1.本实用新型涉及竖井掘进技术领域,尤其涉及一种竖井用浮渣清扫机器人及井壁浮渣清扫装置。
背景技术:
2.在对竖井进行掘进过程中,井壁上残留的浮渣会影响掘进机下行的稳定性。目前,虽然有一些清扫机构可对竖井井壁上的浮渣进行清扫,但是结构复杂、操作不便,无法在掘进的同时沿竖井的周向完成整圈内壁的清扫工作,对浮渣的清扫效果并不理想。
3.针对相关技术中对竖井井壁上残留的浮渣清扫效果不佳的问题,目前尚未给出有效的解决方案。
4.由此,本发明人凭借多年从事相关行业的经验与实践,提出一种竖井用浮渣清扫机器人及井壁浮渣清扫装置,以克服现有技术的缺陷。
技术实现要素:
5.本实用新型的目的在于提供一种竖井用浮渣清扫机器人及井壁浮渣清扫装置,可对竖井挖掘机同步作业,实现开完的同时完成井壁的清扫工作,有效提高工作效率。
6.本实用新型的另一目的在于提供一种竖井用浮渣清扫机器人及井壁浮渣清扫装置,可对清扫位置在竖向以及横向上进行调整,并且在清扫过程中可自适应井壁的局部凸凹位置,对浮渣彻底清扫的同时不会由于与井壁之间的应力而造成设备的损坏,具有良好的适用性。
7.本实用新型的目的可采用下列技术方案来实现:
8.本实用新型提供了一种竖井用浮渣清扫机器人,包括对井壁上的浮渣进行清扫的清扫机构、带动所述清扫机构在井筒内沿其周向移动的行走机构、在竖向上对所述清扫机构的位置进行调节的竖向伸缩机构和在水平方向上对所述清扫机构的位置进行调节的横向伸缩机构,其中:
9.所述行走机构能移动地设置于所述井筒内的环形轨道上,所述竖向伸缩机构的固定部分与所述行走机构的底部连接,所述竖向伸缩机构的伸缩部分与所述横向伸缩机构的固定部分连接,所述清扫机构与所述横向伸缩机构的伸缩部分连接,以带动所述清扫机构移动至与所述井壁相接触的位置。
10.在本实用新型的一较佳实施方式中,所述行走机构包括行走轮和驱动所述行走轮转动的第一驱动装置,所述行走轮与所述轨道滑动连接,所述第一驱动装置的输出轴与所述行走轮的中心轴连接。
11.在本实用新型的一较佳实施方式中,所述第一驱动装置的输出轴与所述行走轮的中心轴之间通过齿轮传动结构连接。
12.在本实用新型的一较佳实施方式中,所述竖向伸缩机构包括沿竖向设置的第一油缸,所述第一油缸的缸体与所述行走机构的底部连接,所述第一油缸的活塞杆沿竖向向下
伸出,且所述第一油缸的活塞杆与所述横向伸缩机构连接。
13.在本实用新型的一较佳实施方式中,所述竖向伸缩机构还包括拉线传感器,所述拉线传感器连接于所述第一油缸的缸体与所述第一油缸的活塞杆之间。
14.在本实用新型的一较佳实施方式中,所述横向伸缩机构包括沿水平方向设置的第二油缸,所述第二油缸的缸体的顶部与所述竖向伸缩机构的伸缩部分连接,所述第二油缸的活塞杆沿水平方向伸出,且所述第二油缸的活塞杆与所述清扫机构连接。
15.在本实用新型的一较佳实施方式中,所述第二油缸的底部设置有安装板,所述安装板上设置有相配合以对所述清扫机构在水平方向上的移动距离进行测量的第一测距装置和第二测距装置。
16.在本实用新型的一较佳实施方式中,所述第二油缸的缸体且远离所述清扫机构的一侧设置有配重块。
17.在本实用新型的一较佳实施方式中,所述清扫机构包括清扫刷、防护罩、第二驱动装置和浮动外壳,所述浮动外壳与所述横向伸缩机构的伸缩部分连接,所述第二驱动装置设置于所述浮动外壳的内部,所述清扫刷位于所述浮动外壳的外部且所述清扫刷的中心轴与所述第二驱动装置的输出轴连接,所述防护罩与所述浮动外壳的外壁连接,且所述防护罩罩设于所述清扫刷的外侧,所述清扫刷的刷头部分伸出至所述防护罩的外部并与所述井壁相接触。
18.在本实用新型的一较佳实施方式中,所述清扫机构与所述横向伸缩机构的伸缩部分之间设置有自适应浮动机构;
