1.本实用新型涉及自动化焊接技术领域,特别涉及一种焊接残渣自收集的机器人弧焊房。
背景技术:
2.目前的焊房中大多设置有械臂机器人和焊接台,通过机械臂机器人上的焊接装置对焊接台上固定的工件进行焊接,通过焊房的隔离作用防止烟尘和毒气的扩散,但是在焊接过程中会产生一些焊接残渣,例如铁屑和大颗粒粉尘。
3.cn211387297u的一种焊接残渣自收集的机器人弧焊房,不便自动检测废料收集箱内焊接残渣的收集量并控制将收集的焊接残渣自动推出,人工难以及时将收集的焊接残渣排出,进而容易导致影响废料收集箱对焊接残渣的持续收集问题。
技术实现要素:
4.本实用新型针对以上问题,提出一种焊接残渣自收集的机器人弧焊房来解决上述问题。
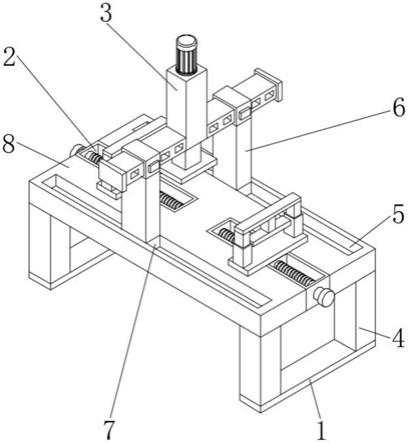
5.本实用新型是这样实现的,一种焊接残渣自收集的机器人弧焊房,包括焊接台、承载板、废料收集箱、压块装置以及气缸,所述气缸的下端面安装有竖直封闭板,所述承载板的上端面贯穿开设有多个排泄孔,所述承载板的下端面安装有导向内板,所述导向内板的下端面与废料收集箱的上端面连通,所述废料收集箱的内部底端设置有加压块,所述压块装置的输出端贯穿废料收集箱并与加压块的前端面可拆卸连接,所述废料收集箱的内部左右两侧分别安装有红外发射器以及红外接收器,所述废料收集箱的右侧安装有控制器,所述红外发射器、红外接收器、控制器、压块装置以及气缸之间均为电性连接。
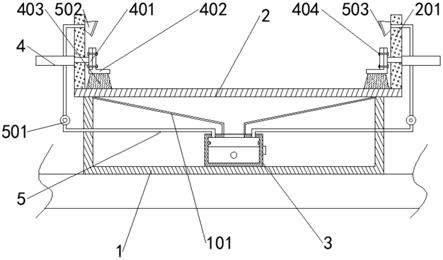
6.为了方便对残留到承载板上端的焊接残渣左右刷动快速向下掉落,避免残留到承载板上端的焊接残渣对排泄孔造成堵塞的问题,作为本实用新型的一种焊接残渣自收集的机器人弧焊房优选的,所述承载板的上端面左右两侧均固定连接有竖板,两个所述竖板相背的一端均贯穿连接有电动推杆,两个所述电动推杆相对的一端均安装有安装板,两个所述安装板相对的一端均安装有连接块,两个所述连接块的下端面均固定连接有毛刷,两个所述毛刷的下端面均与承载板的上端面紧密贴合。
7.为了焊接过程中方便对飞扬的粉尘收集至废料收集箱内,避免粉尘飞扬难以收集至废料收集箱内,作为本实用新型的一种焊接残渣自收集的机器人弧焊房优选的,所述废料收集箱的上端面左右两侧均连通有吸尘管,两个所述吸尘管的外侧壁均安装有风机,两个所述吸尘管的另一端分别贯穿两个竖板并延伸至竖板的内部,两个所述吸尘管的另一端均连通有进尘头。
8.为了粉尘通过两个进尘头进入到废料收集箱内时,方便对焊接残渣进行过滤,作为本实用新型的一种焊接残渣自收集的机器人弧焊房优选的,两个所述进尘头相对的一端均安装有过滤网。
9.为了方便更换毛刷,作为本实用新型的一种焊接残渣自收集的机器人弧焊房优选的,两个所述安装板与两个连接块之间分别通过多个螺栓可拆卸连接。
10.与现有技术相比,本实用新型的有益效果是:
11.该种焊接残渣自收集的机器人弧焊房,焊接过程中,当进入到废料收集箱内的焊接残渣过多时,焊接残渣将红外发射器发射的红外线造成阻挡,红外接收器难以接受到信号后将信息传递给控制器,控制器控制压块装置以及气缸开启,气缸带动竖直封闭板向上打开,压块装置带动加压块移动将废料收集箱内的焊接残渣推出,从而达到了方便自动检测废料收集箱内焊接残渣的收集量并控制将收集的焊接残渣自动推出的效果,解决了人工难以及时将收集的焊接残渣排出导致影响废料收集箱对焊接残渣的持续收集的问题。
附图说明
12.图1为本实用新型的一种焊接残渣自收集的机器人弧焊房剖面图;
13.图2为本实用新型的一种焊接残渣自收集的机器人弧焊房剖面图;
14.图3为本实用新型的废料收集箱剖面图;
15.图4为本实用新型的毛刷处结构图。
16.图中,1、焊接台;101、导向内板;2、承载板;201、竖板;3、废料收集箱;301、加压块;302、红外发射器;303、红外接收器;304、控制器;305、压块装置;306、气缸;307、竖直封闭板;4、电动推杆;401、安装板;402、连接块;403、毛刷;404、螺栓;5、吸尘管;501、风机;502、进尘头;503、过滤网。
具体实施方式
17.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
18.在本实用新型的描述中,需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
