1.本实用新型属于养猪用器械技术领域,具体为一种基于并联机构的病死猪搬运机械。
背景技术:
2.在大型养猪厂内猪舍密集,每个猪舍都有多只猪共用,猪的活动空间狭窄,猪也很容易生病或者因其他不可抗拒的因素死亡,很容易造成交叉感染。
3.现如今我们处理病死猪,依然是传统的搬运深埋,但是在进行病死猪拖运时依然存在很大的风险,主要考虑的是人与病死猪的接触,以及病死猪进行搬运过程的损伤问题,很可能造成猪只之间以及人与猪的传染问题,大部分养殖人员都是通过钩子刺入猪的下颚进行拖拽,这会造成猪表面的损伤,病死猪的血液会残留在地上,猪是一种好动,会用鼻子去拱,造成病毒的交叉感染。
技术实现要素:
4.针对上述情况,为克服现有技术的缺陷,本实用新型提供一种基于并联机构的病死猪搬运机械,有效的解决了目前病死猪拖运与人接触造成传染,以及猪与猪之间的交叉感染的问题。
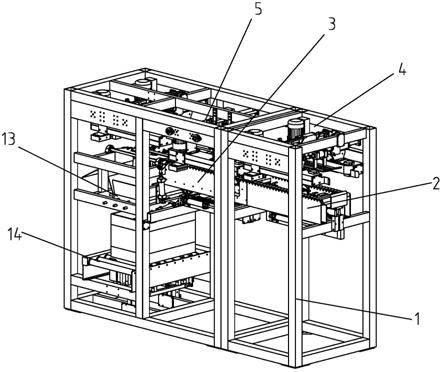
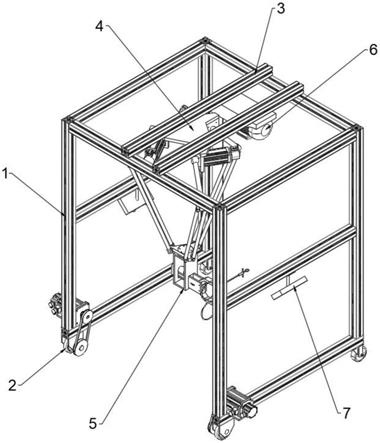
5.为实现上述目的,本实用新型提供如下技术方案:一种基于并联机构的病死猪搬运机械,包括车架,所述车架下端安装有移动轮机构,车架上端对称连接有横梁,横梁下端一侧连接有并联机构,并联机构下端连接有套环机构,横梁下端且位于并联机构一侧连接有提升机构,车架两侧均安装有双目视觉摄像头。
6.优选的,所述移动轮机构包括安装于车架下端一侧的两个万向轮,车架下端远离万向轮一侧连接有滚轮架,滚轮架内部通过转轴连接有滚轮,转轴一端延伸至滚轮架外部连接有大带轮,车架一端安装有电机固定板,电机固定板一端连接有行走电机,行走电机输出端连接有小带轮,小带轮与大带轮之间通过皮带传动连接。
7.优选的,所述并联机构包括安装于横梁下端的静平台,静平台下端周向等角度连接有定位板,定位板为三个,三个定位板一端均安装有并联电机,并联电机输出端连接有主动臂,主动臂下端套接有固定套,固定套一端通过球铰转动连接有从动臂,从动臂一端通过球铰转动连接有动平台。
8.优选的,所述套环机构包括安装框,安装框一端嵌装有电动推杆,安装框另一端嵌装有u型板,电动推杆输出端贯穿延伸至u型板内部,u型板两端对称开设有滑槽。
9.优选的,所述u型板内部且位于电动推杆输出端连接有连接筒,连接筒一端连接有u型座,u型座内部连接有销杆,销杆两端分别位于两侧的滑槽内部活动连接,u型座内部且位于销杆外端套接有连杆,连杆为两个,两个连杆一端均转动连接有机械爪,机械爪与u型板转动连接,两个机械爪一端均连接有电磁铁。
10.优选的,所述电磁铁一端吸附连接有固定座,固定座一端连接有套环,套环尾端连
接有环形卡扣。
11.优选的,所述提升机构包括安装于横梁下端的安装壳,安装壳下端安装有提升电机,提升电机输出端连接有绞盘,绞盘外端缠绕有钢丝绳,钢丝绳下端连接有套钩。
12.优选的,所述钢丝绳外端套设有橡胶套。
13.与现有技术相比,本实用新型的有益效果是:
14.(1)、本实用新型避免了人与猪的直接接触,有效的隔绝外来的传染源,并且在抓取猪只的过程中,不损伤猪的部位,只是抓取猪的后脚有利于后续的拖运过程,减轻了人工成本,极大程度上避免了交叉感染,对病死猪的处理实现机械化操作,对未来猪场自动化有一定的借鉴意义;
15.(2)、该新型车架框架整体结构稳定,能够在复杂的猪舍环境下行进,且采用并联机构,具有三个自由度,运行灵敏度高,刚度强,能很好地操纵控制。
