成像元件清洁装置
1.相关申请的交叉引用
2.本pct申请要求以下专利申请的优先权:2019年10月4日提交的、序列号为16/593,150的标题为“imaging element cleaning apparatus(成像元件清洁装置)”的共同未决美国非临时专利申请,2019年10月4日提交的、序列号为16/593,204的标题为“imaging element cleaning apparatus with structure-mandated cleaning member motion control(具有结构授权的清洁构件运动控制的成像元件清洁装置)”的共同未决美国非临时专利申请,和2019年10月4日提交的、序列号为16/593,244的标题为“imaging element cleaning apparatus”的共同未决美国非临时专利申请,同时所有这些专利申请具有的共同申请人,并通过引用以其整体并入本文。
3.本公开内容的领域
4.本文所公开的内容总体上涉及利用远程成像元件对隐蔽部位处的结构进行可视化的设备的清洁,并且更具体地,涉及成像元件清洁装置,用于在成像元件的暴露表面位于隐蔽部位(例如人类或动物的活体内环境)内时清洁该暴露表面。
5.背景
6.对目标手术部位使用活体内可视化的外科手术是众所周知的一种手术部位隐蔽形式。这些手术的示例包括但不限于内窥镜手术、腹腔镜手术、胸腔镜手术和类似手术。这些外科手术都使用具有一体的可视化设备的外科仪器,用于提供患者手术空间内的目标手术部位的活体内可视化。尽管在特定类型的外科手术的背景下常常提到外科仪器(例如,用于内窥镜手术的内窥镜、用于腹腔镜手术的腹腔镜和类似仪器),但这些外科仪器在本文总体上被称为“内窥镜”。
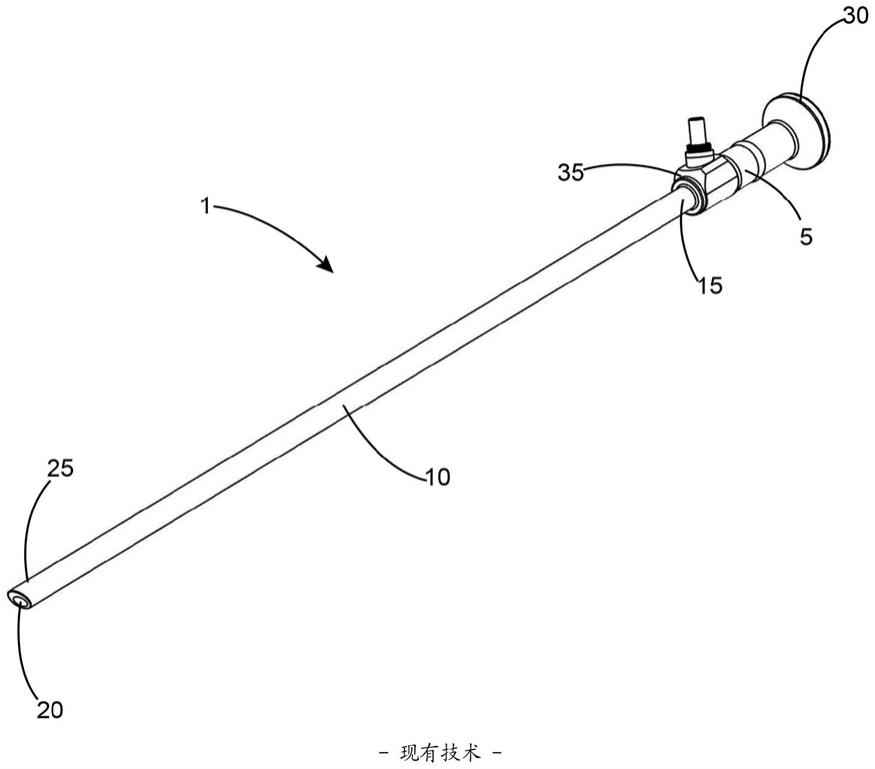
7.如图1中所示,用于这些外科手术的内窥镜1的特征在于具有用户接口部分(user interface portion)5和延伸部分10,延伸部分10在其近端15处连接到用户接口部分5。用于内窥镜手术的窥镜通常具有基本上是柔性的延伸部分,而用于其他类型外科手术的窥镜(例如用于腹腔镜手术,如图1所示)通常具有基本上是刚性的延伸部分10。延伸部分10在其远端部分25处具有诸如透镜的成像元件20。成像元件20可以具有暴露表面,典型地该暴露表面大致上与延伸部分10的端面大致齐平或限定延伸部分10的端面。成像元件20连接到内窥镜内部的光纤或其他图像传输元件。光纤或其他图像传输元件沿着延伸部分10的长度延伸并且终止于用户接口部分5上的目镜30。目镜30使得成像元件30能够连接到可视化设备(例如,连接到可视显示控制台的照相机),通过该可视化设备,手术人员可以查看目标手术部位。
8.在使用内窥镜的外科手术过程中,内窥镜的成像元件的暴露表面可能会由于一种或更多种活体内情况而受损。这些情况的示例包括成像元件的暴露表面在手术空间内因湿气变得不清楚,或者成像元件的暴露表面可能被血液或其他体液或组织(例如,间质液、脂肪组织或类似物)弄脏。目前,主要有两种不同的内窥镜清洁方法是常用的。这些清洁方法中的第一个是将内窥镜从体内移除,将成像元件擦拭干净,并将内窥镜重新插入体内。这种方法虽然有效,但耗时,并导致外科医生失去对手术部位的可视性,这可能被认为是危险
的,因为手术仪器通常留在体内。这种方法也会使患者面临更高的感染风险。这些清洁方法中的第二种是在附近的器官或组织上擦拭成像元件的暴露表面。尽管内窥镜留在体内,需要较少的时间来清洁,并且不会潜在地损害手术部位,但由于“清洁”表面不能提供有效的清洁性能或不过是进一步污染成像元件的暴露表面,这种方法通常不够有效。此外,当使用这些清洁方法中的任何一种时,外科医生必须在清洁成像元件后花费时间将内窥镜重新定位到手术部位。
9.至少,用于清洁成像元件的暴露表面的当前方法对于外科医生来说可能是一个障碍和烦恼,并且可能提供较差的清洁性能。此外,清洁成像元件的暴露表面的动作增加了外科手术所需的时间长度,从而减少了医院可用的手术室(or)时间量。由于浪费时间,以及可能的手术并发症和术后感染率,对医院、患者和保险公司来说也是昂贵的。此外,随着患者接受更长的手术,他们处于麻醉的时间也会增加。已经有显示麻醉时间的增加与手术并发症发生率和术后感染率的增加有关。因此,与当前常用方法中用于清洁成像元件的暴露表面的相关联的增加的时间不仅是一个障碍,而且潜在地在医学和经济上是昂贵的。
