1.本发明涉及电池铸焊设备技术领域,具体为一种龙门架式电池铸焊系统。
背景技术:
2.在铅酸电池的加工过程中,首先加工成电极板,从电极板的组装到最后 装入电池盒进行铸焊前的过程中,都是以按容量配制串一起的极板组(即极群)为单位进行加工处理的,极群为若干组正、负极板及正、负极板之间的隔板组成,每个极板都带有极耳,每个极群中,所有正极极板的极耳位于极群顶面的一侧排成正极极耳排,所有负极极板的极耳位于极群顶面的另一侧排成负极极耳排,同极极耳间通过铸焊串联,每个极群在铸焊前需要对正极极耳和/或负极极耳的边极耳向内折20~30
°
的斜度,然后再根据电池的需要对极耳进行切销并磨去极耳表面的氧化层,方便后续对极耳排进行汇流排铸焊;最后需将极群装入电池壳中再进行铸焊。现今大部分电池生产公司主要以传统手工铸焊工艺进行电池铸焊,小部分以旧式铸焊机进行生产。这样的生产方式存在着人手需求多、生产效率慢、工人与熔炉位置过于接近存在安全隐患并长时间处于高温作业状态,生产情况并不理想。针对该问题,电池铸焊设备技术领域中出现了各种能够实现自动化生产的电池铸焊生产线,不仅有效提升了加工生产的效率,还有效降低了在生产过程中可能发生安全事故的概率,确保了工作人员的安全。
3.例如申请号为cn201410317296.x的中国发明专利申请文件中所公开的一种电池极群组装铸焊全自动生产设备,它包括极群夹具及依次连接的极耳整形装置、夹具翻转装置、极耳切削装置、极群下槽装置、极耳捏合装置以及极耳铸焊装置,减少了手工焊接过桥的程序,从而可以避免工人人工焊接过程受到 铅烟对人体的损害、降低环境污染。由于采用模具一次助焊成型,克服了人工 焊接所产生的质量的不稳定性,因此提高了产品质量;且模具也可以变得更薄, 模具成本也变得更加节省,可实现快速冷却和快速脱模。
4.但是该方案中所采用的极群夹具中的活动部分采用弹簧作为驱动部件实现对极群组的夹持固定,在后续加工处理的过程中极易出现因极群组中的极板瞬间受力过大发生晃动的情况,这就会导致极板之间的相对位置发生变化,限制了切刷、开槽或是焊接等加工过程中的精确程度。此外,弹簧部件在长时间的反复使用下,也会出现弹性力衰退的情况,无法完成对极群组稳定可靠的固定效果。
5.又如公开号为cn202010141090.1的中国发明专利文件中公开的一种全自动铸焊机以及自动铸焊流水线,其中所提及的自动铸焊流水线包括一种全自动铸焊机,还包括呈流水线上下游依次设置的入料平台、切刷机、装夹工位、翻转下料工位和输送线,所述全自动铸焊机的所述送料组件位于所述装夹工位和所述翻转下料工位之间,还包括用于装夹电池的多模抓手,所述多模抓手可动设置于所述装夹工位、翻转下料工位和送料组件之间。
6.在该方案中,需要通过自动化机械或人工将电池集群放置到切刷机上实现极耳的切修、刷助焊剂并放置在装夹工位上排列成为与周转板对应的阵列结构等待夹取,而操作人员位于设备所包围的中心区域,距离铸焊设备距离较近,不但无法与人员保持一定相对
的安全距离,且无法在发生紧急情况时进行及时逃离,存在一定的安全隐患。
7.针对上述问题,本发明提供了一种结构紧凑、节省空间,工作过程高效稳定,适用于电池高精度铸焊加工处理同时能够提升对周围工作人员安全防护效果的龙门架式电池铸焊系统。
技术实现要素:
8.本发明提供了一种结构紧凑、节省空间,工作过程高效稳定,适用于电池高精度铸焊加工处理同时能够提升对周围工作人员安全防护效果的龙门架式电池铸焊系统。
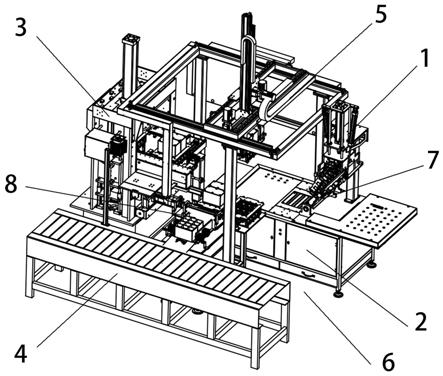
