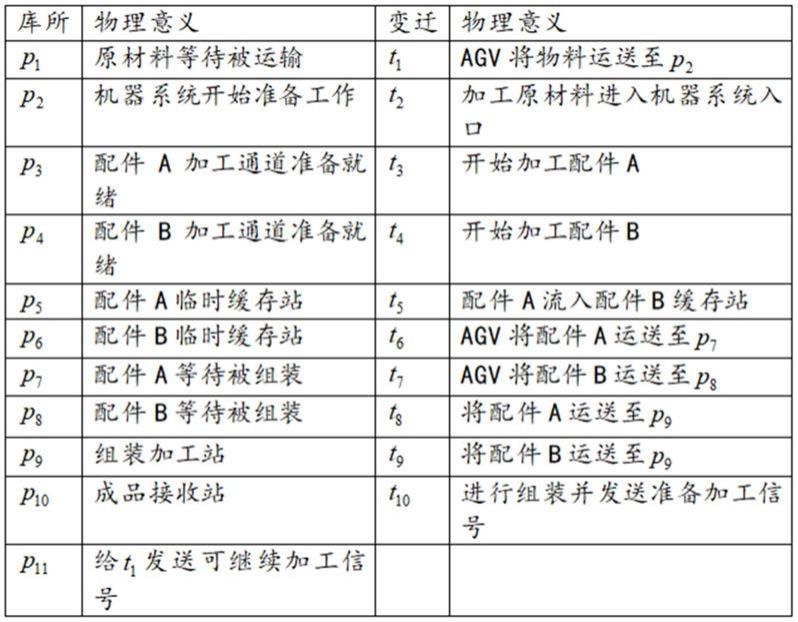
26.本实施例以同时加工配件a和配件b的柔性制造系统为例,用以解决系统该如何运行,使生产线上配件a与配件b可以不受干扰的完成加工,以及完成加工后能够进行新一轮加工的问题。本系统中用库所p代表资源或者工序的环节(在图1中用“·”或数字表示),用变迁t表示某一工序开始或结束的事件(在图1中用矩形表示)。当执行机构能够控制变迁所对应事件时,则称其为可控变迁,否则为不可控变迁(在图1中用灰色填充的矩形表示);当变迁对应事件的发生能被传感器观测到时,则称此变迁为可观变迁,否则为不可观变迁(在图1中用黑色填充的矩形表示)。本系统中库所及变迁的物理意义如表1所示。
27.表1
[0028][0029]
本系统中因原材料进入机器加工系统所消耗时间不受控制器控制,所以t2为不可控变迁;加工过程中,由于系统内部构造原因配件a的临时缓存零件可能会流入配件b的临时缓存中,所以t5视为故障处理即不可观变迁。在同时存在不可观和不可控变迁的柔性制造系统中,为了使得系统始终在平稳有序的运行,本发明对系统施加了以下控制策略:
[0030]
a、根据柔性制造系统流程以及给定的生产规范,构建相应的petri网模型(n,m0)和线性约束条件(w,k),其中,n=(p,t,f,k),p代表库所p的集合,t代表变迁t的集合,是流关系,m0表示实际系统的初始资源分配,k为有向弧的权值函数,w是库所权值向量,k是非负整数;
[0031]
如图1所示,其中m0=(2,0,0,0,0,0,0,0,0,0,1)
t
,图中库所及变迁的物理意义如表1所示,根据其实际生产规范可知,由于不可观变迁t5为系统故障,为了避免故障发生,库所p6和p8中最多有一个资源,即系统应满足线性约束(w1,k1),其中w1=(0,0,0,0,0,1,0,1,0,0,0),k1=1,即m(p6) m(p8)≤1,其中m(p)代表库所p中的资源数;此外,整个系统运行是在加工完一批零件后才会进行下一批零件加工,因此库所p2和p5中最多有一个资源,即系统应满足线性约束(w2,k2),其中w2=(0,1,0,0,1,0,0,0,0,0,0),k2=1,即m(p2) m(p5)≤1。
[0032]
b、根据步骤a中petri网的结构特征和线性约束条件得到整数线性规划问题,本步骤具体如下:
[0033]
b-1、将petri网模型(n,m0)中所有库所的权值之和的最小值作为目标函数,即w(pi)代表库所pi的权值,pi∈p。
[0034]
b-2、令转换后每个变迁t的权值为α(t),t
*
表示变迁t的后置集,
*
t表示变迁t的前置集;t
*
={y∈p∪t|(t,y)∈f},
*
t={y∈p∪t|(y,t)∈
f};
[0035]
b-3、构建约束条件:约束条件1
[0036]
约束条件2
[0037]
c、求解上述线性规划问题,得到约束条件下的最优解其中,k1=1;
[0038]
d、在原petri网模型中添加控制库所pc,本步骤具体如下:
[0039]
d-1、计算变迁t3、t4的权值分别画两条由控制库所p
c1
指向变迁t3、t4的弧,并分别赋值为1,1;
[0040]
d-2、计算变迁t6、t9的权值分别画两条由控制库所p
c1
指向变迁t6、t9的弧,并分别赋值为1,1;
[0041]
d-3、将添加控制库所pc以及弧后,同原petri网模型一起构成新的petri网模型记为为均有控制库所p
c1
中的初始标识
[0042]
同理,根据步骤b和步骤c得到另一组约束条件下的最优解其中其中k2=1。根据步骤d设计控制库所p
c2
,控制库所结构如图2所示。
[0043]
实例结果分析。为检验本发明的有效性,用matlab进行仿真验证。施加控制库所前后的结果分别如图3、4所示。图中横线表示k的值,横线以下点表示加权和w
·
m≤k,即m为允许标识;横线以上的点表示加权和w
·
m>k,即m为禁止标识。根据图3可知,图1所示模型中存在不满足给定线性约束的禁止标识(即横线以上的点)。图4为加入控制库所p
c1
、p
c2
后的仿真结果。可以看出,在控制库所p
c1
、p
c2
的作用下,被控系统所有可达标识均满足w
·
m≤1,达到了控制目标。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。