10.因此,为了保持所需的目标手术部位的可视化,希望设备的成像元件的暴露表面被清洁,同时设备的远端部分保持在隐蔽手术部位中(例如,活体内的内窥镜)。当设备的表面仍在隐蔽手术部位(例如,活体内的内窥镜)内时,旨在提供对这种设备的表面的清洁的已知方法和设备具有一个或更多个缺点(例如,缺乏效力、干扰外科手术、需要对外科医生优先的外科技术进行重大改变等)。因此,一种有效、高效、简单和可靠的方法,用于允许设备(例如,内窥镜)的成像元件的暴露表面被清洁同时装置的远端部分仍在隐蔽手术部位内(例如,在活体内),将是有利的、期望的和有用的。
11.本公开内容的概述
12.本发明的实施例涉及提供一种有效和可靠的方法,用于允许设备(例如,内窥镜)的成像元件(例如,透镜)的暴露表面被清洁,同时设备的远端部分位于隐蔽手术部位内(例如,在活体内)。更具体地说,本发明的一个或更多个实施例提供了一种与内窥镜一起使用的、用在一种或更多种类型的外科手术(例如,内窥镜手术、腹腔镜手术、胸腔镜手术和类似手术)中的装置,该装置包括清洁构件(例如,弹性聚合物擦拭件、海绵、吸收垫或类似物),该清洁构件用于在成像元件处于隐蔽手术部位内时对设备的成像元件的暴露表面进行清洁。该装置优选地适于将该设备安装在其上,但也可以完全或部分地与该设备的一个或更多个部件(例如,配置成用于承载、操作和操纵内窥镜的机械臂)成一体。
13.根据本发明的一个或更多个实施例的清洁装置可以配置为与市售内窥镜一起使用。这种内窥镜的尺寸要么已公布,要么可公开确定。由于知道了旨在与根据本发明的一个或更多个实施例的清洁装置一起使用的目标内窥镜的尺寸,根据本发明的一个或更多个实施例配置的清洁装置可以被设计成设备专用的。因此,将诸如内窥镜的设备接合在这些设备专用的清洁装置中的预期装置上优选地导致该设备具有在清洁装置上的安置构型(seated configuration),这展示出设备与清洁装置之间的高水平的尺寸精度。
14.尽管展示出如此高水平的尺寸精度,但该设备和清洁装置两者都具有各自的制造公差,这些公差可能影响清洁构件清洁成像元件的效率、有效性和可预测性。例如,鉴于根据本发明的实施例配置的清洁装置依赖于与设备的包括成像元件的部分的接触(例如,成像元件和清洁构件之间的直接表面接触),这些制造公差可能影响清洁构件在与成像元件
接触时表现出的力和/或偏移程度,从而影响清洁性能。类似地,在一些情况下(例如,清洁构件与成像元件接触的速度速率、清洁构件的运动方向等),其他考虑因素也可以影响清洁构件在与成像元件接触时表现出的力和/或偏移程度。
15.有利地,根据本发明的实施例配置的清洁装置可以包括用于选择性地调节清洁构件的轴向位置的机构,即轴向位置调节器。清洁构件的轴向位置对应于设备的远端部分(例如,内窥镜的延伸部分的远端部分)。在大多数情况下,轴向位置将对应于暴露在延伸部分的端面处的成像元件的面。通过对清洁构件的轴向位置的这种调节,用户可以改变清洁构件在与内窥镜和/或成像元件的端部部分接触时表现出的力和/或偏移的程度,从而优化清洁功能。
16.在本发明的一个或更多个实施例中,活体内内窥镜清洁装置包括底座、清洁构件和清洁构件控制器。底座适于将内窥镜安装在其上。当内窥镜安装在底座上时,清洁构件在邻近内窥镜的成像元件的位置处附接到底座。清洁构件控制器联接在底座和清洁构件之间,用于使清洁构件相对于底座选择性地运动。清洁构件控制器包括多个清洁构件控制机构。当内窥镜安装在底座上时,清洁构件控制机构中的至少一个相对于邻近内窥镜的成像元件的位置在收起位置和使用位置之间移动清洁构件。当内窥镜安装在底座上时,清洁构件控制机构中的至少一个将处于使用位置的清洁构件移动成与成像元件接触或移动成不与成像元件接触。清洁构件控制机构中的至少一个调节清洁构件在与成像元件接触时施加在成像元件上的接触力的水平。
17.在本发明的一个或更多个实施例中,活体内内窥镜清洁装置包括长形主体、清洁构件、用户接口主体、联接元件、轴向位置调节器和清洁构件控制机构。长形主体包括中央通道,中央通道适于将内窥镜的延伸部分安置于其中。长形主体的远端部分具有位于其中的开口,当内窥镜的延伸部分在长形主体的中央通道内处于安置构型时,附接到内窥镜的延伸部分的成像元件可通过该开口接近。清洁构件邻近长形主体的远端部分处的开口。用户接口主体连接到长形主体的近端。联接元件在联接元件的远端部分处固定地附接到清洁构件。清洁构件控制机构可移动地安装在用户接口主体上。轴向位置调节器可移动地附接到清洁构件控制结构,并固定地附接到联接元件的近端。轴向位置调节器的运动调节了清洁构件控制机构与清洁构件之间的距离。清洁构件控制机构的第一清洁构件操纵模式使得清洁构件能够相对于长形主体的远端部分在收起位置和使用位置之间移动。当清洁构件处于使用位置时,清洁构件控制机构的第二清洁构件操纵模式使得清洁构件能够移动成与成像元件接触或移动成不与成像元件接触。