9.本发明的上述技术目的是通过以下技术方案得以实现的:一种龙门架式电池铸焊系统,包含有依次设置的用于对电池极群组中的极板进行夹持固定的极群组整定单元,用于对电池极群组中极板上的极耳部分进行切刷加工的切刷处理单元,用于对极群组中的极板进行铸焊处理的自动铸焊单元,以及用于将完成本系统中全部铸焊初加工工序的蓄电池产品向后继续进行输送的输送移动单元,上述各个单元整体呈一种半封闭的u字型结构进行排布,形成位于u字形结构内侧靠开口端位置的工作区,供辅助操作人员站立,所述自动铸焊单元位于相对所述工作区的远端位置;还包含有用于实现极群组在所述切刷处理单元、自动铸焊单元和输送移动单元之间进行移动的龙门架式转运单元。
10.作为对本发明的优选,所述极群组整定单元中包含有用于在移动时供外部机构进行夹持的底部承托板,所述底部承托板的底部面呈平面状,其中心位置开设有用于供极群组中各块极板底部面与下方基准平面相贴合实现定位的开口区;在所述底部承托板的上侧固定设置有能够在外部驱动装置作用下向极群组提供沿水平面上x轴向夹紧力的定位夹装组件,同时所述定位夹装组件中还包含有能够在撤去外部驱动装置作用时保持对极群组夹紧效果的自锁夹持机构。
11.作为对本发明的优选,所述定位夹装组件中还包含有沿水平面上x轴向分列于所述极群组两端的压紧隔板,所述压紧隔板之间呈互相平行的竖直状态排布,至少其中一块压紧隔板能够在外部驱动装置带动的自锁夹持机构的作用下沿x轴向进行移动并实现对极群组的夹紧作用效果。
12.作为对本发明的优选,所述切刷处理单元中主要包含有机体、电控机构、工作台板以及设于机体内的切刷机构,所述工作台板用于对极群组起到承载作用,工作台板上还开设有上还开设有上下贯通的避让槽口,供极群组中带有极耳的极板上部穿过所述工作台板并与所述切刷机构相接触从而完成切刷加工处理。
13.作为对本发明的优选,所述极群组整定单元与切刷处理单元之间设置有能够将夹持有极群组的定位夹装组件与底部承托板同时进行翻转倒置的第一翻转机构,使电池的极群组在完成翻转动作后极群组中带有极耳的极板上部进入所述避让槽口中。
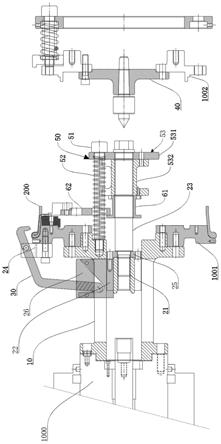
14.作为对本发明的优选,所述自动铸焊单元中包含有用于对仍然呈倒置状态与所述定位夹装组件固定在一起并且已完成对极耳部分切刷加工处理的极群组进行铸焊加工处理的铸焊机构,以及用于将完成铸焊加工处理过程的极群组与定位夹装组件进行分离同时将极群组转移至电池箱体内部的转移机构。
15.作为对本发明的优选,所述龙门架式转运单元中包含有固定安装于地面上的导轨
架以及活动安装于所述导轨架上用于对定位夹装组件进行移动的抓取组件,所述导轨架与抓取组件之间设置有能够实现所述抓取组件相对于导轨架在水平面内进行平移以及在竖直方向上进行升降活动的移动机构。
16.作为对本发明的优选,所述龙门架式转运单元以多组互不干涉的拖链组件作为驱动部件,在控制模块的控制下各组拖链组件协同实现对抓取组件的精确移动效果。
17.作为对本发明的优选,在所述自动铸焊单元和输送移动单元之间还设置有一种用于将完成铸焊初加工工序的电池产品与所述定位夹装组件进行分离并转运至所述输送移动单元中的第二翻转机构,所述第二翻转机构还能够通过对原本呈倒置状态电池产品的翻转作用使其重新回复至正向放置的状态。
18.作为对本发明的优选,述输送移动单元包含有作为驱动装置的电机以及在所述电机带动下持续进行回转运动的输送带。
