1.本发明属于谷物收获机自动控制设备技术领域,具体涉及一种谷物收获机自动防卡滞控制装置及控制方法。
背景技术:
2.近年来随着农业机械化现代化水平的不断提升,谷物收获机在农作物收获过程中应用越来越广泛。作为农业大国,我国的各类谷种植面积广,种植地形复杂多样。收获机操作人员在进行谷物收割过程中,需时刻保持高度的注意力集中,对谷物种植地形及种植密度进行观察,并根据观察结果实时调整谷物收获机的行进速度,滚筒转速等工作状态,防止谷物瞬时喂入量过大,造成滚筒卡滞的情况发生。该种操控方式即增加了操作人员的劳动强度,又对操作人员的操控技能提出较高要求。现有技术中公开一种联合收割机脱粒滚筒堵塞故障预警及报警方法,由于只对收割机的输出动力轴和脱粒滚筒进行转速采集,导致需要采用较为复杂的算法模型完成对正常收割、收割时加速、收割时减速等情况下故障情况进行预判,同时由于算法复杂,对处理器等硬件资源提出了较高要求,造成系统成本大幅提升,否则系统实时性无法满足实际应用需求。由于农业机械对设备成本的敏感性,因此市场迫切需求一款低成本谷物收获机自动防卡滞装置。
技术实现要素:
3.本发明的目的是为了解决上述现有技术上存在的问题,提供一种谷物收获机自动防卡滞控制装置及控制方法,本装置和控制方法应用于谷物收获机上,能够有效解决谷物收获机作业过程中滚筒卡滞堵塞问题的发生。
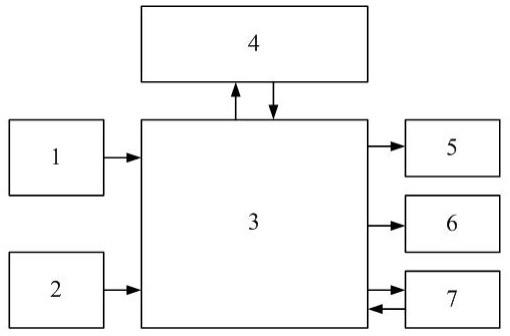
4.本发明的目的之一通过以下方案实现:一种谷物收获机作业防卡滞控制装置,包括车速传感器、滚筒转速传感器、中央控制器、智能显控屏、报警喇叭、电磁开关阀和整车can总线模块,所述车速传感器、滚筒转速传感器的信号输出端分别与中央控制器连接,所述中央控制器分别与智能显控屏、整车can总线模块双向信号连接,中央控制器的信号输出端与报警喇叭、电磁开关阀连接。
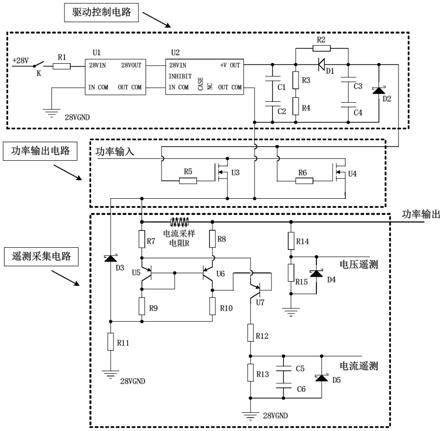
5.作为优选方案,所述中央控制器包括dc/dc电压转换电路、ldo电压转换电路、传感器数据采集电路、微处理器、报警喇叭驱动电路、电磁开关阀驱动电路以及can总线驱动电路;其中dc/dc电压转换电路与ldo电压转换电路单向连接,所述ldo电压转换电路分别与传感器数据采集电路、微处理器、报警喇叭驱动电路、电磁开关阀驱动电路以及can总线驱动电路单向连接,所述传感器数据采集电路与微处理器单向连接,所述微处理器分别与报警喇叭驱动电路、电磁开关阀驱动电路单向连接,所述微处理器与can总线驱动电路双向互相连接。
6.作为优选方案,所述dc/dc电压转换电路将来自谷物收获机车载电瓶的 24v/ 12v电源转换为 5v电源,供传感器数据采集电路、报警喇叭驱动电路、电磁开关阀驱动电路以及can总线驱动电路使用。
7.作为优选方案,所述微处理器,经过 5v/ 3.3v高速信号转换电路实现传感器数据采集电路、报警喇叭驱动电路、电磁开关阀驱动电路以及can总线驱动电路的信号交互。
8.作为优选方案,所述智能显控屏的操作界面包括:车速显示框、滚筒转速显示框、滚筒转速调节滑动块、卡滞前预报警显示框、轻微卡滞报警显示框、严重卡滞报警显示框、启动按钮、参数设置按钮以及停止按钮。
