1.本发明涉及一种用于自动配准对象的配准方法。本发明还涉及一种导航系统,其配置用于执行这种配准方法。
背景技术:
2.为了帮助外科医生在外科手术中使用医疗器械,已知可以跟踪医疗器械在患者体内的位置,并在例如监视器上在患者模型的截面图像中显示器材的位置。
3.为此,导航系统通常包括数据处理单元、监视器、许多定位元件和位置检测系统。所述位置检测系统可以是,例如,光学的、基于超声波的或电磁位置检测系统。通常,位置检测系统配置成用于确定定位元件的位置和取向。
4.作为示例,已知电磁位置检测系统具有用于产生交变电磁场的场发生器。与电磁位置检测系统一起使用的医疗器械配备了定位元件,该定位元件通常包括一个或多个线圈。
5.当暴露于交变电磁场时,取决于相应线圈在交变电磁场中的位置和取向,在定位元件的线圈中感应出电压。通过分析表示感应电压的抽头电压信号,可以确定定位元件的位置和取向。通常,医疗器械的定位元件的位置和取向是相对于参考定位元件的位置和取向确定的,该参考定位元件同样可以包含线圈并且相对于患者保持固定。
6.为了能够在导航系统的监视器上在患者模型的截面图像中显示器械位置,一开始,需要配准该模型。通常,患者模型是从术前通过断层扫描获得的患者的二维,三维或四维图像生成的形貌图像,例如,通过计算机断层扫描(ct),磁共振成像(mri)或c臂透视成像。最初,模型是根据相应二维、三维甚至四维图像坐标系中的坐标来定义的。
7.配准是指获得患者在真实空间(有时也称为患者空间)中的位置和取向与根据相应二维、三维或四维图像的坐标系中的坐标(用于生成模型)定义的模型之间的空间关系。特别地,为了获得患者和模型之间的空间关系,建立了定义如何将例如患者空间中的坐标与患者模型的模型点的相应坐标相关联的变换函数,反之亦然。
8.为了在配准方法的范围内建立变换函数,已知各种方法,例如基于表面的配准和基于点的配准。
9.在基于点的配准中,布置在患者上的标记或用作基准点的解剖标志分别用于在患者处和从患者的二维、三维或四维图像生成的患者模型处建立参考坐标系。
10.可以执行基于点的配准,例如,通过使用由位置检测系统跟踪的指针仪器或感测仪器触摸这些标记或标志。通过用被跟踪仪器触摸标记或标志,识别患者真实表面上的点,并且用位置检测系统确定的定位元件的对应位置值与代表相同标记或标志位置的模型的各个模型点相关联。根据标记或标志的位置,在模型和患者处建立参考坐标系,并根据参考坐标系确定所需的变换函数。
11.如果将模型配准至患者,则可以在模型的截面图像中显示医疗器械的位置,以帮助外科医生导航医疗器械。为了在模型的截面图像中显示医疗器械的位置,将确定的医疗
器械的定位元件的位置和取向转换为患者模型的模型点的相应坐标。
技术实现要素:
12.目的是提供一种用于自动配准对象的改进的配准方法,并提供一种配置用于执行自动配准方法的改进的导航系统。
13.关于配准方法,该目的通过自动配准对象的配准方法来实现。配准方法包括以下步骤:
[0014]-提供术前获得的对象模型,
[0015]-提供至少一个标记载体,该标记载体具有多个可透视检测标记和固定在其上的至少一个标记定位元件,其中所述至少一个标记定位元件配置为提供表示标记定位元件在交变电磁场中的位置和方向的传感器信号,并且其中至少一个标记定位元件和多个标记中的至少一个标记之间的相对距离和取向是已知的,
[0016]-在对象的外表面上设置至少一个标记载体,
[0017]-生成至少一个标记载体的至少一个透视图像,该标记载体与对象的至少一个区段一起布置在外表面上,使得至少一个标记载体的两个标记与对象的至少一个区段一起在所生成的透视图像中是可见的,
[0018]-确定布置的标记载体的至少一个标记定位元件在电磁场中的位置和取向,以及
[0019]-将生成的透视图像的图像点与术前获得的模型的模型点相关联。
[0020]
可以使用所确定的至少一个标记定位元件的位置和取向以及至少一个标记定位元件和多个标记中的至少一个标记之间的已知的相对距离和取向执行所生成的透视图像的图像与术前获得的模型的模型点的相关联。
[0021]
作为使用至少一个标记定位元件和多个标记中的至少一个标记之间的已知相对距离和取向的补充或替代,可以使用多个标记中的另一标记与相对于至少一个标记定位元件具有已知相对距离和取向的至少一个标记之间的已知空间关系来执行所生成的透视图像的图像点与所述术前获得的模型的模型点的相关联。
[0022]
在这些步骤中,“生成至少一个标记载体的至少一个透视图像”的步骤可以在“确定至少一个标记定位元件的位置和取向”的步骤之前或之后进行,或者优选地与其同时执行。
[0023]
使用根据本发明的配准方法,可以自动配准对象,而无需用指针仪器或感测仪器接触标记或标志。
[0024]
特别地,利用根据本发明的配准方法,可以配准包括彼此相对移动的多个元件的对象,并且即使在导航过程期间对象的元件相对移动,也可以在导航过程的持续时间内保持配准精度。
[0025]
当对象的元件相对于彼此移动时,为了在导航过程的持续时间内保持配准精度,通过根据本发明的配准方法实现了对象被分段配准,即逐段配准。
[0026]
分段配准是指将对象划分为多个区段,并为每个对象区段建立单独的变换函数。优选地,每个区段与布置在相应区段上的相应标记载体相关联。可以将多个标记载体布置在对象的各个区段上。标记载体也可以逐段移位以配准对象。
[0027]
区段的大小可以根据各种标准来定义。在对象包含多个元件的情况下,每个对象
区段都可以包含对象元件中的一个不同的元件,即每个区段一个元件。一个区段也可以包括对象的两个或更多个元件。在一个区段包括两个或更多个元件的情况下,可以选择区段的大小,使得由区段包括的两个或更多个元件之间的相对移动对于配准精度来说是可忽略的。分段方式也可能已经由对象本身的形状提出,例如,如果对象是患者的脊柱,则一个区段可以包括一个或多个椎骨。