19.综上所述,本发明能够实现以下多项有益效果:1.本发明所述的龙门架式电池铸焊系统中所包含的极群组整定单元、切刷处理单元、自动铸焊单元以及输送移动单元根据铸焊系统的加工顺序进行依次排布呈一种u字型结构,使得夹持有极群组的定位夹装组件进入铸焊系统位置和离开铸焊系统位置互相靠近缩短了距离,便于将内部所夹持极群组脱出后完成复位的定位夹装组件重新快速投入使用,使得维持铸焊系统正常运转工作所必需的定位夹装组件数量减少,有效地降低了加工成本和对工件的损耗,也提升了工作效率。
20.2.本发明所述的龙门架式电池铸焊系统中,由于各个工作单元排布呈u字型,而又将温度较高和可能产生毒害物质的自动铸焊单元设置于相对于供工作人员站立的工作区最远端位置,在保证原有的操作便捷性的前提下,不仅有效地将热源与人员进行分离,改善了工作环境的舒适性,也同时提升了工作人员进行操作时的安全性。
21.3.本发明所述的龙门架式电池铸焊系统中所包含的极群组整定单元,通过其中包含有自锁夹持机构的定位夹装组件,一旦在外部装置作用下完成压紧工作后,使各块极群组中的极板与定位夹装用具形成一个整体,不需要对定位夹装用具由外部装置提供持续的驱动作用力即可实现各部分之间的相对锁止固定,在定位夹装用具完成对由若干极板组成的极群组的夹装固定后进行各种后续加工处理的过程中始终能够保持夹持固定的可靠性以及极板相对位置的稳定性。
22.4.本发明所述的龙门架式电池铸焊系统在完成对极群组的夹持固定后,利用翻转机构使作为一个整体的固定有极群组的定位夹装组件呈倒置的状态进行后续的切刷、铸焊等工艺加工工序,使得极板上极耳部分由于切刷处理所散落的碎屑粉末都自然地向下掉落进入收容装置而不会附着于极板上,同样的,铸焊过程中的附着于极板上的铅液体也会迅速低落向下滴落进入铅液池中,降低了中间物质向外漏洒或转移至其它设备情况发生的可能性,避免了污染泄露的同时进一步提升了铸焊加工的效率以及电池产品的质量。
23.5.本发明所述的龙门架式电池铸焊系统整体结构布局紧密,相较于直线状布局的铸焊系统对于空间的利用率更高,在铸焊系统的上部所采用的龙门架式转运单元也可以选择整体尺寸结构更小、精确程度更高的类型,实现对夹持有极群组的定位夹装组件在各个加工单元之间进行移动更加高效和精准。
附图说明
24.图1为龙门架式电池铸焊系统的整体结构示意图;图2为龙门架式电池铸焊系统的俯视方向结构示意图;图3为龙门架式电池铸焊系统中极群组整定单元、切刷处理单元、自动铸焊单元以及输送移动单元之间位置结构关系示意图;图4为龙门架式电池铸焊系统中的极群组整定单元独立结构示意图;图5为极群组整定单元中的定位夹装组件结构放大示意图;图6为龙门架式电池铸焊系统中的第一翻转机构与切刷处理单元之间的位置结构关系;图7为龙门架式电池铸焊系统中的自动铸焊单元的正面结构示意图;图8为自动铸焊单元的背面结构示意图;图9为龙门架式电池铸焊系统中的龙门架式转运单元独立结构示意图;图10为龙门架式转运单元侧向结构示意图。
25.图中:1——极群组整定单元,101——底部承托板,102——定位夹装组件,102a——自锁夹持机构,102b——压紧隔板,103——外部驱动装置;2——切刷处理单元,201——工作台板,201a——避让槽口;3——自动铸焊单元,301——铸焊机构,302——转移机构;4——输送移动单元;5——龙门架式转运单元,501——导轨架,502——抓取组件,503——移动机构;6——工作区;7——第一翻转机构;8——第二翻转机构;9——电池箱体。
具体实施方式
26.以下具体实施例仅仅是对本发明的解释,其并不是对本发明的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本发明的权利要求范围内都受到专利法的保护。