18.在本发明的一个或更多个实施例中,提供了一种用于内窥镜清洁装置的清洁构件控制器。内窥镜清洁装置具有底座和附接到底座的清洁构件。底座适于将内窥镜以安置位置安装在其上。清洁构件控制器包括第一清洁构件控制机构和第二清洁构件控制机构。第一清洁构件控制机构附接到底座。第一清洁构件控制机构具有多个清洁构件操纵模式。当内窥镜安装在底座上时,清洁构件操纵模式中的第一操纵模式相对于邻近内窥镜的成像元件的位置在收起位置和使用位置之间移动清洁构件。当内窥镜安装在底座上时,清洁构件操纵模式中的第二操纵模式将处于使用位置的清洁构件移动成与成像元件接触和移动成不与成像元件接触。第二清洁构件控制机构具有可移动地附接到第一清洁构件控制机构的一部分,并且具有固定地附接到清洁构件的一部分。第二清洁构件控制机构的用户接口部
分相对于第一清洁构件控制机构的运动改变了清洁构件与第一清洁构件控制机构之间的距离,以调节清洁构件在与成像元件接触时施加在成像元件上的接触力的水平。
19.本发明的一个或更多个实施例的目的是提供一种清洁构件,该清洁构件是弹性擦拭件、半刚性擦拭件、吸收垫和海绵中的至少一个。
20.本发明的一个或更多个实施例的目的是提供一种单一控制机构,该单一控制机构提供多种清洁构件运动模式。
21.本发明的一个或更多个实施例的目的是提供对清洁构件的轴向位置的选择性调节。
22.本发明的一个或更多个实施例的目的是通过控制设备(其与提供多种清洁构件运动模式的单一控制机构成一体)来提供这种轴向距离可调性。
23.本发明的一个或更多个实施例的目的是提供一种位置指示结构,当清洁构件从使用位置的终点位置向收起位置轴向位移的距离为由位置指示结构限定的距离时,该位置指示结构提供用户终点指示。
24.本发明的一个或更多个实施例的目的是这种用户终点指示包括触觉指示和听觉指示中的至少一个。
25.本发明的这些和其他目的、实施例、优点和/或区别在进一步检阅下面的说明书、相关附图和所附权利要求时将变得明显。
26.附图简述
27.图1是示出了现有技术内窥镜的透视图。
28.图2是示出根据本发明第一实施例的内窥镜清洁装置的第一透视图。
29.图3是示出了图2的内窥镜的第二透视图。
30.图4是沿着图2中的线4-4截取的截面图。
31.图5是图2中所示的内窥镜清洁装置的局部透视图,其中第一清洁构件控制机构的控制主体处于延伸构型。
32.图6是图2中所示的内窥镜清洁装置的局部透视图,其中第一清洁构件控制机构的控制主体处于缩回构型。
33.图7是图2所示的内窥镜清洁装置的局部透视图,其中其清洁构件处于收起位置。
34.图8是图2所示的内窥镜清洁装置的局部透视图,其中其清洁构件处于使用位置。
35.图9是图2所示的内窥镜清洁装置的局部透视图,其中其清洁构件移动到其成像元件接触位置。
36.图10是图2所示的内窥镜清洁装置的局部透视图,其中其清洁构件移动超过其成像元件接触位置。
37.图11是沿着图2中的线11-11截取的截面图。
38.图12是示出根据本发明的一个或更多个实施例的用于提供清洁构件偏移功能的结构布置的部分截面图。
39.图13是示出根据本发明第二实施例的内窥镜清洁装置的透视图。
40.图14是沿着图13中的线14-14截取的截面图。
41.图15是图13所示的清洁装置的凸轮体的透视图。
42.图16是图15的凸轮体的第一平面视图。
43.图17是图15的凸轮体的第二平面视图。
44.图18是示出图15的凸轮体的凸轮段的轮廓的示意图。
45.详细描述
46.图2-10图示了根据本发明的第一实施例配置的活体内内窥镜清洁装置的各个方面,其被指定为清洁装置100。清洁装置100优选地但不是必须地配置成与市售内窥镜(例如图1的内窥镜1)一起使用。这种市售内窥镜的示例包括但不限于以karl storz、linvatec、olympus、richard wolf、stryker和intuitive surgical(即davinci)品牌名称所制造的内窥镜。为此,在优选实施例中,清洁装置100可以基于这种市售的内窥镜的尺寸属性,设计成针对一个或更多个制造商的给定型号的内窥镜专用的清洁装置。内窥镜清洁装置100被设计用于预定品牌或型号的内窥镜的方式的基本考虑是,在内窥镜和清洁装置之间有高水平的尺寸精度。这种尺寸精度的特征可以在于包括以下两点:对内窥镜和清洁装置100之间的相对运动的任何不可接受水平进行抑制,以及对内窥镜的关键结构元件相对于清洁装置100的关键结构元件的相对放置的任何不可接受水平进行抑制。