[0028]
在根据本发明的配准方法中,一开始,提供标记载体和术前获得的对象模型。
[0029]
术前获得的模型可以从记录的图像数据中生成,例如,通过断层扫描。模型可以是对象的2d或3d或4d模型。然而,优选地,该模型是从配准到3d模型的2d透视图像生成的3d模型。最初,模型是通过生成模型的图像数据的坐标来定义的,例如,通过患者的断层扫描图像的坐标。
[0030]
在根据本发明的配准方法中使用的至少一种标记载体的特征在于它具有多个可透视检测的标记和固定在其上的至少一个标记定位元件,其中至少一个标记定位元件和多个标记中的至少一个标记之间的相对距离和取向是已知的。
[0031]
所述至少一个标记定位元件与所述多个标记中的至少一个标记之间的已知相对距离和取向是指所述至少一个标记定位元件与至少一个标记之间的相对距离和取向是固定的,即相对于彼此是恒定的,并且在配准对象之前可用。
[0032]
特别地,已知的空间关系是标记载体的固有几何特性,因此在配准之前可用。已知的空间关系以固定几何数据的形式作为导航系统和配准方法的输入提供。优选地,固定几何数据通过表示至少一个标记定位元件和多个标记中的至少一个标记之间的空间关系的常数向量或矩阵来提供。例如,几何数据可以形成定义至少一个标记定位元件和多个标记中的至少一个标记之间在标记定位元件坐标系中的空间关系的向量。
[0033]
在标记定位元件和几个标记之间的空间关系和/或几个标记之间的空间关系已知的情况下,已知的空间关系可以以几何数据集的形式作为导航系统和配准方法的输入提供,几何数据集包括相应的几何数据。
[0034]
可透视检测标记可以是例如分布在标记载体表面上的金板。通常,标记是可透视检测的,因为它们由比标记载体本身或多或少不透辐射的材料制成的。然而,优选地,可透视检测标记配置为它们可以用作生成的透视图像中的基准点。可透视检测标记例如可以具有零维或也可以具有一维几何形状。
[0035]
附着到标记载体的标记定位元件可以布置在可透视检测标记的位置,即,相称地。标记定位元件也可以布置在与布置可透视检测标记的位置不同的位置处。然而,要求至少一个标记定位元件关于多个可透视检测标记中的至少一个具有已知的相对距离和取向。至少一个标记定位元件和多个可透视检测标记中的至少一个之间的这种已知空间关系允许在位置检测系统的坐标系中确定至少具有已知空间关系的标记的位置(反之亦然)以及标记定位元件在生成的透视图像的坐标系中的位置。
[0036]
标记定位元件配置用于捕获电磁场,例如交变电磁场,并且用于提供表示标记定位元件在电磁场中的位置和取向的传感器信号。所提供的传感器信号可以通过电缆或无线传输到位置检测系统,该位置检测系统配置为通过分析接收到的传感器信号来确定标记定位元件的位置和取向。
[0037]
优选地,标记定位元件包括一个或多个传感器线圈。标记定位元件优选地配置为
捕获六个自由度(dof)。这样的六自由度标记定位元件可以实施成它包括至少两个传感器线圈,它们相对彼此以一定角度布置,例如,彼此正交。如果标记定位元件包括一个或多个线圈,则可以抽头表示标记定位元件在交变电磁场中的位置和取向的电压信号,并将其传输到位置检测系统。
[0038]
具有定位元件的标记载体也可以用作参考定位元件,用于在由位置检测系统的场发生器产生的电磁场中相对于标记载体导航同样配备有定位元件的医疗器械。具有定位元件的标记载体也可以用作参考定位元件,用于跟踪各个另外的标记载体的一个或多个另外的标记定位元件相对于用作参考定位元件的标记载体的定位元件的位置的位置。
[0039]
对于根据本发明的配准方法,标记载体布置在对象的外表面上。优选地,标记载体在导航过程期间停留在对象的外表面上,使得可以在不移动标记载体本身的情况下执行多次配准。也可能的是,对于每次配准,标记载体都被布置在对象的外表面上并随后被移除。变换函数可以在导航过程中重复确定,并且可以随着每个新执行的配准而更新。通过重复更新已建立的变换函数,即使对象的元件在导航过程中相对于彼此移动,也可以保持准确的配准。
[0040]
要配准的对象可以包括可以相对移动的多个元件。例如,具有多个元件的对象可以是患者的脊柱,而这些元件是脊柱的椎骨。如果对象是脊柱,则标记载体可以直接布置在暴露的脊椎上或患者的皮肤上,例如,在患者脊柱上方一定距离处。将标记载体布置在对象的外表面上也可以指标记载体布置在患者皮肤上与实际感兴趣结构(例如患者脊柱)相距一定距离的情况。优选地,标记载体布置在对象的外表面上,使得在生成的透视图像中可见的对象的投影中,标记载体的至少两个可透视检测标记与感兴趣结构(例如患者脊柱的三到四个椎骨)一起可见。
[0041]
在布置在对象的外表面上的至少一个标记载体中,生成至少一个透视图像,使得在透视图像中标记载体的至少两个标记与对象的至少一个区段一起可见。透视图像包括用于生成透视图像的图像点,这些图像点是从例如使用具有x射线源和x射线检测器的x射线装置记录的透视图像数据重建的。
[0042]
区段优选地是指对象的外表面的有限区域。以对象是脊椎为例,该区段指的是例如脊柱的椎骨。优选地,在生成的透视图像中可以看到三到四个椎骨,其中至少一个椎骨上布置有标记载体。脊柱区段也可包括多于一个椎骨,例如两个、三个或四个椎骨。例如,可以选择将要配准的对象细分为区段,使得每个区段包括对象元件中的不同元件,或者使得相应区段所包括的两个或更多个元件的相对移动相对于配准精度可以忽略不计。有利地,利用根据本发明的自动配准方法,可以检测对象的两个或更多个区段之间的相对运动。
[0043]
区段的面积可以大于被标记载体覆盖的外表面的部分。
[0044]