27.本方案是通过以下技术手段实现的:实施例:在本实施例中,提供了一种龙门架式电池铸焊系统,该系统主要包含有依次设置的用于对电池极群组中的极板进行夹持固定的极群组整定单元1,用于对电池极群组中极板上的极耳部分进行切刷加工的切刷处理单元2,用于对极群组中的极板进行铸焊处理的自动铸焊单元3,以及用于将完成本系统中全部铸焊初加工工序的电池产品向后继续进行输送的输送移动单元4这几个加工处理单元部分。区别于常见的线形或是环形排布各个加工处理单元的电池铸焊系统,本方案中在俯视状态下,上述各个单元整体呈一种半封闭的u字型进行排布,在u字形结构的内侧靠开口端区域形成供辅助操作人员站立的工作区6,而其中的自动铸焊单元3正是布置于该u形结构弧形段位置区域即距离工作人员最远端的位置处。在上述各个加工单元的上部,设置有用于实现极群组在切刷处理单元2、自动
铸焊单元3和输送移动单元4之间进行高效精准移动的龙门架式转运单元5。
28.具体的,在u形结构的一端位置设置的是极群组整定单元1,该单元中包含有一块金属材质的底部承托板101,该底部承托板101开设有上下贯通的开口区,而该开口区能够将全部需要进行定位夹持的极板初步限位于内侧,避免极板在放置时超出夹持工作区域而导致的损坏情况发生;由于开口区的中心部分开口且下表面呈平整的平面状态,当将底部承托板101放置于上表面为光滑平整面的基台上同时将自身底部面经加工成平面状态的若干块极板放置于开口区内时,各块极板自然而然地通过与基台上表面之间的贴合抵靠实现以承托基台的上表面作为基准面在竖直方向上的定位。
29.极群组整定单元1中还包含有固定安装放置于底部承托板101上侧的一种定位夹装组件102,该定位夹装组件102的外侧连接形成有一种框架式结构,其内部包含有设置于两侧用于对极群组中的极板在y轴向的位置进行限制的侧向外挡板以及设置于两端用于对极群组中的极板在x轴向的位置进行限制同时进行夹持固定的定位夹装组件102。该定位夹装组件102中,包含有用于沿x轴向直接设置在极群组两端用于进行夹持抵靠的压紧隔板102b以及用于在向压紧隔板102b提供压紧作用力同时在后续加工状态中保证该压紧锁止状态的自锁夹持机构102a。具体的,该框架式结构中一部分为沿x轴线延伸并排布与两侧呈圆柱形的导向件,而位于两端的压紧隔板102b上的两侧均对称开设有与导向件的截面形状相同的贯通孔且两端的压紧隔板102b均同时套接于两导向件上,使两块压紧隔板102b呈互相平行的竖直状态连接于两侧的导向件之间且能够沿导向件的轴向进行滑动。在自锁夹持机构102a中,包含有在框架结构沿y轴方向的两端呈中心对称的方式安装设置的驱动件以及固定安装于驱动件上的支顶件。其中的驱动件的截面形状呈圆形,且整体通过弯折形成一种l形,使得驱动件整体被分隔为了转轴段和驱动段两部分;而其中的支顶件上开设有驱动件的转轴段部分穿过的贯通孔,并且两部件通过啮合、键槽或是焊接的方式固定在一起,使得驱动件在绕转轴段的中心轴线进行转动时,会带动支顶件一同转动。由于两端的驱动件也作为框架结构的一部分,与导向件相连接,因此无论两端的驱动件如何绕各自转轴段的中心轴线进行转动,两段中心轴线之间的距离都受到导向件长度的限制,而不会发生变化。支顶件整体呈一种近似于长方体的块状,其一侧用于与所述压紧隔板102b相接触的部分设置有弧面部,使所述支顶件在跟随所述驱动件共同绕固定的转动中心轴进行旋转的同时改变所述弧面部与所述压紧隔板102b表面接触点相对于转动中心轴之间的间距,即可通过改变该间距的大小使定位夹装组件102在夹紧或是放松两种状态之间进行切换,还可以通过改变转动角度调节支顶件施加于压紧隔板102b以及极群组上的夹持锁紧作用力大小。
