技术特征:
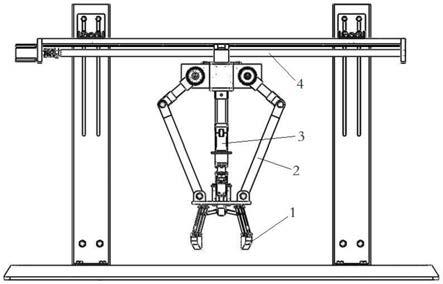
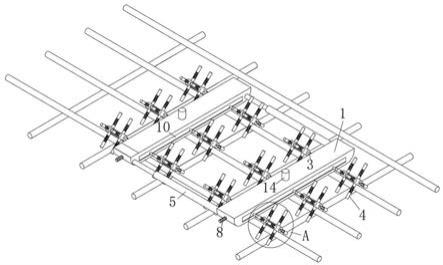
1.一种基于并联结构机器人的减速器装卸装置,其特征在于,包括滑动装置,所述滑动装置的滑动端上设有并联运动装置和螺栓拆卸装置,所述并联运动装置远离所述滑动装置的一端设有抓取装置。2.根据权利要求1所述的基于并联结构机器人的减速器装卸装置,其特征在于,所述滑动装置包括总固定架和滑块,所述总固定架上设有丝杆和滑杆,所述丝杆与所述总固定架转动连接,所述滑杆与所述总固定架固定连接,所述丝杆与所述滑杆相互平行,所述滑块上设有通孔和滑块螺纹孔,所述丝杆通过所述滑块螺纹孔与所述滑块螺纹连接,所述滑杆通过所述通孔与所述滑块滑动连接。3.根据权利要求2所述的基于并联结构机器人的减速器装卸装置,其特征在于,所述滑动装置还包括滑动步进电机,所述滑动步进电机与所述总固定架固定连接,所述滑动步进电机的输出端与所述丝杆固定连接。4.根据权利要求2所述的基于并联结构机器人的减速器装卸装置,其特征在于,所述并联运动装置包括定盘和动盘,所述定盘的两侧对称设有减速箱,每组所述减速箱的输入端设有并联步进电机,每组所述减速箱的输出端设有机械臂,所述机械臂远离所述减速箱的一端与所述动盘相连。5.根据权利要求4所述的基于并联结构机器人的减速器装卸装置,其特征在于,所述机械臂包括短轴和手肘,所述短轴通过电机转轴与所述减速箱相连,所述短轴远离所述减速箱的一端通过手肘转轴与所述手肘铰接,所述手肘远离所述短轴的一端与所述动盘转动连接。6.根据权利要求2所述的基于并联结构机器人的减速器装卸装置,其特征在于,所述螺栓拆卸装置包括拆卸装置固定架,所述拆卸装置固定架上对称设有两组行星减速器,每组所述行星减速器的输入端设有伺服电机,每组所述行星减速器的输出端设有联轴器,所述联轴器与所述行星减速器之间设有扭矩传感器,所述联轴器远离所述行星减速器的一端设有拧紧轴,所述拧紧轴上固定连接有拧紧轴套。7.根据权利要求6所述的基于并联结构机器人的减速器装卸装置,其特征在于,所述螺栓拆卸装置还包括气缸,所述气缸本体与所述滑块固定连接,所述气缸的活塞与所述拆卸装置固定架固定连接。8.根据权利要求4所述的基于并联结构机器人的减速器装卸装置,其特征在于,所述抓取装置包括四组机械爪,每组所述机械爪包括一个手爪,所述手爪的顶端靠近所述手爪工作面的一侧转动连接有第一长连杆,所述手爪的顶端的另一侧转动连接有第二长连杆,所述第一长连杆与所述第二长连杆相互平行设置,所述第一长连杆与所述第二长连杆远离所述手爪的一端与所述动盘转动连接。9.根据权利要求8所述的基于并联结构机器人的减速器装卸装置,其特征在于,所述抓取装置还包括短连杆和转盘,所述短连杆的一端与所述转盘转动连接,所述短连杆的另一端与所述第一长连杆靠近所述动盘的一端转动连接,所述转盘水平设置,且与所述动盘滑动连接,所述转盘的中心设有转盘螺纹孔,所述转盘螺纹孔内设有丝杠,所述丝杠与所述转盘螺纹连接,所述丝杠的顶端设有抓取步进电机,所述抓取步进电机的输出端与所述丝杠固定连接,所述抓取步进电机与所述动盘固定连接。
技术总结
本发明提供了一种基于并联结构机器人的减速器装卸装置,包括滑动装置,所述滑动装置的滑动端上设有并联运动装置和螺栓拆卸装置,所述并联运动装置远离所述滑动装置的一端设有抓取装置。本发明的技术方案提供一种基于并联机构的机器人减速器装卸装置,该装置可以克服人工装卸谐波减振器的不足,减少该谐波减速器装卸过程中使用的劳动力,并且提高装卸的效率和准确性,使其在一定程度上实现自动化。使其在一定程度上实现自动化。使其在一定程度上实现自动化。
技术研发人员:梁忠伟 余刁刁 刘晓初 张宇鹏 陈礼智 萧金瑞
受保护的技术使用者:广东省科学院中乌焊接研究所
技术研发日:2022.01.29
技术公布日:2022/5/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。