由于标记载体包括至少一个标记定位元件,该标记定位元件配置为提供表示标记定位元件的位置和取向的传感器信号,因此可以确定至少一个标记定位元件的位置和取向,例如,通过位置检测系统,其配置为分析所提供的传感器信号。通常,位置检测系统配置为确定至少一个标记定位元件在位置检测系统的坐标系中的位置和取向。
[0045]
可以通过确定的至少一个标记定位元件的位置和取向来计算布置在对象的外表面上的标记载体的位置和取向。通过将标记载体布置在对象的外表面上,可以确定标记定位元件的位置和取向,其对应于真实空间中对象外表面上的点,例如,病人空间。这允许在
对象处建立参考坐标系,例如,通过变换位置检测系统的坐标系,使得其原点是对象表面上与标记载体的标记定位元素具有已知空间关系的那个点。
[0046]
由于至少一个标记定位元件关于标记载体的多个标记中的至少一个标记具有已知的相对距离和取向,因此可以计算具有已知空间关系的该标记在位置检测系统的坐标系统中和在真实空间中(即相对于对象外表面上的点)的坐标。可透视检测标记可用作人工标志,在传统配准方法中,该标志将被跟踪指针仪器或感测仪器触摸。通过与对象真实表面上的点对应的标记定位元素的确定位置,可以在对象处建立参考坐标系。此外,为了在对象处建立参考坐标系,可以使用关于标记定位元件具有已知空间关系的至少一个可透视检测标记的已知空间关系。
[0047]
为了找到变换函数,还需要在术前获得的模型上建立参考坐标系。
[0048]
在根据本发明的配准方法中,在模型处建立参考坐标系是通过生成标记载体连同对象的至少一个区段的透视图像来实现的。在所生成的透视图像中,至少两个可透视检测标记是可见的,由于标记载体的至少一个标记与至少一个标记定位元件之间的已知空间关系,可透视检测标记可以用对象的真实空间中的坐标来表示。通过将透视图像的图像点(例如,表示解剖标志)与术前获得的模型的各个模型点相关联,可以在术前获得的模型处建立参考坐标系,并找到将模型点转换为对象真实空间中的坐标的变换函数,反之亦然。在进行配准之后,相对于标记载体导航的被跟踪医疗器械的位置可以显示在监视器上可视化的术前获得的模型的截面图像中。
[0049]
根据本发明的配准方法可以在导航过程的持续时间内重复几次,从而可以更新配准并保持准确。
[0050]
使用根据本发明的配准方法,可以在导航过程期间多次配准对象的多个单独区段,特别是其上布置有标记载体的该对象的区段。有利地,对于每次执行的配准,根据配准时对象的实际形状建立变换函数。可以根据例如超过预定阈值的对象元件之间的相对移动来调整执行对象配准的频率。在对医疗器械进行逐段导航时,各区段的相应变换函数可用于准确显示医疗器械在术前获得的对象模型的截面图像中的位置。
[0051]
在下文中,描述了根据本发明的配准方法的优选变体。
[0052]
优选地,模型点是术前获得的模型的模型表面的点,其中模型表面对应于对象的外表面。模型表面可以是对象的形貌图像。模型点以及因此术前获得的模型可以从通过断层扫描获得的二维、三维或四维图像生成。
[0053]
在根据本发明的自动配准方法的变体中,布置在对象外表面上的标记载体是柔性的,即,它可以使其形状适应外表面的形貌。柔性标记载体可以例如是带或具有带的形状。优选地,可透视检测的标记固定在柔性标记物载体上的固定位置处。柔性标记载体可以具有不能被拉伸的刚度,从而保持固定在柔性标记载体上的标记的相对位置。
[0054]
在这种使用柔性标记载体的配准方法的变体中,
[0055]-柔性标记载体布置在对象的外表面上,
[0056]-多个标记以这样的方式固定在所述标记载体上,使得三个标记的相应组均形成可以与生成的透视图像中由其他标记组形成的图案区分开来的图案,以及
[0057]-对象的至少两个区段在至少一个生成的透视图像中是可识别的,因为每个区段被分配给由所述标记形成的不同图案。
[0058]
柔性标记载体的特征在于,可透视检测标记布置成使得至少三个标记的相应组各自形成在柔性标记载体上唯一的图案。例如,如果一组包括形成三角形的三个标记,则该三角形可以与由标记的相应其他组形成的其他图案区分开来。
[0059]
每个标记图案可以被分配给或可以用于定义或识别对象的几个区段中的不同区段。由于多个可区分的图案,柔性标记载体可以被解释为拼接在一起的几个单独的标记载体,每个单独的标记载体具有单独的标记图案。
[0060]
当生成柔性标记载体的透视使得对象的至少两个区段可通过相应相关联的标记图案来识别时,可以至少在这两个区段内重建对象的形貌。由于分别与每个区段相关联的标记图案与区段一起在生成的透视图像中可见,因此可以实现对象的形貌重建。由于标记载体是柔性的,因此每个图案都可以以对应于对象外表面形貌的变形方式可见。根据图案的变形和在生成的透视图像中可见的各个图案与区段之间的空间关系,可以通过计算重建外表面的形貌。
[0061]
生成的形貌的标志,特别是表示这些标志的透视图像的图像点,可以分配给术前获得的模型的相应模型点,以便在根据本发明的自动配准方法的范围内找到变换函数。
[0062]
在根据本发明的配准方法的另一变体中,多个标记载体,即,至少两个标记载体同时布置在对象的外表面上。所使用的标记载体可以相同地配置或可以不同地配置。优选地,使用的标记载体是刚性的,即非柔性的。
[0063]
在该变体中,多个标记载体同时布置在对象的外表面上,
[0064]-至少两个标记载体同时布置在对象的外表面上,
[0065]-至少一个透视图像由对象的至少两个区段生成,使得对于每个区段,布置的标记载体的至少两个标记与相应区段一起在生成的透视图像中可见,并且
[0066]-使用在生成的透视图像中可见的那些标记的位置来确定生成透视图像的区段之间的空间关系。
[0067]