30.更为具体的,在支顶件上所设置的用于与压紧隔板102b相抵靠接触的弧面部相对于转轴中心呈一种偏心的状态或是随着驱动件的转动距离逐渐增大,且弧面部表面与压紧隔板102b相抵靠处接触点之间的受力关系始终满足自锁条件,即压紧隔板102b在极群组所产生的反作用力下,通过接触点向支顶件所施加的作用力方向始终指向该位置点摩擦圆内部,实现一种自锁的效果,也就是说,只能由所述支顶件驱动所述压紧隔板102b移动而不能由所述压紧隔板102b驱动所述支顶件转动,避免了在完成夹持固定后由于极群组加工过程中的振动导致松动的情况发生。
31.由于在将极板安装于电池箱体9内部时,需要将相邻的间隔设置以保证电池的正常工作,因此在夹持所使用的定位夹装组件102中,也需要在相邻的极板之间设置辅助隔
板,用于将由外侧的压紧隔板102b和侧向外挡板所包围形成的内部空间分隔为互相独立的收容腔实现同时对极群中的不同极板进行收容夹持。具体的,与两端的压紧隔板102b相似的,辅助隔板也采用了在两侧开设贯通孔并套接于导向件上方式进行设置,使得辅助隔板也能够随着实际夹持过程的进行沿x轴向进行移动,以满足对于极群组中不同尺寸规格的极板进行夹持固定的需求。
32.在使用定位夹装组件102对极群组进行夹持固定时,还需要配合极群组整定单元1中的外部驱动装置103进行使用。该外部驱动装置103设置于定位夹装组件102上方能够进行升降的活动工作台上,通过对驱动段施加作用力使所述驱动件进行转动,完成对极群组的锁紧固定。该外部驱动装置103整体呈一种与定位夹装组件102中的驱动件相对应的中心对称方式进行设置,其中安装有一个整体大致沿竖直方向设置的伸缩驱动气缸,通过自身的工作向驱动件上的驱动段靠外侧段施加下压作用力,完成对极群组的夹紧固定。而在外部驱动装置103正下方的中心区域位置还安装有一种定位调节组件,主要包含有沿水平方向设置的另一组伸缩驱动气缸,并由这组驱动气缸带动沿x轴向延伸的定位件进行沿y轴向的平移运动。在使用过程中,定位调节组件会跟随外部驱动装置103先行下降,其中的伸缩驱动气缸会先于完成全部夹持固定进行工作通过向极板施加沿y轴向的抵靠作用力,先完成对进群组在y轴方向稳定固定,再外部驱动装置103带动自锁夹持机构102a工作,最终完成对极群组整体在xyz三轴线方向上的夹持固定效果。
33.在u形结构中,与极群组整定单元1的同侧设置的是切刷处理单元2。该切刷处理单元2的结构可参考授权公告号为cn102881868b的中国发明专利文件中所述的一种蓄电池极板的切耳、刷耳一体装置。相类似的,切刷处理单元2中主要包含有机体、电控机构、工作台板201以及设于机体内的切刷机构,所述工作台板201用于对极群组起到承载作用,工作台板201上还开设有上还开设有上下贯通的避让槽口201a,而该避让槽口201a的作用便是实现极群组以倒置的状态下被切刷机构进行加工处理。为了实现将夹持有极群组的定位夹装组件102进行翻转倒置,在极群组整定单元1和切刷处理单元2之间设置有第一翻转机构7。具体的,该第一翻转机构7中包含有能够与定位夹装组件102以及底部承托板101相固定的锁定机构,而第一翻转机构7由小型的电机或是气缸进行驱动的,使底部承托板101以及其上侧所安装的固定有极群组的定位夹装组件102能够绕一侧沿水平方向延伸的中心轴线进行翻转。在进行工作时,在第一翻转机构7的带动下使作为一个整体的固定有极群组的定位夹装组件102与底部承托板101向一侧翻转,同时极群组变换为倒置的状态且极群组中的中形成有极耳的上部嵌入前述的避让槽口201a中,再利用切刷处理单元2中的切刷机构对极耳部分进行加工处理,进而完成对极群组整体的切刷加工处理,此时锁定机构会解除第一翻转机构7与底部承托板101之间的锁止固定效果,并在驱动装置的作用下反向转动与底部承托板101和定位夹装组件102相分离并回复至原位置。