19.所述自适应浮动机构包括多根滑杆,各所述滑杆的一端分别与所述横向伸缩机构的伸缩部分连接,所述浮动外壳与各所述滑杆能滑动地连接,且各所述滑杆的另一端分别设置有对所述浮动外壳的滑动距离进行限位的螺母,各所述滑杆上分别套设有弹簧,所述弹簧的两端分别与所述横向伸缩机构的伸缩部分和所述浮动外壳的外壁相抵接。
20.本实用新型提供了一种井壁浮渣清扫装置,包括轨道和上述的竖井用浮渣清扫机器人,所述轨道为位于井筒内且沿所述井筒的周向设置的环形轨道,所述竖井用浮渣清扫机器人位于所述轨道的下方,且所述竖井用浮渣清扫机器人通过其顶部的行走机构与所述轨道能移动地连接。
21.在本实用新型的一较佳实施方式中,所述井筒内设置有竖井挖掘机,所述轨道设置于所述竖井挖掘机的支撑梁的底部。
22.在本实用新型的一较佳实施方式中,所述竖井用浮渣清扫机器人位于所述竖井挖掘机的刀盘的上方。
23.由上所述,本实用新型的竖井用浮渣清扫机器人及井壁浮渣清扫装置的特点及优点是:在井筒内的环形轨道上设置有行走机构,且行走机构的下方设置有与清扫机构相连接的竖向伸缩机构和的横向伸缩机构,通过竖向伸缩机构和横向伸缩机构可分别在竖向上和横向上对清扫机构的位置进行调节,使清扫机构能够准确移动至井壁上的待清扫位置并使清扫机构与井壁充分接触,保证能够对井壁上的浮渣进行彻底清扫;另外,行走机构可带动清扫机构沿轨道进行移动,从而可实现对井壁一周的自动清扫,无需工作人员手动移动清扫机构的位置,自动化程度更高,节省人力物力,有效提高清渣效率。
附图说明
24.以下附图仅旨在于对本实用新型做示意性说明和解释,并不限定本实用新型的范围。其中:
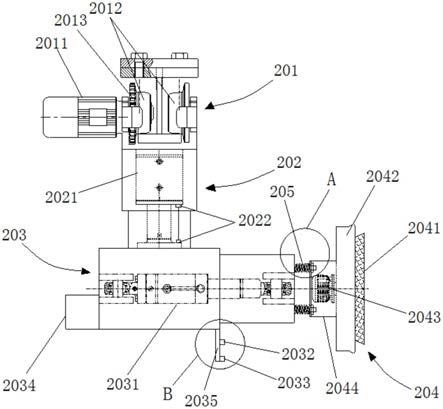
25.图1:为本实用新型竖井用浮渣清扫机器人的结构示意图。
26.图2:为图1中b位置的局部放大图。
27.图3:为图1中a位置的局部放大图。
28.图4:为本实用新型井壁浮渣清扫装置的安装位置示意图。
29.图5:为本实用新型井壁浮渣清扫装置中轨道的结构示意图。
30.本实用新型中的附图标号为:
31.1、竖井挖掘机;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
101、刀盘;
32.102、支撑梁;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
103、轨道;2、竖井用浮渣清扫机器人;
33.201、行走机构;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2011、第一驱动装置;
34.2012、行走轮;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2013、齿轮传动结构;
35.202、竖向伸缩机构;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2021、第一油缸;
36.2022、拉线传感器;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
203、横向伸缩机构;
37.2031、第二油缸;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2032、第一测距装置;
38.2033、第二测距装置;
ꢀꢀꢀꢀꢀꢀꢀꢀ
2034、配重块;
39.2035、安装板;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
204、清扫机构;
40.2041、清扫刷;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2042、防护罩;
41.2043、第二驱动装置;
ꢀꢀꢀꢀꢀꢀꢀꢀ