例如,几个标记载体可以沿着脊柱布置,例如直接沿着暴露的脊柱或者在脊柱上方一定距离处的患者皮肤上。由于每个标记载体包括至少一个标记定位元件,每个标记载体的位置和取向可以用位置检测系统独立地跟踪。有利地,标记载体被分类或标记。例如,为了独立跟踪每个标记载体,布置在对象外表面的标记载体可以简单地用数字1、2、3等标记。标记载体可以以不同的图案布置在对象的外表面上,例如,作为集群或沿着一条线。优选地,如果标记布置在对象的外表面的预期会改变其形状的那部分上,即,在对象的包括可以相对于彼此移动的若干元件的部分上。为了分段地配准对象,通过多个标记载体,可以将对象的包括可以相对彼此移动的多个元件的部分划分为多个区段,每个区段包括一个或多个元件,使得对象的每个区段可以单独配准。
[0068]
优选地,如果对象是脊柱,则在生成的透视图像中,三到四个椎骨,例如区段,是可见的。在每个椎骨处或上方,可以布置相应的标记载体,使得每个椎骨可以被单独地配准和跟踪。
[0069]
有利地,由于标记载体同时布置在对象的外表面上,为了生成透视图像,必须仅记录一次透视图像数据,从而可以减少对象的x射线曝光。
[0070]
可以使用标记载体的定位元件之一作为参考定位元件,用于跟踪其他标记载体的位置和/或用于跟踪配备有定位元件的医疗器械相对于该参考定位元件的位置。
[0071]
由于以这样的方式生成透视图像使得至少两个区段并且对于每个区段,分别布置的标记载体的至少两个标记是可见的,因此可以基于分别分配给区段之一的可见标记的位置来确定可见区段之间的空间关系。因为对于每个区段可见的至少两个标记彼此具有已知的空间关系,所以可以实现使用在透视图像中可见的标记的位置来确定区段之间的空间关系。相应区段的标记的已知空间关系可用于确定这些标记与相邻区段的标记之间的空间关系,相邻区段的标记在生成的透视图像中也是可见的。根据所确定的区段的空间关系,可以重建对象的形貌和/或可以检测区段的相对运动。
[0072]
在根据本发明的配准方法的又一变体中,标记载体逐段移位。例如,如果对象是脊柱,则标记载体可以逐个椎骨移位,并且在每个位置生成透视图像。每个生成的透视图像可以用于单独配准相应的区段。也可以在生成所有透视图像后拼接它们,并使用拼接的透视图像来配准对象。
[0073]
在根据本发明的自动配准的变型中,标记载体逐步移位,
[0074]-在连续的步骤中,标记载体布置在对象的外表面上,
[0075]-在连续步骤中的每个步骤中,生成所布置的标记载体连同至少一个区段的透视图像,使得标记载体的至少两个标记连同对象的相应区段在透视图像中可见,和
[0076]-使用在各个透视图像中可见的那些标记的位置来确定生成透视图像的区段之间的空间关系。
[0077]
在该变型中,一个标记载体,例如,布置在对象的第一区段上的标记载体,也可能停留在对象的外表面上,而另一标记载体从逐段移位以用于配准对象。保留在外表面上的标记载体可以用作参考定位元件,用于跟踪另一标记载体的相对位置和/或用于跟踪配备有器械定位元件并且相对于对象导航的医疗器械的相对位置。
[0078]
此外,在标记载体逐步移位的变型中,可以使用在各个透视图像中可见的那些标记的位置来确定生成透视图像的区段之间的空间关系。根据所确定的区段之间的空间关系,可以重建对象的形貌和/或可以检测区段的相对运动。
[0079]
优选地,在本文针对一个或多个区段的每个生成的透视图像描述的自动配准方法中,这些透视图像中的相应一个的图像点与所述术前获得的模型的模型点分段地相关,即逐段相关。因此,可以为每个区段建立单独的变换函数。为了在术前获得的对象模型的截面图像中显示医疗器械的位置,可以根据医疗器械当前所在的区段来选择所应用的变换函数。
[0080]
分段配准对象的优点在于,可以从各个区段的配准中确定配准错误。特别地,可以根据与相应模型点相关的至少两个区段的图像点以及至少两个区段之间的已知空间关系来确定配准误差。这是可能的,因为对于每个区段都建立了单独的变换函数。可以比较使用每个已建立的变换函数的坐标变换的结果以确定配准误差。可以更新或校正变换函数,以纠正确定的配准错误,从而提高每个单独区段的配准精度。
[0081]
本文所述的自动配准方法可以包括以下步骤:
[0082]-在图像显示单元(例如导航系统的监视器)上可视化术前获得的模型,使得根据图像点与模型点的相关性,对齐可视化模型,使得在图像显示单元的所述模型上的观察方向对应于记录用于生成至少一个区段的透视图像的透视图像数据的记录方向。
[0083]
如果可视化模型与透视图像中可见的投影对齐,则用户可以更容易地将生成的透
视图像与在导航过程期间在监视器上可视化的术前获得的模型进行比较。由于可以分析图像点和模型点的坐标的空间关系(例如在已建立的参考坐标系中定义的)并且,因此可以实现模型上的观察方向与生成的透视图像的透视对齐,并相应地调整该模型上的观察方向。根据图像点与模型点的相关联,模型可以在图像显示单元上可视化,使得模型上的观察方向对应于生成的透视图像上的观察方向。
[0084]
本文所述的自动配准方法还可以包括以下步骤:
[0085]-通过确定术前获得的模型的至少一个模型点与生成的透视图像的对应图像点的偏差来检测对象的元件的相对运动。
[0086]
如果对象的元件在初始配准后相对于其他元件或相对于参考定位元件移动,则为对象的区段建立的变换函数可能变得不准确,从而图像点与不代表与图像点相同的对象特征的模型点相关。如果再次执行根据本发明的自动配准,则建立新的变换函数,使得图像点与对应的模型点相关,该模型点与在元件相对于对象移动之前对应于相同图像点的模型点不同。可以计算新的对应模型点到先前对应模型点的偏差,例如参考坐标系中的偏差矢量,并由此可以检测对象的元件的相对运动。例如,可以在手术期间在术中检测脊柱椎骨的相对运动。
[0087]