9.本发明的目的之二是通过如下方案实现,一种谷物收获机作业防卡滞控制装置的控制方法,具体包括如下步骤:步骤一、系统上电后,操作人员通过智能显控屏的滚筒转速调节滑动块设定滚筒目标转速,之后点击启动按钮启动谷物收获机自动防卡滞控制装置;步骤二、谷物收获机作业过程中,操作人员可根据实际情况通过智能显控屏的滚筒转速调节滑动块重新设定滚筒目标转速值,之后点击参数设置按钮即可将最新的滚筒目标转速值下发给中央控制器;步骤三、谷物收获机作业过程中,中央控制器通过微处理器将每次采集到的滚筒实时转速值与滚筒目标转速值进行比较,并设定标志变量统计滚筒实时转速值低于滚筒目标转速值8%及以上的次数;步骤四、当确定当前滚筒转速值低于滚筒目标转速值8%及以上,中央控制器根据当前滚筒转速值低于滚筒目标转速值的范围,采用不同的策略进行处理。
10.作为优选方案,所述步骤一包括:中央控制器通过微处理器实时接收智能显控屏发来的数据帧,当监测到智能显控屏的启动按钮启动后,首先,将智能显控屏的滚筒转速调节滑动块设定的目标转速值存储到微处理器内部的固定存储单元;其次,中央控制器根据智能显控屏的滚筒转速调节滑动块设定的目标转速值,通过电磁开关阀驱动电路驱动电磁阀经液压油缸改变滚筒传动比,从而控制滚筒按目标转速转动;最后,通过传感器数据采集电路实时采集车速传感器以及滚筒转速传感器的信号值,获取收获机实时车速及滚筒实时转速值,并发送至智能显控屏的车速显示框及滚筒转速显示框进行显示。
11.作为优选方案,所述步骤二包括:中央控制器的微处理器监测到智能显控屏的参数设置按钮被点击后,首先将微处理器的固定存储单元内之前所存储的滚筒目标转速值清除,随后将最新的滚筒目标转速值存储到该固定存储单元内,并通过电磁开关阀驱动电路驱动电磁阀控制滚筒按最新目标转速转动。
12.作为优选方案,所述步骤三包括:中央控制器通过微处理器将每次采集到的滚筒实时转速值与滚筒目标转速值进行比较,并设定标志变量统计滚筒实时转速值低于滚筒目标转速值8%及以上的次数。
13.作为优选方案,当确定当前滚筒转速值低于滚筒目标转速值8%及以上,中央控制器按照以下策略处理:当前滚筒转速值低于滚筒目标转速值在8%-10%范围时,则通过报警喇叭驱动电路驱动报警喇叭发出警报声,同时驱动智能显控屏的卡滞前预报警显示框以红绿交替闪烁的方式向操作人员发出报警提示;当前滚筒转速值低于滚筒目标转速值在10%-15%范围时,则通过报警喇叭驱动电路驱动报警喇叭发出警报声,同时驱动智能显控屏的轻微卡滞报警显示框以红绿交替闪烁的方式向操作人员发出报警提示,随后中央控制器通过can总线驱动电路向整车控制器发出降低车速的指令,以降低谷物收获机运行速度;当前滚筒转速值低于滚筒目标转速值在15%以上范围时,则通过报警喇叭驱动电路驱动报警喇叭
发出警报声,同时驱动智能显控屏的严重卡滞报警显示框以红绿交替闪烁的方式向操作人员发出报警提示,随后中央控制器通过can总线驱动电路向整车控制器发出停止运行的指令,以控制谷物收获机停车。