2044、浮动外壳;
42.205、自适应浮动机构;
ꢀꢀꢀꢀꢀꢀꢀ
2051、滑杆;
43.2052、螺母;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2053、弹簧;
44.3、井壁。
具体实施方式
45.为了对本实用新型的技术特征、目的和效果有更加清楚的理解,现对照附图说明本实用新型的具体实施方式。
46.实施方式一
47.如图1至图5所示,本实用新型提供了一种竖井用浮渣清扫机器人,该竖井用浮渣清扫机器人包括清扫机构204、行走机构201、竖向伸缩机构202和横向伸缩机构203,清扫机构204用于对井壁3上的浮渣进行清扫,行走机构201用于带动清扫机构204在井筒内沿井筒的周向移动,以使清扫机构204能够对井壁3的一周完成清扫,竖向伸缩机构202用于在竖直方向上对清扫机构204的位置进行调节,横向伸缩机构203用于水平方向上对清扫机构204的位置进行调节。其中:行走机构201能移动地设置于井筒内的环形轨道103上,竖向伸缩机构202的固定部分与行走机构201的底部连接,竖向伸缩机构202的伸缩部分与横向伸缩机构203的固定部分连接,清扫机构204与横向伸缩机构203的伸缩部分连接,以带动清扫机构204移动至与井壁3相接触的位置。
48.本实用新型在井筒内的环形轨道103上设置有行走机构201,且行走机构201的下方设置有竖向伸缩机构202,竖向伸缩机构202的下方设置有横向伸缩机构203,在横向伸缩
机构203上连接有清扫机构204,通过竖向伸缩机构202可在竖直方向上对清扫机构204的位置进行调节,横向伸缩机构203可在横向(即:水平方向)上对清扫机构204的位置进行调节,进而通过竖向伸缩机构202和横向伸缩机构203相配合,可控制清扫机构204准确移动至井壁3上的待清扫位置并使清扫机构204与井壁3充分接触,保证能够对井壁3上的浮渣进行彻底清扫;另外,由于行走机构201可带动清扫机构204沿轨道103进行移动,从而可实现对井壁3一周的自动清扫,无需工作人员手动移动清扫机构204的位置,自动化程度更高,节省人力物力,有效提高清渣效率。
49.在本实用新型的一个可选实施例中,如图1、图4、图5所示,行走机构201包括行走轮2012和驱动行走轮2012转动的第一驱动装置2011,行走轮2012与轨道103滑动连接,第一驱动装置2011的输出轴与行走轮2012的中心轴连接。通过第一驱动装置2011驱动行走轮2012转动,从而使得行走机构201能够沿轨道103移动。
50.进一步,第一驱动装置2011包括但不限于驱动电机。
51.进一步的,如图1所示,第一驱动装置2011的输出轴与行走轮2012的中心轴之间通过齿轮传动结构2013连接。其中,可在第一驱动装置2011的输出轴上设置有主动齿轮,并在行走轮2012的中心轴上设置从动齿轮,主动齿轮与从动齿轮相啮合,从而通过齿轮传动结构2013将第一驱动装置2011输出的动力传递至行走轮2012,以驱动行走轮2012转动。
52.在本实用新型的一个可选实施例中,如图1所示,竖向伸缩机构202包括沿竖直方向设置的第一油缸2021(即:油缸的活塞杆沿竖直方向设置),第一油缸2021的缸体与行走机构201的底部通过连接件(未示出)连接,第一油缸2021的活塞杆沿竖直方向向下伸出,且第一油缸2021的活塞杆的端部与横向伸缩机构203连接,通过控制第一油缸2021的活塞杆的伸出长度,就可对清扫机构204在竖直方向上的移动距离进行控制。其中,行走轮2012和第一驱动装置2011均可设置于连接件上,通过连接件将竖向伸缩机构202吊装于行走机构201的下方。