根据本发明的自动配准方法包括如前所述的“通过确定模型点与对应图像点的偏差来检测对象元件的相对运动”的步骤,还可以包括以下附加步骤:
[0088]-使用确定的偏差分段调整术前获得的对象模型。
[0089]
因此,从通过断层扫描获得的患者的二维、三维或四维图像生成的术前获得的模型可以基于确定的偏差进行调整。如果模型基于确定的偏差进行更新,则用户可以使用表示对象的实际形状的模型,该对象自从在导航过程之前生成术前获得的模型或自从在导航过程期间对模型的上一次适应以来已经改变了它的形状。有利地,由于对每个区段分段执行的配准,可以确定单独的偏差,从而可以分段调整模型。优选地,分段地调整术前获得的模型由导航系统在术中执行,该导航系统配置为执行相应实施的算法。
[0090]
特别地,自动配准方法(其中通过确定模型点与对应图像点的偏差来检测对象的元件的相对运动)可选地还可以包括根据如前所述确定的偏差分段适配术前获得的模型,还可以包括以下步骤:
[0091]-提供具有用于确定在电磁场中的位置和取向的器械定位元件的器械,
[0092]-确定器械定位元件在电磁场中相对于至少一个标记定位元件的位置和取向的位置和取向,
[0093]-在图像显示单元上将对象的适配模型连同所述器械的至少一部分可视化,
[0094]-其中使用至少一个模型点与所生成的透视图像的对应图像点的确定的偏差来调整所述器械在所述模型的可视化中的位置和取向。
[0095]
布置在对象外表面上的至少一个标记载体的标记定位元件可以用作器械的参考定位元件,例如医疗器械,该器械同样配备有器械定位元件。如果将术前获得的模型配准到对象,则可以在术前获得的对象模型中显示器械的至少一部分的位置图标或数字表示,使得用户在相对于对象导航器械时可以在显示的模型上定位自己。
[0096]
由于可以根据确定的模型点与相应图像点的偏差来调整术前获得的模型,因此优选地,同样在调整后的模型中调整器械的位置,以便提供尽可能接近实际导航情况的表示。
为了将器械的位置转换为适配模型的对应模型点的坐标,可以使用确定的偏差,例如偏差向量。如果模型和器材在模型中的位置根据确定的偏差进行调整,则用户可以以精确的方式相对于对象导航器械,并且由于器械在可视化模型中的位置的不准确表示而导致的导航误差可以避免。
[0097]
在自动配准方法中,使用至少一个模型点与所生成的透视图像的对应图像点的确定的偏差来调整模型的可视化中器械的位置和取向,优选地,对在于在生成的透视图像中可见的对象的每个区段,分段地执行在调整模型的可视化中调整器械的位置和取向。由于在根据本发明的自动配准方法的范围内为每个区段建立了可用于在相应一个区段中调整器械的位置和取向的单独配准函数,因此在适配模型的可视化中分段适配器械的位置和取向是可能的。
[0098]
本文所述的自动配准方法可以包括以下步骤:
[0099]-将至少一个参考定位元件布置成与对象具有固定的空间关系,所述至少一个参考定位元件配置为提供表示参考定位元件在电磁场中的位置和取向的参考传感器信号,以及
[0100]-确定至少一个标记定位元件在电磁场中相对于至少一个参考标记定位的位置和取向的位置和取向。
[0101]
参考定位元件,有时也称为患者定位器,可以是导航系统的附加元件。优选地,这种参考定位元件相对于对象固定地布置。参考定位元件可以布置在对象旁边或者可以刚性地附接到对象本身。参考定位元件的位置和取向可以由位置检测系统确定,该位置检测系统配置用于分析提供的参考传感器信号,该参考传感器信号表示参考定位元件在电磁场中的位置和取向。
[0102]
相对于参考定位元件的位置和取向,标记载体的至少一个标记定位元件的位置和取向可以由具有用于产生电磁场例如交变电磁场的场发生器的位置检测系统确定。
[0103]
特别地,如果至少一个参考定位元件布置在对象旁边或附接于对象,则在执行根据本发明的配准方法时,自动配准方法可以包括以下步骤:
[0104]-确定至少一个标记定位元件相对于至少一个参考定位元件在第一时刻和在稍后的另一时刻的位置和取向,以及
[0105]-检测标记定位元件的位置和/或取向相对于至少一个参考定位元件的位置和取向在较早的第一时刻相对于较晚的时刻的变化。
[0106]
可以相对于参考定位元素跟踪标记定位元件的位置和取向。此外,还可以相对于参考定位元件或相对于标记定位元件或相对于它们两者来跟踪配备有器械定位元件的器械的位置和取向。通过检测标记定位元件的位置和/或取向相对于参考定位元件的位置和取向在较早的第一时刻相对于较晚的时刻的变化,可以检测到对象尤其是对象的元件在导航过程中的相对移动。关于已相对于参考定位元件移动的对象或至少一个对象元件的信息可用于触发对象的新自动配准,以更新至少一个建立的变换函数。由于标记载体与对象的相应区段相关联,因此可以检测特定区段相对于例如另一区段或参考定位元件的相对移动。由于可以检测到单个区段的相对运动,因此可以只更新与该特定对象相关的变换函数,而为其他没有检测到相对运动的区段建立的变换函数仍然可以应用。
[0107]
如果根据本发明的自动配准方法用于配准患者的脊柱,则自动配准方法可以指定
为:
[0108]-对象是患者的脊柱,并且脊柱的至少一个区段包括一个或多个椎骨,
[0109]-术前获得的模型是脊柱的至少一部分的模型,
[0110]-至少一个标记载体设置在脊柱上,
[0111]-生成至少包含椎骨的区段的至少一个透视图像,该区段上布置有标记载体,使得标记载体的多个可透视检测标记中的至少两个与至少一个椎骨一起可见,和
[0112]-对于一个或多个椎骨的每个生成的透视图像,这些透视图像中的相应一个的图像点与术前获得的脊柱模型的模型点分段相关。
[0113]
优选地,该区段包括一个或两个椎骨,并且以三到四个椎骨可见的方式生成透视图像。标记载体可以直接布置在暴露的脊柱的一个或多个椎骨上,或者可以布置在患者的外表皮上并且因此在相应的一个或多个椎骨上方一定距离处。