34.在完成切刷处理过程后,夹持有极群组的定位夹装组件102整体呈倒置状态,由操作人员将塑料材质的电池箱体9同样以开口朝下倒置的方式放置于定位夹装组件102此时位于上侧的底部面上。值得注意的是,定位夹装组件102此时已经在第一翻转机构7的作用下与基台的上表面相分离,即此时极群组与定位夹装组件102之间完全通过夹持所产生的摩擦作用实现在竖直方向上的固定。此时,利用龙门架式转运单元5将夹持有极群组的定位夹装组件102、底部承托板101以及其承托放置的电池箱体9作为一个整体移动至自动铸焊
单元3。
35.在上述实现夹持有极群组的定位夹装组件102进行移动时,利用了一种设置于各个单元上方的龙门架式转运单元5,该龙门架式转运单元5主要包含有固定安装于地面上的导轨架501,用于实现抓取作用的抓取组件502以及设置于两部分之间的移动机构503。在移动机构503中,主要以若干组分别沿xyz轴方向设置的拖链装置作为驱动部件,实现带动抓取组件502移动至水平面一定范围内的任一位置,同时调节竖直方向上的高度位置。
36.相对应的,自动铸焊单元3中主要包含有铸焊机构301以及转移机构302两部分。当夹持有极群组的定位夹装组件102以及其承托放置的电池箱体9作为一个整体被转移至自动铸焊单元3的入料口位置处时,由电机驱动的转移机构301会将其先向内平移再竖直向下移动,利用设置于底部的铸焊机构301对极群组进行加工处理。更为具体的该自动铸焊单元3的结构和铸焊工作方式可参考公开号为cn202010141090.1的中国发明专利文件中所公开的一种全自动铸焊机,在此不再进行赘述。完成铸焊处理后,转移机构301会将夹持有极群组的定位夹装组件102以及其承托放置的电池箱体9向上抬升,在将包含有若干个与极板相对应支顶块的支顶组件平移至电池定位夹装组件102的下方,利用上方的抵靠组件对电池箱体9的上表面保持抵靠效果的同时使夹持有极群组的定位夹装组件102以及其承托放置的电池箱体9同时向下移动,此时每一个支顶块会对应地向极群组中的极板施加由下向上的支顶力,时极板与夹持固定组件相分离并进入电池箱体9内部,完成电池极群组的入箱操作。随后,利用转移机构301将定位夹装组件102和其上部放置的初步完成铸焊加工处理的电池产品向外移动至出料口,由龙门架式转运单元5对该整体共同进行抓取并转运至输送移动单元4。而该输送移动单元4的主要部件为一种由电机驱动的且持续移动的输送带,以直线型布置于u形结构的另一侧面段,实现将完成铸焊处理的电池产品向其它加工区域运输。
37.值得注意的是,此时电池产品仍然呈一种内部极群组倒置的放置状态,为了对完成铸焊处理的极群组上部起到有效的保护作用,同时便于其它设备对电池产品进行进一步的加工处理,在自动铸焊单元3和输送移动单元4之间还设置有第二翻转机构8。在系统工作时,首先利用龙门架式移动单元将仍然呈翻转倒置状态的定位夹装组件102以及位于其上侧的电池产品进行抓取并移动至第二翻转机构8,利用第二翻转机构8对电池产品独立进行夹持翻转移动,使其内部极群组重新翻转回复至极耳朝上的正向放置状态。
38.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。