47.仍然参考图2,清洁装置100具有长形主体102,该长形主体102适于插入内窥镜1的延伸部分10。如图所示,在其完全安置位置中,内窥镜1的尺寸上可预测的表面或特征(例如用户接口部分5(例如,手柄和/或光学接口部分)的表面或特征)邻接内窥镜清洁装置100的匹配的尺寸上可预测的表面或特征。清洁装置100的该匹配表面或特征(例如其用户接口主体103的表面或特征)用作清洁装置100的参考结构。当内窥镜1相对于参考结构在清洁装置100上处于该完全安置位置时,内窥镜的远端部分25从长形主体102的远端部分106中的开口104内突出已知的、可预测的量。通过这样的界面布置和尺寸公差,可以实现内窥镜1和清洁装置100之间的高水平尺寸精度。如下面更详细地讨论的,这样的尺寸精度有利于由清洁装置100提供的清洁性能。
48.如上参考图1所述,内窥镜1的远端部分25承载成像元件20(例如,透镜)。成像元件20暴露在内窥镜1的延伸部分10的远端部分25处,并且与远端部分25大致上齐平或限定远端部分25处的端面。内窥镜1的远端部分25暴露在远端106中的开口104处。由于内窥镜1在清洁装置100上的安置放置,成像元件20相对于清洁装置100的参考结构处于已知和可预测的位置。因此,对于设计用于特定清洁装置的内窥镜,清洁装置100的部件可以类似地相对于内窥镜1的结构处于已知和可预测的位置,从而提供清洁装置100的部件的精确放置和构型,以实现所需和可预测的清洁性能水平。
49.现在参考图3-6,长形主体102和用户接口主体103共同限定了清洁装置的底座。底座用作平台,内窥镜1可以在底座上以可预测的安置位置安装。本文公开的是,底座可以是提供机器人辅助手术的机器人的底座,或者可以适于操作地与这种机器人的匹配安装部分连接。例如,长形主体102和/或用户接口主体103可以是机器人的臂或其他结构的,或者适于操作地与机器人臂的仪器安装部分连接。
50.底座的长形主体102可以是具有中央通道110(如图3所示)的管,中央通道110具有圆形或大致圆形的截面形状。中央通道110的尺寸和轮廓适于通过将延伸部分插入中央通道110,并沿着长形主体102的长度滑动延伸部分10直到内窥镜1位于底座上的安置位置,而使内窥镜1的延伸部分10安置于中央通道110中。用户接口主体103可以包括用于将内窥镜1固定在底座上的安置位置中的保持工具111。可选地,长形构件102可以是非管状结构,例如
骨架结构,其在内窥镜的延伸部分10的离散间隔位置处接合内窥镜的延伸部分10。
51.底座可以包括多个结构元件(structural elements),当内窥镜1安装在底座上的安置位置时,这些结构元件提供内窥镜1的已知和可预测的位置。这些结构元件之一是长形主体102相对于内窥镜1的延伸部分10和底座的长形主体102的外径的有效内径(例如,用于带肋或纹理的内表面)或实际内径(例如,光滑的内壁)。优选地,在长形主体102的外壁和延伸部分10的匹配外壁之间保持紧密配合,以便在长形主体102和延伸部分10之间提供抗流体界面(fluid-resistant interface),并且限制长形主体102的纵向轴线和延伸部分10之间的离轴节距(off-axis pitch)。这些结构元件中的另一个是用户接口主体103上的安置表面112(如图3和图11所示)。安置表面可以是清洁装置100的参考表面,其接合内窥镜1的匹配参考表面35(如图1所示)。用户接口主体103上的安置表面112与内窥镜1的匹配参考表面35的接合用于限定内窥镜1在底座上的可预测的安置方位。
52.清洁装置100包括靠近长形主体102的远端部分106中的开口104的清洁构件114(在图2和图3中示出)。如下面更详细地讨论的,当清洁构件114与内窥镜的成像元件20接触时,清洁构件114用于从成像元件20的表面清洁污染物和碎片。清洁构件114可以固定地附接到联接元件116的远端部分。如图4最佳所示,联接元件116延伸穿过长形主体102内的通道118。优选地,通道118和中央通道110在长形主体102内基本上彼此平行地延伸。在一些实施例中,联接元件116的特征在于长形的小直径结构,长形的小直径结构提供至少有限程度的弯曲性与高扭转刚度的组合。在其他实施例中,联接元件116的特征在于提供给定量的扭转柔度(torsional compliance)的长形的小直径结构。基于这些特征属性,联接元件116的示例包括但不限于实心金属丝、螺旋金属丝、聚合物长丝、复合长丝或类似物。
53.用户接口主体103可以被配置为用于清洁装置100的手柄,用户接口主体103承载清洁构件控制器120。清洁构件控制器120联接在用户接口主体103和清洁构件114之间,用于实现清洁构件114的选择性运动。清洁构件控制器120包括第一清洁构件控制机构122(即,清洁构件运动机构)和第二清洁构件控制机构124(即,清洁构件调节机构)。第一清洁构件控制机构122包括控制主体125(即,第一控制主体125),控制主体125可旋转和可平移地安装在(即,附接到)用户接口主体103上,如图5和图6最佳所示,以及第二清洁构件控制机构124可旋转地安装在第一清洁构件控制机构122上。第一和第二清洁构件控制机构122、124提供各种清洁构件操纵模式。