[0114]
在根据本发明的自动配准方法中,其中对象是脊柱,特别优选的是,代表椎骨的透视图像的图像点与术前获得的脊柱模型中相同椎骨的各个模型点相关。椎骨可用作配准脊柱的解剖标志。
[0115]
在根据本发明的对象是脊柱的自动配准方法中,可以沿着脊柱同时布置几个标记载体以自动配准脊柱。自动配准方法(其中几个标记载体沿脊柱同时布置,例如,在脊柱手术期间)可以包括:
[0116]-至少在其上布置有标记载体的椎骨中生成至少一个透视图像,并且
[0117]-对于每个生成的透视图像,代表椎骨的透视图像的图像点与术前获得的脊柱模型中代表相同椎骨的对应模型点相关。
[0118]
通过将表示椎骨上的点的图像点与表示椎骨模型上的同一点的对应模型点相关联,可以单独地配准每个椎骨,即逐个椎骨分段地配准,使得由于每个椎骨的分段配准,可以建立单独的变换函数。作为分段配准脊柱的结果,可以单独跟踪每个椎骨相对于其他脊柱椎骨或相对于参考定位元件的运动。在检测到椎骨的相对运动的情况下,可以通过再次配准相应的椎骨来更新相应的变换函数。
[0119]
通过确定术前获得的脊柱模型的至少一个模型点与所生成的透视图像的对应图像点的偏差,可以检测脊柱或脊柱椎骨的相对运动,例如,在术中。
[0120]
有利地,本文描述的自动配准方法可以在脊柱手术之前进行以计划手术或在脊柱手术期间进行以配准患者的脊柱以帮助外科医生执行手术。
[0121]
例如,可以执行脊柱融合,包括使用布置在椎骨上的至少一个标记载体或使用布置在脊柱上的仅用于术中配准脊柱并在之后移除的至少一个标记载体,来在术前或术中配准脊柱。在脊柱手术过程中,可以多次将至少一个标记载体布置成用于配准并在之后移除,以重复更新一个或多个建立的变换函数。
[0122]
在通过应用根据本发明的自动配准方法配准的脊柱上进行的脊柱融合中,例如,两个或多个椎骨可以通过椎弓根螺钉、板或笼接合。通过脊柱融合,例如可以治疗椎管狭窄、脊椎滑脱、脊椎病、脊椎骨折、椎骨骨折、脊柱肿瘤脊柱侧凸、后支综合征、退行性椎间盘疾病、椎间盘突出症、椎间盘源性疼痛或后凸畸形。
[0123]
如果对象是通过执行根据本发明的配准方法(使用布置在椎骨上的在术中配准脊柱的至少一个标记载体或使用布置在脊柱上的仅用于在术中例如在脊柱手术中配准脊柱
并在之后移除的至少一个标记载体)自动配准的脊柱,则多轴螺钉可以拧入相应的椎骨中,该椎骨上布置有至少一个标记载体。通常,在脊柱手术中,多轴螺钉用于将椎骨连接到杆,例如,用于治疗退行性颈椎病和弯曲。优选地,可以利用位置检测系统来跟踪螺钉的位置,例如,通过在多轴螺钉处或其中布置定位元件。在手术过程中,可以在脊柱模型中显示跟踪的多轴螺钉的位置,以帮助外科医生放置多轴螺钉。
[0124]
特别地,在微创脊柱手术之前或期间,本文描述的自动配准方法可用于配准脊柱。为了作为微创脊柱手术的一部分配准脊柱,可以将至少一个标记载体布置在椎骨上用于术中配准脊柱,或者可以将至少一个标记载体布置在脊柱上仅用于术中配准脊柱并且可以之后移除。
[0125]
通过实施根据本发明的自动配准方法来配准脊柱的微创脊柱手术可以包括颈前路椎间盘切除术、人工椎间盘置换术或全椎间盘置换术、硬膜外粘连松解术、椎板切除术、椎板切开术、斜外侧腰椎椎间融合术(ollif)、经皮椎体成形术,内窥镜椎间盘切除术。可以对已配准的脊柱进行微创脊柱手术,以治疗退行性椎间盘疾病、椎间盘突出、骨折、肿瘤、感染、不稳定和畸形。
[0126]
在需要对脊柱进行骨髓活检的情况下,通过执行如本文所述的自动配准方法来配准脊柱也是有利的。优选地,进行骨髓活检的脊柱被配准,至少一个标记载体布置在椎骨上用于术中配准脊柱,或者至少一个标记载体布置在脊柱上仅用于术中配准脊柱并随后移除。通过骨髓活检,可以对多种疾病进行诊断,包括白血病、多发性骨髓瘤、淋巴瘤、贫血和全血细胞减少症。
[0127]
也可以将jamshidi针插入通过执行如本文所述的自动配准方法配准的脊椎中。jamshidi针是一种带有锥形切割尖端的空心针,可以进行骨髓活检。jamshidi针本身可以连接到位置检测系统,因为它包括器械定位元件。利用位置检测系统,可以跟踪配备有定位元件的jamshidi针相对于布置在患者身体上的至少一个标记载体的位置和/或相对于参考定位元件的位置的位置。jamshidi针的位置可以显示在术前获得的患者模型中,以便外科医生可以跟踪jamshidi针在患者体内的位置,特别是跟踪在监视器上模拟的断层扫描获得的截面图像中jamshidi针到椎骨体中的刺入。
[0128]
可用于对通过执行根据本发明的配准方法进行配准的患者进行的外科手术中使用的另一种医疗器械是构造成用于细针抽吸活检(fnab)的空心针。利用设置在患者上用于术中配准患者的至少一个标记载体或者利用设置在患者上仅用于术中配准患者然后取出的至少一个标记载体,患者可以自动配准,空心针可以插入患者体内进行细针穿刺活检(fnab)。优选地,空心针配备有定位元件,当将空心针引导至可以是患者的脊柱或不同身体部位的目标位置时,该定位元件用于跟踪空心针相对于患者的位置。
[0129]
在一种用于配准脊柱的自动配准方法中,其中至少一个标记载体布置在椎骨上用于术中配准脊柱或至少一个标记载体布置在脊椎上仅用于术中配准脊柱并随后移除,插管医疗器械(例如导管或空心针)包括用于提供位置和取向信息的至少一个器械定位元件,可插入患者体内。器械定位元件可以布置成使得在例如插管医疗器械的内腔中,使得它可以被移除,例如,在医疗器械被导航到患者体内的目标位置之后。配备有器械定位元件的医疗器械的位置可以通过位置检测系统相对于患者并且例如相对于标记定位元件和/或相对于参考定位元件来跟踪。在器械定位元件已经从医疗器械的管腔中移除之后,管腔可以用于