53.进一步的,如图1所示,竖向伸缩机构202还包括拉线传感器2022,拉线传感器2022连接于第一油缸2021的缸体与第一油缸2021的活塞杆的端部之间。通过拉线传感器2022实时检测第一油缸2021的活塞杆的伸出长度,进而可获知清扫机构204在竖直方向上的移动距离。
54.在本实用新型的一个可选实施例中,如图1所示,横向伸缩机构203包括沿水平方向设置的第二油缸2031(即:油缸的活塞杆沿水平方向设置),第二油缸2031的缸体的顶部与竖向伸缩机构202的伸缩部分(即:第一油缸2021的活塞杆的端部)连接,第二油缸2031的活塞杆沿水平方向伸出,且第二油缸2031的活塞杆的端部与清扫机构204连接,通过控制第二油缸2031的活塞杆的伸出长度,就可对清扫机构204在水平方向上的移动距离进行控制。
55.进一步的,如图1、图2所示,第二油缸2031的底部设置有安装板2035,安装板2035沿竖直方向设置,安装板2035的顶部与第二油缸2031的缸体的底部连接,安装板2035上且朝向清扫机构204的一侧分别设置有第一测距装置2032和第二测距装置2033,通过第一测距装置2032和第二测距装置2033相配合可对清扫机构204在水平方向上的移动距离进行测量,从而确保清扫机构204能够与井壁3相接触,达到对浮渣彻底清扫的目的。其中,第一测距装置2032可用于测量其与清扫机构204之间的距离,第二测距装置2033可用于测量其与井壁3之间的距离,通过计算差值即可精确得到第二油缸2031的活塞杆的伸出距离,从而获
知清扫机构204在水平方向上的移动距离。
56.进一步的,第一测距装置2032和第二测距装置2033均包括但不限于激光测距仪。
57.进一步的,如图1所示,第二油缸2031的缸体上且远离清扫机构204的一侧设置有配重块2034,以保证第二油缸2031的两侧受力平衡,提高清扫机构204的稳定性。
58.在本实用新型得有一个可选实施例中,如图1所示,清扫机构204包括清扫刷2041、第二驱动装置2043和浮动外壳2044,浮动外壳2044与横向伸缩机构203的伸缩部分(即:第二油缸2031的活塞杆的端部)连接,第二驱动装置2043设置于浮动外壳2044的内部,清扫刷2041位于浮动外壳2044的外部且清扫刷2041的中心轴与第二驱动装置2043的输出轴连接,通过第二驱动装置2043可带动清扫刷2041转动,从而对附着于井壁3上的浮渣进行清扫。
59.进一步的,如图1所示,清扫机构204包括还包括防护罩2042,防护罩2042与浮动外壳2044的外壁连接,且防护罩2042罩设于清扫刷2041的外侧,防护罩2042上远离浮动外壳2044一侧为敞口设置,清扫刷2041的刷头部分由敞口处伸出至防护罩2042的外部并与井壁3相接触。通过防护罩2042对各结构件起到防护作用,避免浮渣飞溅而损坏各结构件。
60.进一步的,第二驱动装置2043包括但不限于驱动电机。
61.在本实用新型得有一个可选实施例中,如图1所示,清扫机构204与横向伸缩机构203的伸缩部分(即:第二油缸2031的活塞杆的端部)之间设置有自适应浮动机构205,通过自适应浮动机构205可在小范围内对清扫机构204的位置进行调节,使清扫机构204能够适应井壁3上局部凹凸不平的位置,确保清扫刷2041始终与井壁3充分接触;另外,自适应浮动机构205的设置还能够避免清扫刷2041与井壁3之间的应力而造成结构件的损坏。
62.具体的,如图1、图3所示,自适应浮动机构205包括多根滑杆2051,各滑杆2051的一端分别与横向伸缩机构203的伸缩部分(即:第二油缸2031的活塞杆的端部)连接,浮动外壳2044与各滑杆2051能滑动地连接,且各滑杆2051的另一端分别设置有螺母2052,通过螺母2052对浮动外壳2044的滑动距离进行限位,各滑杆2051上分别套设有弹簧2053,弹簧2053的一端与横向伸缩机构203的伸缩部分相抵接,弹簧2053的另一端与浮动外壳2044的外壁相抵接。当清扫刷2041移动至井壁3上凹凸不平的位置时,清扫刷2041会根据井壁3对其的作用力带动浮动外壳2044在滑杆2051上移动,从而使清扫刷2041适应井壁3的凹凸不同的位置,在浮动外壳2044受压的过程中,弹簧2053始终向浮动外壳2044提供反向的弹力,以确保清扫刷2041能够与井壁3充分接触,达到清扫刷2041自适应调节的目的。