14.与现有技术相比,本发明至少具有如下有益效果:其一、上述谷物收获机自动防卡滞控制装置,可实现对谷物收获机作业过程中滚筒卡滞现象实时精确报警,防止因卡滞而导致的机械结构损坏等问题发生,具备自动防卡滞功能的谷物收获机可使得操作人员在谷物收割过程中不再为滚筒卡滞的问题耗费精力,最大限度降低了谷物收割过程中操作人员的劳动强度和技能要求,满足了谷物收获机厂家及用户的迫切需求。具体结合结构分析如下:本方案设置有车速传感器和滚筒转速传感器,通过传感器数据采集电路实时采集车速传感器以及滚筒转速传感器的信号值,获取收获机实时车速及滚筒实时转速值提供给中央处理器,中央控制器根据获取到的车速值、滚筒转速值、滚筒转速设定值等多方面信息进行决策运算,根据运算结果驱动报警喇叭、电磁开关阀进行动作,并通过整车can总线向整车相关控制器发送相应的can信息。中央控制器采用多个电路模块配合工作,对于报警喇叭、电磁开关阀等感性执行器件,中央控制器中的报警喇叭驱动电路、电磁开关阀驱动电路,采用高速续流二极管反向跨接在各感性执行器件两端,以消除感性器件工作过程中的楞次效应对中央控制器中电路其它器件造成损坏的隐患。智能显控屏提供给用户车速行进速度和滚筒转速等信息的直观显示,并根据当前滚筒转速值低于滚筒目标转速值的比较,对用户进行预警。
15.其二、本方案,优化了自动防卡滞控制装置的控制方法,通过与上述的防卡滞控制装置的配合,首先设定滚筒的目标转速值,然后将实时转速值与滚筒目标转速值进行比较,确定当前滚筒转速值低于滚筒目标转速值一定数值时,进行以下三种策略处理:卡滞前预报警、轻微卡滞报警以及严重卡滞报警,并通过智能显控屏向操作人员以图像化方式发出报警,以方便用户获取车辆卡滞情况的直观感受,能够及时作出操作判断。
附图说明
16.为了更清楚地说明发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
17.图1为本发明防卡滞控制装置的主体结构示意图;图2为中央控制器的结构示意图;图3为智能显控屏操作界面的结构示意图;图中标记:1、车速传感器,2、滚筒转速传感器,3、中央控制器,4、智能显控屏,5、报警喇叭,6、电磁开关阀,7、整车can总线模块,8、dc/dc电压转换电路,9、ldo电压转换电路,10、传感器数据采集电路,11、微处理器,12、报警喇叭驱动电路,13、电磁开关阀驱动电路,14、can总线驱动电路,15、车速显示框,16、滚筒转速显示框,17、滚筒转速调节滑动块,18、卡滞前预报警显示框,19、轻微卡滞报警显示框,20、严重卡滞报警显示框,21、启动按钮,22、参数设置按钮,23、停止按钮。
具体实施方式
18.以下通过示例性的实施方式对本发明进行具体描述。然而应当理解,在没有进一步叙述的情况下,一个实施方式中的元件、结构和特征也可以有益的结合到其它实施方式中。
19.如图1所示,本实施例提供一种谷物收获机作业防卡滞控制装置,包括车速传感器1、滚筒转速传感器2、中央控制器3、智能显控屏4、报警喇叭5、电磁开关阀6以及整车can总线7。其中车速传感器1、滚筒转速传感器2分别与中央控制器3单向连接;中央控制器3与智能显控屏4双向互相连接;中央控制器3与报警喇叭5、电磁开关阀6单向连接,与整车can总线模块7双向互相连接。
20.本方案中,车速传感器1、滚筒转速传感器2由中央控制器3提供 5v工作电压,并实时获取谷物收获机轮速信号和滚筒转速信号,经中央控制器3的传感器数据采集电路10滤波后传输至微处理器11进行运算处理;中央控制器3通过spi总线与智能显控屏4进行数据交互,一方面将车速值、滚筒转速值以及报警状态值实时上传至智能显控屏4进行显示,另一方面实时接收智能显控屏4发来的滚筒转速设定值、启动按钮21、参数设置按钮22以及停止按钮23的状态值用于后续运算处理;中央控制器3根据获取到的车速值、滚筒转速值、滚筒转速设定值等多方面信息进行决策运算,根据运算结果驱动报警喇叭5、电磁开关阀6进行动作并通过整车can总线7向整车相关控制器发送相应的can信息。