例如抽吸或冲洗目的,例如用于将药物输送给患者。
[0130]
在如本文所述的用于配准脊柱的自动配准方法中,还可以将至少一个标记载体布置在椎骨上用于在手术中配准脊柱,或者可以将至少一个标记载体布置在脊柱上仅用于在术中配准脊柱并随后移除,可以将插管医疗器械插入患者体内,为附加医疗器械提供工作通道。优选地,附加医疗器械包括用于提供位置和取向信息的至少一个器械定位元件。引导通过插管医疗器械的工作通道的附加医疗器械的位置可以在导航系统的监视器上在术前获得的模型中显示。
[0131]
可用于本文所述的自动配准方法的标记载体可以以各种形状实现,例如,笼形、板形、棒形、圆柱体、立方体形等,并且可以由各种材料或材料组合制成,最好是硅树脂等合成材料。特别地,可以在本文描述的自动配准方法中使用的标记载体可以以在wo 2014/184382 a1中的图4至图9中示出和描述的参考体的形状来实现。优选地,可以在本文所述的自动配准方法中使用的标记载体具有允许布置多个可透视检测标记的尺寸,使得它们可以在生成的透视图像中被识别为单独的标记。优选地,在根据本发明的自动配准方法中使用的标记载体由不透辐射的材料制成,该材料比固定在其上的可透视检测标记更不透射线。在根据本发明的自动配准方法中使用的标记载体可以由对x射线基本透明的材料制成。
[0132]
可用于本文所述的自动配准方法的标记载体的共同点在于它们具有多个可透视检测标记和固定在其上的至少一个标记定位元件。至少一个标记定位元件配置为提供表示标记定位元件在交变电磁场中的位置和取向的传感器信号。特别地,至少一个标记定位元件和标记载体的多个标记中的至少一个标记之间的相对距离和取向是已知的。
[0133]
关于导航系统,上述目的通过一种导航系统来实现,该导航系统配置为执行根据本文描述的自动配准方法之一的配准方法。导航系统包括至少一个标记载体、位置检测系统、x射线装置和配准单元。
[0134]
至少一个标记载体具有多个可透视检测标记和固定在其上的至少一个标记定位元件。至少一个标记定位元件配置为提供表示标记定位元件在电磁场中的位置和取向的传感器信号。标记定位元件和多个可透视检测标记中的至少一个布置成使得至少一个标记定位元件和多个标记中的至少一个标记之间的相对距离和取向是已知的。
[0135]
如果标记载体设置在对象的外表面上,则标记定位元件的位置可以通过位置检测系统确定,该位置检测系统对应于或可以与真实空间中对象外表面上的位置相关。由于至少一个可透视检测标记与标记定位元件具有已知的空间关系,因此可以通过导航系统的配准单元经由变换函数将对象外表面上的点在真实空间中的位置转换为术前获得的模型的模型点的坐标。
[0136]
位置检测系统具有用于产生电磁场,例如交变电磁场的场发生器。位置检测系统配置用于确定至少标记定位元件在电磁场中的位置和取向。
[0137]
x射线装置具有x射线源和x射线检测器,用于记录透视图像数据,从这些数据可以产生至少标记载体的透视图像,使得标记载体的至少两个标记在生成的透视图像中可见。例如,x射线装置可以是c形臂。
[0138]
配准单元配置用于将生成的透视图像的图像点与术前获得的模型的模型点相关联。特别地,配准单元连接到位置检测系统以访问和使用至少一个标记定位元件的确定的位置和取向。配准单元还配置用于处理透视图像的图像信息,该图像信息可以例如由配准
单元自身生成或由另一合适的处理单元生成,该处理单元配置为从用x-射线装置记录的透视图像数据重建透视图像点以生成透视图像。
[0139]
特别地,配准单元配置用于使用至少一个标记定位元件的确定的位置和取向以及至少一个标记定位元件和多个标记中的至少一个标记之间的已知相对距离和取向和/或所述多个标记中的另一标记与关于至少一个标记定位元件具有已知相对距离和取向的至少一个标记之间的已知空间关系。
[0140]
标记定位元件和至少一个标记之间的已知空间关系可以用例如从标记定位元件的坐标指向标记的坐标的向量来表达。例如,可以在标记定位元件的坐标系中定义向量。使用位置检测系统,可以相对于例如可以与场发生器相关联的位置检测系统的坐标系来确定标记定位元件的坐标系的位置和取向。表示已知空间关系的向量可以被变换成不同的坐标系,例如,并用于在根据本发明的自动配准方法的范围内建立变换函数。
[0141]
配准单元配置为通过将生成的透视图像的图像点与术前获得的模型的模型点相关联来建立变换函数,其用于在对象处建立的参考坐标系和在术前获得的模型处建立的坐标系之间变换坐标。配准单元可以是导航系统的数据处理单元的一部分或连接到例如导航系统的数据处理单元和/或监视器的单独部件。特别优选地,配准单元配置为,如果生成的透视图像显示一个或多个区段,则对于一个或多个区段的每个生成的透视图像,这些透视图像中的相应一个的图像点可以与术前获得的模型的模型点分段相关。配准单元可以配置为根据在生成的透视图像中可见的相应标记载体的标记来识别和/或定义对象的区段。
[0142]
包括器械定位元件的器械,例如医疗器械,可以连接到导航系统。这允许跟踪器械相对于对象的位置,例如,相对于参考定位元件或相对于用作参考定位元件的标记定位元件的位置。被跟踪器械的位置可以在术前获得的对象模型中显示给用户,以帮助用户导航器械。
附图说明
[0143]
在下文中,将参考附图描述本发明的优选实施例。在图中:
[0144]
图1:示出用于自动配准对象的配准方法的流程图;
[0145]
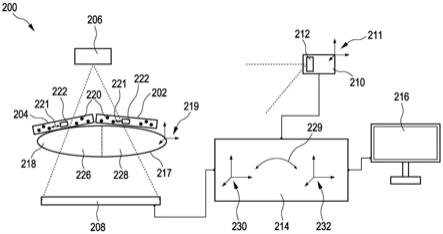
图2:显示配置用于执行自动配准对象的配准方法的导航系统;
[0146]
图3:示出了包括用于配准患者的柔性标记载体的导航系统;
[0147]