54.通过这种第一清洁构件控制机构122的运动能力,第一清洁构件控制机构至少提供第一清洁构件操纵模式和第二清洁构件操纵模式。第一清洁构件操纵模式可以包括平移运动,如由联接元件116的平移所提供的,以使清洁构件114在收起位置s(在图7中最佳示出)和使用位置u(在图8中最佳示出)之间移动,即第一清洁构件操纵模式。可以看出,收起位置s和使用位置u是相对于内窥镜1安装在底座上时内窥镜1的成像元件20的位置。使用位置u是清洁元件114超出内窥镜1的终点端的位置。收起位置s是清洁元件114从使用位置u缩回的位置(例如,以使用位置u和收起位置s之间的最大行程距离缩回)。第二清洁构件操纵模式可以包括旋转运动,以在清洁构件114处于使用位置,将清洁构件114移动成与成像元件20接触或移动成不与成像元件20接触(如图6和图8-10中最佳示出),即第二清洁构件操纵模式或如下所述,与使用位置相邻的偏置使用位置。以此方式,第一清洁构件控制机构122的第一清洁构件操纵模式允许对清洁构件114的操纵,以使得在活体内对成像元件20的
清洁与利用成像元件20的活体内手术腔可视化能够合作进行。
55.如上所述,清洁装置114和内窥镜1共同配置成使得成像元件20相对于清洁装置100的底座的参考结构处于已知和可预测的位置。因此,由于内窥镜1和清洁装置100的尺寸特性,清洁构件114相对于成像元件20处于已知和可预测的位置。在至少一个方面,清洁构件114相对于成像元件20的这种已知和可预测的位置可以用清洁构件114的参考部分(例如,清洁构件114的边缘部分)与成像元件20的暴露表面之间的轴向距离来表征。该轴向距离是清洁装置的设计参数,当清洁构件114处于使用位置u时,在实施第二清洁构件操纵模式期间,该设计参数使得清洁构件114能够响应于清洁构件114被移动成接触(例如,擦过)成像元件20的暴露表面,而从成像元件20的暴露表面移除(即,清洁)碎片和污染物。
56.可能出现一些情况影响清洁构件114相对于成像元件20的位置,影响达到了可能损害成像元件20的期望清洁度的程度。一种这样的情况是,清洁装置114和/或内窥镜1的尺寸公差导致尺寸堆叠,该尺寸堆叠影响清洁构件114的参考部分和成像元件20的暴露表面之间的轴向距离,影响达到了不利地影响清洁性能的程度。例如,内窥镜1的延伸部分10可能具有在其公差范围的下端处的长度,而内窥镜1的匹配参考表面35可能在其公差范围的上端处。在这种情况下,清洁构件114的参考部分和成像元件20的暴露表面之间的轴向距离可能变得大于提供可接受的清洁性能所需的距离。另一种这样的情况是,用户使清洁构件114在成像元件20上移动的终点用户技术(end user technique)(例如,速率、节奏和/或旋转方向)可能会不利地影响清洁性能。
57.有利地,根据本发明的一个或更多个实施例配置的清洁装置包括至少一个备用方案,用于在可能影响清洁构件114相对于成像元件20的位置的情况中减轻损害成像元件20的期望清洁度的程度。为此,第二清洁构件控制机构124提供相应的清洁构件操纵模式(即,第三清洁构件操纵模式),用于选择性地改变清洁构件114的参考部分和成像元件20的暴露表面之间的轴向距离。
58.如图2、图3、图5和图6所示,第二清洁构件控制机构124包括可旋转地(即,可移动地)附接到第一清洁构件控制机构122的控制主体126(即,第二控制主体)。通过第二控制主体126在给定方向上的旋转,清洁构件114的参考部分和成像元件20的暴露表面之间的轴向距离发生相应的变化(例如,顺时针旋转提供变小的距离,而逆时针旋转提供变大的距离,或者反之亦然)。以此方式,用户终点能够改变清洁构件114与成像元件20的暴露表面之间的轴向距离,以影响清洁构件在与成像元件20接触时施加的负载,从而影响成像元件的清洁性能。
59.现在参考图11,描述了第一清洁构件控制机构122和第二清洁构件控制机构124的具体实施方式的方面。第一控制主体125包括用户接口部分128和连接到用户接口部分128的安装部分130。安装部分130可平移和可旋转地附接到用户接口主体103的匹配部分。例如,安装部分130可以包括圆柱形延伸部分131,该圆柱形延伸部分131安置于用户接口主体103的匹配通道133中,以允许第一清洁构件控制机构122在延伸位置e(图5)和缩回位置r(图6)之间相对于用户接口主体103轴向平移,用于在收起位置s和使用位置u之间相应地移动清洁构件114,并且相对于用户接口主体103可旋转地平移,用于将清洁构件114相应地移动成与内窥镜1的成像元件20接触或相应地移动成不与内窥镜1的成像元件20接触。安装部分130的尺寸和用户接口主体103的匹配通道的尺寸可以共同限定清洁构件控制机构122表