附图说明
16.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。
17.在附图中:
18.图1为本实用新型结构示意图;
19.图2为本实用新型移动轮机构的结构示意图;
20.图3为本实用新型电机固定板的结构示意图;
21.图4为本实用新型并联机构的结构示意图;
22.图5为本实用新型套环机构的结构示意图;
23.图6为本实用新型套环机构的分解图;
24.图7为本实用新型提升机构的结构示意图;
25.图中:1、车架;2、移动轮机构;201、万向轮;202、滚轮架;203、转轴;204、滚轮;205、大带轮;206、电机固定板;207、行走电机;208、小带轮;209、皮带;3、横梁;4、并联机构;401、静平台;402、定位板;403、并联电机;404、主动臂;405、固定套;406、从动臂;407、动平台;5、套环机构;501、安装框;502、电动推杆;503、u型板;504、滑槽;505、连接筒;506、u型座;507、销杆;508、连杆;509、机械爪;510、电磁铁;511、固定座;512、套环;513、环形卡扣;6、提升机构;601、安装壳;602、提升电机;603、绞盘;604、钢丝绳;605、套钩;7、双目视觉摄像头。
具体实施方式
26.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例;基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
27.实施例一,由图1-图7给出,本实用新型包括车架1,车架1下端安装有移动轮机构2,车架1上端对称连接有横梁3,横梁3下端一侧连接有并联机构4,并联机构4下端连接有套环机构5,横梁3下端且位于并联机构4一侧连接有提升机构6,车架1两侧均安装有双目视觉摄像头7;
28.移动轮机构2用于将车架1驱动行走,并联机构4用于将套环机构5移动到一个空间位置,使得套环机构5上的套环512能够套进猪脚的合适位置,提升机构6用于将套接后的病死猪向上提起,然后在移动轮机构2的作用下移动至指定位置,双目视觉摄像头7用于检测病死猪猪脚位置,方便套环512套接。
29.实施例二,在实施例一的基础上,移动轮机构2包括安装于车架1下端一侧的两个万向轮201,车架1下端远离万向轮201一侧连接有滚轮架202,滚轮架202内部通过转轴203连接有滚轮204,转轴203一端延伸至滚轮架202外部连接有大带轮205,车架1一端安装有电机固定板206,电机固定板206一端连接有行走电机207,行走电机207输出端连接有小带轮208,小带轮208与大带轮205之间通过皮带209传动连接;
30.通过行走电机207驱动小带轮208转动,在皮带209的传动下,使得大带轮205转动,进而转轴203带动滚轮204转动,使得车架1进行移动。
31.实施例三,在实施例一的基础上,并联机构4包括安装于横梁3下端的静平台401,静平台401下端周向等角度连接有定位板402,定位板402为三个,三个定位板402一端均安装有并联电机403,并联电机403输出端连接有主动臂404,主动臂404下端套接有固定套405,固定套405一端通过球铰转动连接有从动臂406,从动臂406一端通过球铰转动连接有动平台407。
