1.本实用新型涉及智能化电弧焊技术领域,具体为一种智能化电弧焊机器人。
背景技术:
2.智能化是指事物在计算机网络、大数据、物联网和人工智能等技术的支持下,所具有的能满足人们的各种需求的属性,而智能化弧焊机器人则是指专业人员进行专业的编程使其用程序进行自动弧焊的工业机器人,弧焊机器人的组成和原理与点焊机器人基本相同,相较于人工点焊大幅度的提高了作业效率。
3.市场上的智能化电弧焊机器人在使用中,虽然具有一体智能化的程序式电弧焊,但是在电弧焊的过程中难免会产生焊渣,此时需要整套电弧焊的流程结束以后,由专业的人员进行清理,为此,我们提出一种智能化电弧焊机器人。
技术实现要素:
4.本实用新型的目的在于提供一种智能化电弧焊机器人,以解决上述背景技术中提出的虽然具有一体智能化的程序式电弧焊,但是在电弧焊的过程中难免会产生焊渣,此时需要整套电弧焊的流程结束以后,由专业的人员进行清理的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种智能化电弧焊机器人,包括主体、装配机构、可拆式清理机构和焊枪组件,所述主体的一侧端头设置有装配机构,且主体的另一端端头连接有可拆式清理机构,所述可拆式清理机构的一侧设置有焊枪组件,所述主体包括旋转母件、子转动件、连装基座、第一旋转轴、连接杆、第二旋转轴、贴装转头和伸缩组件,且旋转母件的端侧中端装配有子转动件,所述子转动件的侧边固定有连装基座,且连装基座的两侧中端设置有第一旋转轴,所述第一旋转轴的中部连接有连接杆,且连接杆的顶部一端设置有第二旋转轴,所述第二旋转轴的内侧固定有贴装转头,且贴装转头的底端中部装配有伸缩组件。
6.进一步的,所述贴装转头通过第二旋转轴与连接杆构成旋转结构,且连接杆、第一旋转轴与连装基座三者为旋转连接。
7.进一步的,所述装配机构包括装配基座、连装件、螺装槽和限位螺栓,且装配基座的侧边固定有连装件,所述装配基座中部两侧设置有螺装槽,且螺装槽的中部中端设置有限位螺栓。
8.进一步的,所述螺装槽与限位螺栓两者之间为螺纹连接,且螺装槽和限位螺栓沿着装配基座的横向中轴线对称分布。
9.进一步的,所述可拆式清理机构包括焊装架、装配空槽、小型风机、伸缩槽孔、装杆、连接侧板、螺纹槽口、对位螺纹组件和风口架,且焊装架的边侧设置有装配空槽,所述装配空槽的内部装配有小型风机,所述焊装架的上方一侧设置有伸缩槽孔,且伸缩槽孔的内部中端设置有装杆,所述装杆的边端设置有连接侧板,且装杆的上方设置有螺纹槽口,所述焊装架的顶端一侧设置有对位螺纹组件,且焊装架的底端一侧设置有风口架。
10.进一步的,所述连接侧板通过伸缩槽孔与装杆和焊装架构成伸缩可拆结构,且伸缩槽孔与装杆设置有两个。
11.进一步的,所述装杆通过螺纹槽口与对位螺纹组件和焊装架构成螺纹限位结构,且螺纹槽口与对位螺纹组件设置有两组。
12.与现有技术相比,本实用新型的有益效果是:该智能化电弧焊机器人,焊枪组件在进行电弧焊的过程中难免会产生焊渣,此时使用者可将小型风机开启,使其对准风口架对产生的焊渣进行对位清理,且使用者需要对小型风机进行拆装时,不需要拆下对位螺纹组件,利用伸缩槽孔与装杆将侧边的连接侧板抽出,拆下其内部装配的小型风机即可。
13.第一旋转轴与第二旋转轴两者利用自身的旋转性可以通过事先设计好的编程程序来对焊枪组件达到高角度多样化的可调节效果,当加工件需要电弧焊的点位较为偏杂时,其焊枪组件也可以有效达到电弧焊接的有益效果。
14.螺装槽与限位螺栓的螺纹组合方便使用者对主体进行限位固定,其拆装的效果可以提高主体的电弧焊接的角度,可贴墙式安装的同时也可坐地式的装配,适应性较强。
15.焊枪组件在进行电弧焊的过程中难免会产生焊渣,一般需要事后进行人工专业清理,会给使用者带来许多清理上的麻烦,此时使用者可将小型风机开启,使其对准风口架对产生的焊渣进行对位清理,且使用者需要对小型风机进行拆装时,不需要拆下对位螺纹组件,利用伸缩槽孔与装杆将侧边的连接侧板抽出,拆下其内部装配的小型风机即可。
附图说明
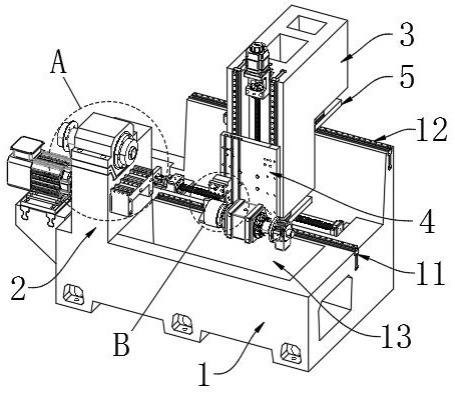
16.图1为本实用新型正面结构示意图;
17.图2为本实用新型正面局部结构示意图;
18.图3为本实用新型可拆式清理机构立体结构示意图。