现出的平移运动量。
60.仍然参考图11,第二控制主体126包括用户接口部分132和连接到用户接口部分132的安装部分134。安装部分134可旋转地(即,可移动地)附接到第一清洁构件控制机构122(例如,控制主体125)的用户接口部分132的匹配部分,用于使第二控制主体126能够相对于第一控制主体125旋转,同时抑制第二控制主体126和第一控制主体125之间不受限制的轴向平移(即,能够旋转、抑制平移的接口)。第二清洁构件控制机构124的联接元件接合结构136设置在第一控制主体125上,以允许联接元件接合结构136相对于第一清洁构件控制机构122轴向平移,并抑制联接元件接合结构136和第一清洁构件控制机构122之间的不受限制的旋转运动(即,抑制旋转、允许平移的接口)。例如,联接元件接合结构136可以具有长方形侧向形状(例如,矩形),并且位于第一控制主体125的具有长方形侧向形状的匹配长形腔内,从而允许联接元件接合结构136的相对轴向平移并抑制其不受限制的相对旋转运动。
61.联接元件接合结构136的延伸部分138(例如,互锁接口结构的第一结构元件)螺纹接合在第二控制主体126的匹配中央通道140(例如,互锁接口结构的第二结构元件)内。这种螺纹接合是互锁接合的一个示例,其中轴向运动依赖于旋转运动。第一清洁构件控制机构122的安装部分130具有纵向延伸穿过其中的联接元件通道142,并且联接元件接合结构136具有至少部分纵向延伸穿过其中的联接元件通道144。第一清洁构件控制机构122的安装部分130和联接元件接合结构136共同配置为使得联接元件通道142、144纵向对齐。联接元件116的近端部分穿过第一清洁构件控制机构122的联接元件通道142延伸到联接元件接合结构136的联接元件通道144中。联接元件接合结构136包括固定结构146(例如,螺纹固定螺钉),用于将联接元件116固定在相对于联接元件接合结构136的固定位置。
62.如上所述,通过联接元件接合结构136的延伸部分138与第二控制主体126之间的螺纹接合,第二控制主体126相对于第一清洁构件控制机构122的旋转引起联接元件接合结构136相对于第一清洁构件控制机构122的轴向平移,因此,提供清洁元件114的相应轴向位移,从而调节清洁构件114的参考部分和成像元件20的暴露表面之间的轴向距离(例如,顺时针旋转提供变小的距离,而逆时针旋转提供变大的距离,或者反之亦然)。
63.用户可以以任何数量的方式使用由第二清洁构件控制机构124提供的清洁构件调节能力。例如,在外科手术之前,用户可以使用这种清洁构件调节能力来设置清洁元件114和成像元件之间的初始接触程度。在将内窥镜安装在清洁装置的底座上之后,用户可以调节清洁构件114和成像元件20之间的轴向距离,使得当清洁构件114经过成像元件20的暴露表面时,清洁构件114与成像元件20的暴露表面之间没有接触。使用由第二清洁构件控制机构124提供的清洁构件调节能力,则用户可以使清洁构件114与成像元件20第一次接触,然后通过使用清洁构件调节能力向清洁构件施加给定程度的“预加载”。在外科手术过程中还可以利用清洁构件调节能力来进一步调节清洁构件轴向距离(即,使清洁构件114上的接触载荷变大或变小)以影响清洁性能。
64.本发明的一个或更多个实施例可以提供清洁构件偏移功能。图12示出了由图2-11的清洁装置提供的这种清洁构件偏移功能的实施方式。当第一控制主体125以其缩回行程的极限(即,完全回缩)处于缩回位置r(见图2、图3和图6)时,这种清洁构件偏移功能用于使清洁构件114的位置从其使用位置精确偏移。为此,可以在第一清洁构件控制机构122的安
装部分130中设置对应于期望的偏移位置的周向凹槽148。用户接口主体103包括位移控制结构150,该位移控制结构在触觉上并且可选地在听觉上指示第一控制主体125何时已经从缩回位置r平移到由周向凹槽148的位置所限定的位置。凹槽148和位移控制结构之间的侧向距离限定清洁构件114的偏移距离。在一个或更多个实施例中,位移控制结构150包括接触构件151,接触构件151具有被强制偏置成与第一清洁构件控制机构122的安装部分130的外表面接触的表面接合部分。表面接合部分被设定尺寸和/或成形为接合周向凹槽148。
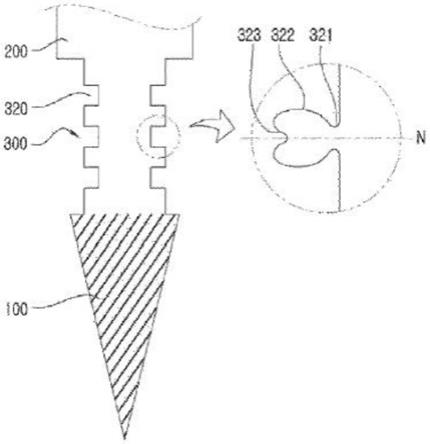
65.现在参考图13-18,讨论了根据本发明的第二实施例配置的活体内内窥镜清洁装置的各个方面,该装置被指定为清洁装置200。除了清洁装置200的以下区别方面之外,清洁装置200大致上可以具有与上面参考图2-12讨论的清洁装置100相同的配置,可以与市售的内窥镜连接,并且旨在以与上面描述的清洁装置100相同的方式使用。然而,如将看到的,清洁装置200包括在功能和结构上不同于清洁装置100的清洁构件控制器结构。第一实施例和第二实施例中相似的元件由相似的附图标记和/或名称表示(例如,用户接口主体103和用户接口主体203)。