19.请参阅图1-4,一种焊接残渣自收集的机器人弧焊房,包括焊接台1、承载板2、废料收集箱3、压块装置305以及气缸306,气缸306的下端面安装有竖直封闭板307,承载板2的上端面贯穿开设有多个排泄孔,承载板2的下端面安装有导向内板101,导向内板101的下端面与废料收集箱3的上端面连通,废料收集箱3的内部底端设置有加压块301,压块装置305的输出端贯穿废料收集箱3并与加压块301的前端面可拆卸连接,废料收集箱3的内部左右两侧分别安装有红外发射器302以及红外接收器303,废料收集箱3的右侧安装有控制器304,红外发射器302、红外接收器303、控制器304、压块装置305以及气缸306之间均为电性连接。
20.本实施例中:焊接过程中,当进入到废料收集箱3内的焊接残渣过多时,焊接残渣将红外发射器302发射的红外线造成阻挡,红外接收器303难以接受到信号后将信息传递给
控制器304,控制器304控制压块装置305以及气缸306开启,气缸306带动竖直封闭板307向上打开,压块装置305带动加压块301移动将废料收集箱3内的焊接残渣推出,从而达到了方便自动检测废料收集箱3内焊接残渣的收集量并控制将收集的焊接残渣自动推出的效果,解决了人工难以及时将收集的焊接残渣排出导致影响废料收集箱3对焊接残渣的持续收集的问题。
21.作为本实用新型的一种技术优化方案,承载板2的上端面左右两侧均固定连接有竖板201,两个竖板201相背的一端均贯穿连接有电动推杆4,两个电动推杆4相对的一端均安装有安装板401,两个安装板401相对的一端均安装有连接块402,两个连接块402的下端面均固定连接有毛刷403,两个毛刷403的下端面均与承载板2的上端面紧密贴合。
22.本实施例中:一些焊接残渣容易残留到承载板2上端,难以从排泄孔内向下掉落,随着长时间堆积,容易对排泄孔造成堵塞,进而定时开启两个电动推杆4,两个电动推杆4带动毛刷403移动,将堆积到承载板2上端的焊接残渣推动从排泄孔向下掉落,从而达到了方便对残留到承载板2上端的焊接残渣左右刷动快速向下掉落的效果,避免残留到承载板2上端的焊接残渣对排泄孔造成堵塞的问题。
23.作为本实用新型的一种技术优化方案,废料收集箱3的上端面左右两侧均连通有吸尘管5,两个吸尘管5的外侧壁均安装有风机501,两个吸尘管5的另一端分别贯穿两个竖板201并延伸至竖板201的内部,两个吸尘管5的另一端均连通有进尘头502。
24.本实施例中:焊接时,通过开启两个风机501,焊接过程中产生的粉尘通过两个进尘头502进入到吸尘管5内,并输送到废料收集箱3内,从而达到了焊接过程中方便对飞扬的粉尘收集至废料收集箱3内的效果,避免粉尘飞扬难以收集至废料收集箱3内的效果。
25.作为本实用新型的一种技术优化方案,两个进尘头502相对的一端均安装有过滤网503。
26.本实施例中:粉尘通过两个进尘头502进入到废料收集箱3内时,通过过滤网503方便对焊接残渣进行过滤。
27.作为本实用新型的一种技术优化方案,两个安装板401与两个连接块402之间分别通过多个螺栓404可拆卸连接。
28.本实施例中:更换毛刷403时,通过拧动多个螺栓404,将连接块402从不安装板401上拆卸,更换下一毛刷403,从而达到了方便更换毛刷403的效果。
29.本实用新型的工作原理及使用流程:焊接过程中,焊接时,通过开启两个风机501,焊接过程中产生的粉尘通过两个进尘头502进入到吸尘管5内,并输送到废料收集箱3内,当进入到废料收集箱3内的焊接残渣过多时,焊接残渣将红外发射器302发射的红外线造成阻挡,红外接收器303难以接受到信号后将信息传递给控制器304,控制器304控制压块装置305以及气缸306开启,气缸306带动竖直封闭板307向上打开,压块装置305带动加压块301移动将废料收集箱3内的焊接残渣推出,一些焊接残渣容易残留到承载板2上端,难以从排泄孔内向下掉落,随着长时间堆积,容易对排泄孔造成堵塞,进而定时开启两个电动推杆4,两个电动推杆4带动毛刷403移动,将堆积到承载板2上端的焊接残渣推动从排泄孔向下掉落,更换毛刷403时,通过拧动多个螺栓404,将连接块402从不安装板401上拆卸,更换下一毛刷403。
30.以上仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用
新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。