19.图中:1、主体;101、旋转母件;102、子转动件;103、连装基座;104、第一旋转轴;105、连接杆;106、第二旋转轴;107、贴装转头;108、伸缩组件;2、装配机构;201、装配基座;202、连装件;203、螺装槽;204、限位螺栓;3、可拆式清理机构;301、焊装架;302、装配空槽;303、小型风机;304、伸缩槽孔;305、装杆;306、连接侧板;307、螺纹槽口;308、对位螺纹组件;309、风口架;4、焊枪组件。
具体实施方式
20.如图1-2所示,一种智能化电弧焊机器人,包括:主体1;主体1的一侧端头设置有装配机构2,且主体1的另一端端头连接有可拆式清理机构3,可拆式清理机构3的一侧设置有焊枪组件4,主体1包括旋转母件101、子转动件102、连装基座103、第一旋转轴104、连接杆105、第二旋转轴106、贴装转头107和伸缩组件108,且旋转母件101的端侧中端装配有子转动件102,子转动件102的侧边固定有连装基座103,且连装基座103的两侧中端设置有第一旋转轴104,第一旋转轴104的中部连接有连接杆105,且连接杆105的顶部一端设置有第二旋转轴106,第二旋转轴106的内侧固定有贴装转头107,且贴装转头107的底端中部装配有伸缩组件108,贴装转头107通过第二旋转轴106与连接杆105构成旋转结构,且连接杆105、第一旋转轴104与连装基座103三者为旋转连接,第一旋转轴104与第二旋转轴106两者利用自身的旋转性可以通过事先设计好的编程程序来对焊枪组件4达到高角度多样化的可调节
效果,当加工件需要电弧焊的点位较为偏杂时,其焊枪组件4也可以有效达到电弧焊接的有益效果,装配机构2包括装配基座201、连装件202、螺装槽203和限位螺栓204,且装配基座201的侧边固定有连装件202,装配基座201中部两侧设置有螺装槽203,且螺装槽203的中部中端设置有限位螺栓204,螺装槽203与限位螺栓204两者之间为螺纹连接,且螺装槽203和限位螺栓204沿着装配基座201的横向中轴线对称分布,螺装槽203与限位螺栓204的螺纹组合方便使用者对主体1进行限位固定,其拆装的效果可以提高主体1的电弧焊接的角度,可贴墙式安装的同时也可坐地式的装配,适应性较强。
21.如图3所示,一种智能化电弧焊机器人,可拆式清理机构3包括焊装架301、装配空槽302、小型风机303、伸缩槽孔304、装杆305、连接侧板306、螺纹槽口307、对位螺纹组件308和风口架309,且焊装架301的边侧设置有装配空槽302,装配空槽302的内部装配有小型风机303,焊装架301的上方一侧设置有伸缩槽孔304,且伸缩槽孔304的内部中端设置有装杆305,装杆305的边端设置有连接侧板306,连接侧板306通过伸缩槽孔304与装杆305和焊装架301构成伸缩可拆结构,且伸缩槽孔304与装杆305设置有两个,且装杆305的上方设置有螺纹槽口307,焊装架301的顶端一侧设置有对位螺纹组件308,且焊装架301的底端一侧设置有风口架309,装杆305通过螺纹槽口307与对位螺纹组件308和焊装架301构成螺纹限位结构,且螺纹槽口307与对位螺纹组件308设置有两组,焊枪组件4在进行电弧焊的过程中难免会产生焊渣,一般需要事后进行人工专业清理,会给使用者带来许多清理上的麻烦,此时使用者可将小型风机303开启,小型风机303的型号为6548zwf,使其对准风口架309对产生的焊渣进行对位清理,且使用者需要对小型风机303进行拆装时,不需要拆下对位螺纹组件308,利用伸缩槽孔304与装杆305将侧边的连接侧板306抽出,拆下其内部装配的小型风机303即可。
22.工作原理:对于这类的智能化电弧焊机器人,首先第一旋转轴104与第二旋转轴106两者利用自身的旋转性可以通过事先设计好的编程程序来对焊枪组件4达到高角度多样化的可调节效果,当加工件需要电弧焊的点位较为偏杂时,其焊枪组件4也可以有效达到电弧焊接的有益效果,且螺装槽203与限位螺栓204的螺纹组合方便使用者对主体1进行限位固定,其拆装的效果可以提高主体1的电弧焊接的角度,可贴墙式安装的同时也可坐地式的装配,适应性较强,然而焊枪组件4在进行电弧焊的过程中难免会产生焊渣,一般需要事后进行人工专业清理,会给使用者带来许多清理上的麻烦,此时使用者可将小型风机303开启,使其对准风口架309对产生的焊渣进行对位清理,且使用者需要对小型风机303进行拆装时,不需要拆下对位螺纹组件308,利用伸缩槽孔304与装杆305将侧边的连接侧板306抽出,拆下其内部装配的小型风机303即可。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。