66.清洁装置200的用户接口主体203承载清洁构件控制器220。下面的描述将描述清洁构件控制器220的操作,该清洁构件控制器220提供结构授权的清洁构件运动布置。相比之下,上面参考图2-12讨论的清洁装置100的清洁构件控制器120利用了用户授权的清洁构件移动布置。
67.清洁构件控制器220联接在用户接口主体203和清洁装置200的清洁构件之间,用于实现清洁构件的选择性运动。(即,在功能和/或结构上类似于清洁装置100的清洁构件控制器120联接到其清洁构件114。)清洁构件控制器220包括第一清洁构件控制机构222和第二清洁构件控制机构224。第一清洁构件控制机构222和第二清洁构件控制机构224各自包括各自的控制主体225、226(即,第一控制主体225和第二控制主体226),其可旋转地附接到用户接口主体203,如图13和图14最佳所示。第一清洁构件控制机构222利用其旋转运动,同步地使清洁构件在收起位置s(见图7)和使用位置u(见图8)之间移动,并移动成与内窥镜1的成像元件接触以及移动成不与内窥镜1的成像元件接触(见图7-9)。因此,第一清洁构件控制机构222组合前面提到的第一和第二清洁构件操纵模式。第二清洁构件控制机构224利用其旋转运动来提供清洁构件操纵模式(即,先前提到的第三清洁构件操纵模式),用于当清洁构件处于使用位置时调节清洁构件与内窥镜的成像元件之间的轴向距离。以此方式,第一清洁构件控制机构222的第一清洁构件操纵模式允许对清洁构件的操纵,以使得在活体内对内窥镜的成像元件的清洁与利用成像元件的活体内手术腔可视化能够合作进行。
68.参考图14和图15,第一清洁构件控制机构222包括第一控制主体225、凸轮体227和联接元件接合结构236,并且第二清洁构件控制机构222包括第二控制主体226。第一控制主体225包括用户接口部分228和连接到其用户接口部分228的安装部分230。第二控制主体226包括用户接口部分232和连接到其用户接口部分232的安装部分234。优选地,如图所示,第一控制主体225与第二控制主体226呈嵌套布置。
69.联接元件216的近端部分进入联接元件接合结构236的联接元件通道242。联接元件接合结构236包括固定结构246(例如,螺纹固定螺钉),用于将联接元件216固定在相对于联接元件接合结构236的固定位置。因此,如下面更详细地讨论的,联接元件接合结构236的轴向位移引起联接元件216和附接到联接元件216的远端部分的清洁构件的相应轴向位移。
70.联接元件接合结构236可平移和可旋转地安置于凸轮体227的中央通道229内。第二清洁构件控制机构224的安装部分234(例如,互锁接口结构的第一结构元件)设置在凸轮体227的中央通道229内,并与凸轮体227(例如,互锁接口结构的第二结构元件)螺纹接合,由此第二控制主体226的旋转引起凸轮体227相对于第二清洁构件控制机构224的安装部分234的轴向位移。凸轮体227安装在用户接口主体203上,并与用户接口主体203共同配置,以允许凸轮体227相对于用户接口主体203轴向平移,并抑制两者之间的不受限制的旋转运动(即,允许平移、抑制旋转的接口)。第二清洁构件控制机构224的安装部分234与用户接口壳体203接合,以允许第二控制主体226相对于用户接口壳体203的旋转运动,同时抑制两者之间的不受限制的轴向位移(即,允许旋转、抑制平移的接口)。第一清洁构件控制机构222的安装部分230可旋转地设置在凸轮体227的中央通道229内,延伸穿过第二控制主体226的中央通道231。
71.联接元件接合结构236包括接合在第一控制主体225的中央通道240内的延伸部分238。延伸部分238的匹配表面和中央通道240共同配置成允许延伸部分238和第一控制主体225之间的相对轴向平移,同时抑制它们之间的相对旋转(即,允许平移、抑制旋转的接口)。例如,延伸部分238可以具有非圆形截面轮廓(例如,正方形或星形截面轮廓),并且中央通道240可以相应地具有非圆形截面轮廓。弹性构件243(例如,弹簧)接合在凸轮体227和联接元件接合结构236之间,用于将联接元件接合结构236的延伸部分朝向第一清洁构件控制机构222的中央通道240偏置。