32.实施例四,在实施例一的基础上,套环机构5包括安装框501,安装框501一端嵌装有电动推杆502,安装框501另一端嵌装有u型板503,电动推杆502输出端贯穿延伸至u型板503内部,u型板503两端对称开设有滑槽504,u型板503内部且位于电动推杆502输出端连接有连接筒505,连接筒505一端连接有u型座506,u型座506内部连接有销杆507,销杆507两端分别位于两侧的滑槽504内部活动连接,u型座506内部且位于销杆507外端套接有连杆508,连杆508为两个,两个连杆508一端均转动连接有机械爪509,机械爪509与u型板503转动连接,两个机械爪509一端均连接有电磁铁510,电磁铁510一端吸附连接有固定座511,固定座511一端连接有套环512,套环512尾端连接有环形卡扣513;
33.电动推杆502的推杆部分通过插销与机械爪509的连接筒505相连接,连接筒505的另一端与机械爪509的两个连杆508通过销杆507固定,销杆507只能沿着u型板503中的滑槽504来回移动,用于控制两个机械爪509的间距大小,保证套环512能准确的定位两个猪脚的位置,套上猪的后脚关节处,套环512的后端的环形卡扣513与提升机构6上的套钩605连接,此时打开提升机构6中的提升电机602,使其驱动绞盘603转动,收紧钢丝绳604带动环形卡扣513收紧,慢慢将病死猪吊起,随后将病死猪运送到指定位置。
34.实施例五,在实施例一的基础上,提升机构6包括安装于横梁3下端的安装壳601,安装壳601下端安装有提升电机602,提升电机602输出端连接有绞盘603,绞盘603外端缠绕有钢丝绳604,钢丝绳604下端连接有套钩605,钢丝绳604外端套设有橡胶套;
35.通过提升电机602驱动绞盘603转动,收紧钢丝绳604带动环形卡扣513收紧,慢慢将病死猪吊起,钢丝绳604外端的橡胶套能够在索紧病死猪猪脚的过程中不损伤猪的皮肤。
36.工作原理:在使用时,通过行走电机207转动带动小带轮208转动,在皮带209的传动下,使得大带轮205转动,进而转轴203带动滚轮204转动,配合一侧的万向轮201,从而驱动整个车架1移动到要搬运的病死猪处,使整个车架1保持平稳,通过双目视觉摄像头7识别病死猪的猪后脚特征,优选的,该新型中还包括视觉控制系统,视觉控制系统包括数据处理
模块、单片机和控制器,双目视觉摄像头7将得到的图像数据输送给数据处理模块,数据处理模块通过计算得到猪脚的空间位置坐标以及两个猪脚的位置大小,单片机通知套环机构5中的电动推杆502伸缩,使机械爪509张开一个合适的大小,数据处理模块通过猪脚的空间位置,以及当前机械爪509所处的坐标经过矩阵变换得到机械爪509的运动路径,然后将数据发送给单片机,单片机给控制器下指令,控制并联机构4中的三个并联电机403的转动,并联电机403带动主动臂404和从动臂406将动平台407移动到一个空间位置,将套环512套进猪脚的合适位置,控制电磁阀开关关闭,然后将并联机构4收回到起始位置,套环512尾端的环形卡扣513与套钩605连接,此时打开提升机构6开关,使得提升电机602带动绞盘603转动收紧钢丝绳604,随着钢丝绳604的逐渐收紧,将套环512缓缓锁紧,随着提升机构6的运作,病死猪慢慢吊起,到一个合适的位置,完成病死猪的抓取,关闭提升机构6,打开移动轮机构2驱动车架1移动,将病死猪搬运到指定位置。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。