21.如图2所示,中央控制器3包括: dc/dc电压转换电路8、ldo电压转换电路9、传感器数据采集电路10、微处理器11、报警喇叭驱动电路12、电磁开关阀驱动电路13以及can总线驱动电路14;其中dc/dc电压转换电路8与ldo电压转换电路9单向连接,ldo电压转换电路9分别与传感器数据采集电路10、微处理器11、报警喇叭驱动电路12、电磁开关阀驱动电路13以及can总线驱动电路14单向连接,传感器数据采集电路10与微处理器11单向连接,微处理器11与报警喇叭驱动电路12、电磁开关阀驱动电路13单向连接,微处理器11与can总线驱动电路14双向互相连接。
22.本实施例,在中央控制器3中,应用dc/dc电压转换电路8将来自谷物收获机车载电瓶的 24v/ 12v电源转换为 5v电源供传感器数据采集电路10、报警喇叭驱动电路12、电磁开关阀驱动电路13以及can总线驱动电路14使用,同时所转换生成的 5v电源经ldo电压转换电路9进一步转换为 3.3v电源供微处理器11使用;微处理器11经过 5v/ 3.3v高速信号转换电路实现传感器数据采集电路10、报警喇叭驱动电路12、电磁开关阀驱动电路13以及can总线驱动电路14的信号交互;对于报警喇叭5、电磁开关阀6等感性执行器件,中央控制器3中的报警喇叭驱动电路12、电磁开关阀驱动电路13采用高速续流二极管反向跨接在各感性执行器件两端,以消除感性器件工作过程中的楞次效应对中央控制器3中电路其它器件造成损坏的隐患。
23.如图3所示,智能显控屏4操作界面包括:车速显示框15、滚筒转速显示框16、滚筒转速调节滑动块17、卡滞前预报警显示框18、轻微卡滞报警显示框19、严重卡滞报警显示框20、启动按钮21、参数设置按钮22以及停止按钮23。
24.本实施例,智能显控屏4操作界面中:车速显示框15用于显示谷物收获机实时行进速度;滚筒转速显示框16用于显示谷物收获机滚筒实时转速;滚筒转速调节滑动块17用于操作人员设定谷物收获机滚筒目标转速;卡滞前预报警显示框18、轻微卡滞报警显示框19
以及严重卡滞报警显示框20用于向操作人员以图像化方式发出报警;启动按钮21用于启动谷物收获机自动防卡滞控制装置工作;参数设置按钮22用于向中央控制器3提示谷物收获机滚筒目标转速设定完成状态;停止按钮23用于停止谷物收获机自动防卡滞控制装置工作。
25.本方案还提供一种谷物收获机自动防卡滞控制装置的控制方法,具体步骤如下:步骤一、系统上电后,操作人员通过智能显控屏4的滚筒转速调节滑动块17设定滚筒目标转速,之后点击启动按钮21启动谷物收获机自动防卡滞控制装置。中央控制器3通过微处理器11实时接收智能显控屏4发来的数据帧,当监测到智能显控屏4的启动按钮21启动后,首先将智能显控屏4的滚筒转速调节滑动块17设定的目标转速值存储到微处理器11内部固定存储单元;同时中央控制器3根据智能显控屏4的滚筒转速调节滑动块17设定的目标转速值,并通过电磁开关阀6驱动电路驱动电磁阀经液压油缸改变滚筒传动比,控制滚筒按目标转速转动;最后通过传感器数据采集电路10实时采集车速传感器1以及滚筒转速传感器2的信号值,获取收获机实时车速及滚筒实时转速值并发送至智能显控屏4的车速显示框15及滚筒转速显示框16进行显示。