72.第一清洁构件控制机构222的安装部分230包括行程限制元件245,行程限制元件245被固定地附接到安装部分230上并接合第二清洁构件控制机构224的安装部分234的一个或更多个表面。例如,行程限制元件245可以,如图所示,邻接第二清洁构件控制机构224的安装部分234的端面,或者可以接合安装部分234的中间位置处的凹槽。行程限制元件245与第二清洁构件控制机构224的一个或更多个表面的这种接合将第一清洁构件控制机构222固定在相对于第二清洁构件控制机构224的轴向位置,同时允许它们之间的旋转运动。第一清洁构件控制机构222和第二清洁构件控制机构224的这种固定以及第二清洁构件控制机构224的安装部分234与凸轮体227的螺纹接合,在第二控制主体226旋转时,提供了凸轮体227相对于第一清洁构件控制机构222和第二清洁构件控制机构224的轴向位移(例如,顺时针旋转提供沿一个方向的轴向运动,而逆时针旋转提供沿相反方向的轴向运动)。
73.现在参考图15-18,凸轮体227包括凸轮传动结构247(即,凸轮表面提供的结构),该凸轮传动结构根据第一控制主体225的角度位置限定了清洁构件的轴向位置。在一个或更多个实施例中,凸轮传动结构247可以是槽(即,包括通道和凹入部分),并且该槽可以完全延伸穿过限定中央通道229的壁。在一个或更多个其他实施例中,凸轮传动结构247的功能可以由轨道或其他结构提供,轨道或其他结构包括轮廓表面,轮廓表面根据清洁构件控制器的控制部分的角度位置限定清洁构件的轴向位置。运动控制构件249(例如,销)具有其第一端部部分和其第二端部部分,第一端部部分固定地附接到联接元件接合结构236,第二端部部分可滑动地接合凸轮传动结构247(例如,槽内的销)。凸轮传动结构247具有至少部分地限定运动控制构件249的行进路径的轮廓。因此,在使用中,第一控制主体225的旋转引起运动控制构件249沿着这样的路径行进,并因此提供联接元件接合结构236的相应轴向运动,清洁构件通过联接元件214附接到该联接元件接合结构236。
74.凸轮体226、联接元件接合结构236和运动控制构件249共同限定运动控制设备。凸轮体227包括运动控制结构,运动控制结构根据第一控制主体225的角度位置限定了联接元件接合结构236的轴向位置。该运动控制设备提供清洁构件的旋转和轴向运动,并由此清洁构件经由联接元件216附接到其上。
75.在一个或更多个实施例中,如图15-18所示,凸轮体227的凸轮传动结构247是周向的,使得它围绕凸轮传动结构247的整个圆周延伸。凸轮传动结构247具有多个凸轮段。这些凸轮段中的第一个凸轮段(第一凸轮段252)可以是停留段,在该停留段期间,清洁构件旋转,同时相对于清洁装置200的长形主体202(图13)的远端部分处于收起位置。这些凸轮段中的第二个凸轮段(第二凸轮段254)可以是部署段,在该部署段期间,清洁构件从收起位置部署到使用位置(即,轴向位移远离长形主体202的远端部分)。这些凸轮段中的第三个凸轮段(第三凸轮段256)可以是接触段,在该接触段期间,清洁构件旋转成与内窥镜的成像元件接触以及旋转成不与内窥镜的成像元件接触,同时清洁构件保持完全或部分轴向地远离长形主体202的远端部分,轴向位移的距离至少部分由第二凸轮段254和第三凸轮段256限定。例如,第三凸轮段256可以具有斜面,用于使清洁构件呈现相应的轴向位移。这些凸轮段中的第四个凸轮段(第四凸轮段258)可以是缩回段,在该缩回段期间清洁构件返回到收起位置。弹性构件提供偏置力,用于将联接元件接合结构236推向完全缩回位置,并因此将清洁构件推向收起位置。
76.运动控制构件249通过这些凸轮段的运动限定了清洁循环的通用实例。清洁循环260的下一个实例在第一控制主体225旋转时启动。缩回段258还可以用作防旋转工具,例如,缩回段258和停留段252具有陡峭的垂直轮廓(例如,它们之间的90度角),以防止运动控制构件249在非预期的旋转方向上移动。
77.在本发明的一个或更多个其他实施例中,可以省略第二清洁构件控制机构224。第二清洁构件控制机构224的省略使得第一控制主体225可旋转地安装在底座上,并且使得第一控制主体225能够以抑制第一控制主体225相对于联接元件接合结构236的旋转运动和轴向运动的方式附接到联接元件接合结构236。这样的实施例提供了上述组合的第一和第二控制构件操纵模式,同时省略了上述第三控制构件操纵模式。
78.尽管已经参考几个示例性实施例描述了本发明,但应当理解,已经使用的词语是描述和说明的词语,而不是限制的词语。可以在所附权利要求书的范围内做出改变,如目前所述和经修改的,而不偏离本发明在其所有方面的范围和精神。尽管已经参考特定的装置、材料和实施例描述了本发明,但本发明并不打算局限于所公开的细节;相反,本发明扩展到诸如在所附权利要求书范围内的所有功能等同的技术、结构、方法和用途。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。