技术特征:
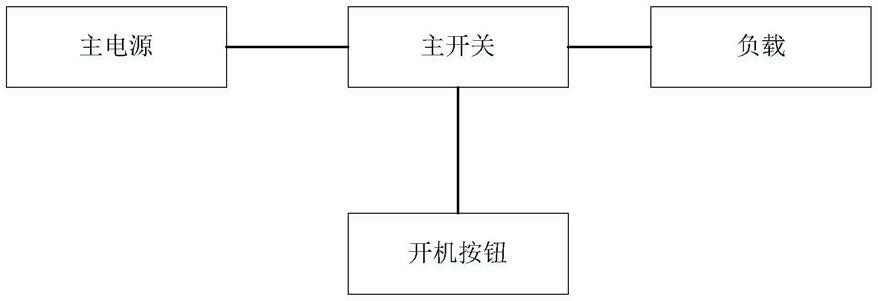
1.一种重启控制装置,其特征在于,应用于电源模块,所述电源模块还包括主电源、手动开关模块及驱动开关模块;所述主电源用于通过所述驱动开关模块为机器人中的各个用电模块供电;所述重启控制装置包括通信处理模块、第一可控开关模块、反馈模块及控制模块;所述手动开关模块与所述反馈模块串联且串联后的电路的一端与第一电源连接,所述串联后的电路的另一端分别与所述第一可控开关模块的第一端、所述控制模块及所述驱动开关模块的控制端连接,所述反馈模块还与所述控制模块连接;所述第一可控开关模块的控制端与所述通信处理模块连接,所述第一可控开关模块的第二端接地,用于在接收到用户通过所述通信处理模块发送的表征机器人待重启的第一信号时导通以使所述驱动开关模块关断;在未接收到所述第一信号时关断以使所述驱动开关模块导通;所述反馈模块用于在所述第一可控开关模块导通时向所述控制模块发送表征所述机器人待重启的第二信号;所述控制模块用于在接收到所述第二信号时控制所述驱动开关模块关断预设时长后导通。2.如权利要求1所述的重启控制装置,其特征在于,所述通信处理模块包括构成所述机器人中的通信模块、导航工控模块及运动控制模块的模块;所述通信模块、所述导航工控模块及所述运动控制模块依次连接;所述通信模块用于接收所述用户发送的表征所述机器人待重启的第三信号;所述导航工控模块用于对所述第三信号进行信号转换后通过所述运动控制模块向所述第一可控开关模块的控制端发送所述第一信号,其中,所述运动控制模块用于传递所述第一信号。3.如权利要求1所述的重启控制装置,其特征在于,所述驱动开关模块包括第一mosfet、第一电阻及第二可控开关模块;所述第一mosfet的栅极与所述第一电阻的一端连接且连接的公共端作为所述驱动开关模块的控制端,所述第一mosfet的源极与所述第一电阻的另一端连接且连接的公共端接地,所述第一mosfet的漏极与所述第二可控开关模块的控制端连接;所述第二可控开关模块的第一端与所述主电源连接,所述第二可控开关模块的第二端与各个所述用电模块连接;在接收到所述第二信号时控制所述驱动开关模块关断预设时长后导通,包括:在接收到所述第二信号时控制所述第一mosfet关断预设时长以控制所述第二可控开关模块关断,在达到所述预设时长后控制所述第一mosfet导通以控制所述第二可控开关模块导通。4.如权利要求3所述的重启控制装置,其特征在于,所述手动开关模块包括手动开机按钮及第一限流电阻;所述反馈模块包括上拉电阻及光耦;所述光耦的发光二极管的阳极作为所述串联后的电路的一端,所述发光二极管的阴极与所述手动开机按钮的第一端连接,所述手动开机按钮的第二端与所述第一限流电阻的一端连接,所述第一限流电阻的另一端作为所述串联后的电路的另一端,其中,所述手动开机按钮为常开按钮;
所述光耦的光敏三极管的集电极与所述上拉电阻的一端连接且连接的公共端与所述控制模块连接,所述光敏三极管的发射极接地;所述上拉电阻的另一端与第二电源连接;所述发光二极管用于在所述第一可控开关模块导通时导通,在所述第一可控开关模块关断时关断;所述光敏三极管用于在所述发光二极管导通时导通,在所述发光二极管关断时关断。5.如权利要求4所述的重启控制装置,其特征在于,所述反馈模块还包括二极管;所述二极管的阴极分别与所述第一电源及所述光敏二极管的阳极连接,所述二极管的阳极分别与所述光敏二极管的阴极及所述手动开机按钮的第一端连接,用于保护所述光耦。6.如权利要求4所述的重启控制装置,其特征在于,所述反馈模块还包括第二限流电阻及滤波电容;所述第二限流电阻的一端与所述控制模块连接,所述第二限流电阻的另一端分别与所述光敏三极管的集电极、所述滤波电容的一端及所述上拉电阻的一端连接,用于限流;所述滤波电容的另一端与所述光敏三极管的发射极连接且连接的公共端接地,用于滤波。7.如权利要求1所述的重启控制装置,其特征在于,所述控制模块包括mcu;所述mcu与第三电源连接,所述第三电源用于为所述mcu供电。8.如权利要求1至7任一项所述的重启控制装置,其特征在于,所述第一可控开关模块包括第二mosfet;所述第二mosfet的栅极作为所述第一可控开关模块的控制端,所述第二mosfet的漏极作为所述第一可控开关模块的第一端,所述第二mosfet的源极作为所述第一可控开关模块的第二端。9.如权利要求8所述的重启控制装置,其特征在于,所述第一可控开关模块还包括第三限流电阻;所述第三限流电阻的一端与所述第二mosfet的栅极连接,所述第三限流电阻的另一端与所述通信控制模块连接,用于限流。10.一种机器人,其特征在于,包括电源模块,所述电源模块包括主电源、手动开关模块及驱动开关模块,所述主电源用于通过所述驱动开关模块为机器人中的各个用电模块供电;所述电源模块还包括如权利要求1至9任一项所述的重启控制装置;所述驱动开关模块分别与所述主电源、所述手动开关模块及所述重启控制装置连接。
技术总结
本发明公开了一种重启控制装置及机器人,当用户通过通信处理模块控制第一可控开关模块导通时,则驱动开关模块关断,同时反馈模块向控制模块发送表征机器人待重启的第二信号,此时,主电源不能再为各个用电模块供电进而实现了机器人的整机掉电,且控制模块会在接收到该第二信号时保持控制驱动开关模块关断,直到达到预设时长后再控制驱动开关模块导通以恢复主电源对各个用电模块的供电,进而实现了整机的重启。与现有技术相比,该方案无需采取手动重启的方式,也无需去到机器人停滞的位置,而是在结合了原本的电源模块的硬件电路的基础上,实现了对机器人的远程可靠重启控制,控制方式更加便捷且对机器人需要重启时的响应迅速。迅速。迅速。
技术研发人员:张世界 胡少鹏
受保护的技术使用者:坎德拉(深圳)科技创新有限公司
技术研发日:2022.02.18
技术公布日:2022/5/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。