63.本实用新型的竖井用浮渣清扫机器人的特点及优点是:
64.一、该竖井用浮渣清扫机器人可对清扫机构204在竖直方向以及水平方向上的位置分别进行调控,使清扫机构204准确找到待清扫位置并使清扫机构204与井壁3充分接触,保证能够对井壁3上的浮渣进行彻底清扫。
65.二、该竖井用浮渣清扫机器人通过拉线传感器2022可实时检测第一油缸2021的活塞杆的伸出长度,进而可获知清扫机构204在竖直方向上的移动距离,提高清扫机构204在竖直方向上位置调控的精准度。
66.三、该竖井用浮渣清扫机器人通过第一测距装置2032与第二测距装置2033相配合,可获知清扫机构204在水平方向上的移动距离,提高清扫机构204在水平方向上位置调控的精准度。
67.四、该竖井用浮渣清扫机器人上设置有自适应浮动机构205,可在小范围内对清扫
机构204的位置进行调节,使清扫机构204能够适应井壁3上局部凹凸不平的位置,确保清扫刷2041始终与井壁3充分接触,而且自适应浮动机构205的设置还能够避免清扫刷2041与井壁3之间的应力而造成结构件的损坏。
68.实施方式二
69.如图4、图5所示,本实用新型提供了一种井壁浮渣清扫装置,该井壁浮渣清扫装置包括轨道103和上述的竖井用浮渣清扫机器人2,轨道103为位于井筒内且沿井筒的周向设置的环形轨道,竖井用浮渣清扫机器人2位于轨道103的下方,且竖井用浮渣清扫机器人2通过其顶部的行走机构201与轨道103能移动地连接。
70.进一步的,如图4所示,井筒内设置有竖井挖掘机1,轨道103设置于竖井挖掘机1的支撑梁102的底部,竖井用浮渣清扫机器人2位于竖井挖掘机1的刀盘101的上方。
71.本实用新型的工作过程为:当竖井挖掘机1正常掘进时,竖井用浮渣清扫机器人2的行走轮2012通过第一驱动装置2011的控制在环形轨道103上行走,通过竖向伸缩机构202和横向伸缩机构203的配合控制清扫刷2041的移动位置,使清扫刷2041贴紧井壁3,竖向伸缩机构202的伸缩量通过拉线传感器2022的进行测量和调整,横向伸缩机构203的伸缩量通过第一测距装置2032和第二测距装置2033进行测量,并根据测距差值进行调整,随着行走机构201沿轨道103的周向移动带动清扫刷2041实现浮渣的清理。清扫完一个圆周循环后,控制竖向伸缩机构202实现清扫刷2041的下移,进而对下方井壁3进行下一圆周的清扫。当遇到断层或井壁3上小范围的凹凸位置时,可通过横向伸缩机构203的活塞杆的伸出或缩回以及自适应浮动机构205来实现凹凸不平的井壁3的浮渣清理。当需要更换清扫刷2041时,横向伸缩机构203的活塞杆缩回,竖向伸缩机构202的伸缩杆下放,工作人员即可对清扫刷2041进行快速更换。
72.本实用新型的井壁浮渣清扫装置的特点及优点是:
73.一、该井壁浮渣清扫装置可对竖井挖掘机同步作业,实现开完的同时完成井壁的清扫工作,有效提高工作效率。
74.二、该井壁浮渣清扫装置结构简单、自动化程度高,对井壁3上的浮渣清扫彻底,使用效果显著,能够有效提高竖井挖掘机的成井质量。
75.以上所述仅为本实用新型示意性的具体实施方式,并非用以限定本实用新型的范围。任何本领域的技术人员,在不脱离本实用新型的构思和原则的前提下所作出的等同变化与修改,均应属于本实用新型保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