26.步骤二、谷物收获机作业过程中,操作人员可根据实际情况通过智能显控屏4的滚筒转速调节滑动块17重新设定滚筒目标转速值,之后点击参数设置按钮22即可将最新的滚筒目标转速值下发给中央控制器3。中央控制器3的微处理器11监测到智能显控屏4的参数设置按钮22被点击后,首先将微处理器11内部固定存储单元内之前所存储的滚筒目标转速值清除,随后将最新的滚筒目标转速值存储到该固定存储单元内,并通过电磁开关阀6驱动电路驱动电磁阀控制滚筒按最新目标转速转动。
27.步骤三、谷物收获机作业过程中,中央控制器3通过微处理器11将每次采集到的滚筒实时转速值与滚筒目标转速值进行比较,并设定标志变量统计滚筒实时转速值低于滚筒目标转速值8%及以上的次数:每连续发生1次,该标志变量加1,如果连续5次采集到的滚筒实时转速值均低于滚筒目标转速值8%及以上,即标志变量值等于5,则认为当前滚筒转速值低于滚筒目标转速值8%及以上;如果连续次数不超过5次,则不认为当前滚筒转速值低于滚筒目标转速值8%及以上,并对标志变量进行清零操作,并重新计数,本步骤能够避免因为滚筒实时转速值瞬时的变化导致卡滞情况,防止造成中央控制器3对系统频繁的调节,同时其对所得到滚筒实时转速值与滚筒目标转速值进行比较的多个值,进行综合判断所得出的滚筒卡滞情况,对系统进行再调节会更加可靠,使得谷物收获机运行会更稳定。
28.步骤四、当确定当前滚筒转速值低于滚筒目标转速值8%及以上范围时,则中央控制器3按照以下策略处理:当前滚筒转速值低于滚筒目标转速值8-10%范围时,则通过报警喇叭5驱动电路驱动报警喇叭5发出警报声,同时驱动智能显控屏4的卡滞前预报警显示框18以红绿交替闪烁的方式向操作人员发出报警提示;当前滚筒转速值低于滚筒目标转速值10-15%范围时,则通过报警喇叭5驱动电路驱动报警喇叭5发出警报声,同时驱动智能显控屏4的轻微卡滞报警显示框19以红绿交替闪烁的方式向操作人员发出报警提示,随后中央控制器3通过can总线驱动电路14向整车控制器发出降低车速的指令,以降低谷物收获机运行速度,在降低谷物收获机运行速度的同时实时监测当前滚筒转速值与滚筒目标转速值的比值,如果比值降至10%范围以下,则停止向整车控制器发出降低车速的指令,同样可以保证谷物收获机的运行稳定连续性;当前滚筒转速值低于滚筒目标转速值15%以上范围时,则
通过报警喇叭5驱动电路驱动报警喇叭5发出警报声,同时驱动智能显控屏4的严重卡滞报警显示框20以红绿交替闪烁的方式向操作人员发出报警提示,随后中央控制器3通过can总线驱动电路14向整车控制器发出停止运行的指令,以控制谷物收获机停车。本步骤中,当前滚筒转速值低于滚筒目标转速值,均指的是滚筒目标转速值减去当前滚筒转速值之差除以滚筒目标转速值为滚筒转速比值,将该比值分别与8%,10%,15%节点值做比较,从而判断卡滞情况。
29.以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容作出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。