图4:显示用于执行患者脊柱的自动2d配准的导航系统;
[0148]
图5:显示用于执行患者脊柱的自动2d配准的导航系统;
[0149]
图6:显示用于对患者暴露的脊柱进行自动3d配准的导航系统;
[0150]
图7:显示用于执行患者脊柱的微创自动3d配准的导航系统。
具体实施方式
[0151]
图1显示了表示用于自动配准对象的方法的流程图。
[0152]
在该方法的步骤s1中,提供术前获得的对象模型。该模型可以是从通过断层扫描记录的2d、3d或4d图像数据生成的2d、3d或4d模型。例如,术前获得的模型可以从配准到3d模型的2d透视图像生成。该模型可以被生成为对象的形貌图像,使得它代表对象的外表面或对象的至少一部分。
[0153]
为了帮助用户相对于对象导航器械,模型可以显示在导航系统的监视器上。如果器械配备器械定位元件,则可以通过导航系统的位置检测系统跟踪器械的位置,以显示器械在对象模型中的位置。
[0154]
为了能够在可视化模型中显示器械的位置,例如,以图标或以器械的数字表示,最初,模型需要配准到对象。
[0155]
在自动配准方法中,使用最初在步骤s2中提供的一个或多个标记载体来执行配准。至少一个标记载体具有多个可透视检测标记和固定在其上的至少一个标记定位元件。特别地,配准方法中使用的一个或多个标记载体可以以与参考图3至图7描述的标记载体相同的方式配置。
[0156]
标记定位元件可以包括一个或多个传感器线圈,例如,两个传感器线圈被布置成彼此正交并且被配置用于捕获电磁场。由标记定位元件捕获的电磁场,例如交变电磁场可以是由导航系统的场发生器产生的电磁场。由标记定位元件捕获的电磁场在传感器线圈中感应出电压,该电压取决于标记定位元件在电磁场中的位置和取向。从代表在传感器线圈中感应的电压的抽头传感器信号中,可以例如通过经由用于接收传感器信号的电缆连接到标记定位元件的位置检测系统来导出标记定位元件的位置和取向。特别地,利用包括两个正交布置的传感器线圈的标记定位元件,可以在六个自由度中确定位置和取向。
[0157]
标记载体的可透视检测标记可以是例如金板。标记载体的可透视检测标记可用作生成的透视图像中的基准点。
[0158]
对于具有可透视检测标记和固定在其上的至少一个标记定位元件的至少一个标记载体,至少一个标记定位元件与多个可透视检测标记中的至少一个标记之间的相对距离和取向是已知的。
[0159]
特别地,已知的空间关系以固定几何数据的形式先验地可用,并且可以作为自动配准方法的输入,例如通过表示至少一个标记定位元件和多个可透视检测标记中的至少一个标记之间的固定空间关系的常数向量或矩阵来提供。
[0160]
例如,几何数据可以以向量的形式提供,该向量最初表示标记定位元件和标记定位元件坐标系中的标记之间的空间关系。在配准方法的范围内,可以将向量转换为例如用于配准对象的参考坐标系。
[0161]
为了进行自动配准方法,在步骤s3中,将至少一个标记载体布置在对象的外表面上。在配准方法的各种变体中,两个或更多个标记载体同时布置在对象的外表面上。在配准方法的其他变体中,一个或多个标记载体以连续的步骤布置在对象的外表面上。
[0162]
在步骤s4中,在布置在对象的外表面上的至少一个标记载体中,与对象的至少一个区段一起生成至少一个透视图像。特别地,以这样的方式生成透视图像,使得布置的标记载体的至少两个标记与对象的至少一区区段一起在生成的透视图像中可见。
[0163]
优选地,对象的区段的区域被定义为使得区段所包括的元件的相对运动相对于配准精度可以忽略不计。例如,可以将对象本身分成所需的多个区段,以确保在每个区段的区域内,两个相应点之间的潜在相对运动可以忽略不计。在配准方法的范围内,可以确定区段相对于彼此的相对运动。优选地,在每个区段上,标记载体布置在相应区段上并与相应区段相关联。为了生成对象的透视图像,可以在对象的各个区段上布置多个标记载体。在自动配准方法的变体中,标记载体逐段移位,并且在布置标记载体的每个步骤中,生成标记载体连
同其上布置标记载体的各个区段的透视图像。从先前记录的透视图像数据生成透视图像。
[0164]
如果多个标记载体布置在对象的外表面上,优选地,至少一个透视图像以这样的方式生成,使得每个布置的标记载体的至少两个标记与相应的区段一起可见。优选地,在至少一个生成的透视图像中,若干区段并且对于每个段,布置在该区段上的相应标记载体的至少两个标记是可见的。在多个标记彼此具有已知空间关系的情况下,与相应区段一起可见的至少两个标记中的每一个可用于计算在透视图像的坐标系中不可见的标记的坐标,例如,用于重建对象的形貌。有利的是,同时布置在对象上的标记载体被标记化为例如数字1、2、3等。标记载体的标记化有利于将可见标记与相应的区段相关联。由于多个区段并且对于每个区段,在生成的透视图像中可以看到至少两个标记,因此可以通过在生成的透视图像中可见的那些标记的位置来确定区段之间的空间关系。
[0165]
如果在自动配准方法中,标记载体以连续步骤布置在对象的外表面上,则在每个连续步骤中,可以生成标记载体和至少其上布置标记载体的区段的透视图像。结果,在每个连续的步骤中,生成标记载体和相应区段的单独的透视图像。可以生成在连续步骤中生成的透视图像,使得它们与它们各自的相邻透视图像重叠。
[0166]
每个单独的透视图像可以用于将模型分段地配准到对象的各个区段。也可以将透视图像拼接成更大的透视图像,该图像显示生成透视图像的所有区段。在拼接的透视图像中,优选地,对于标记载体以连续步骤布置在其上的每个区段,至少两个可透视检测标记与相应区段一起可见。显示若干区段并且对于每个区段至少两个相关联的标记的拼接透视图像类似于同时布置在对象上的多个标记载体生成的透视图像。如果将多个单独的透视图像拼接到一个透视图像,则拼接的透视图像可以用于将术前获得的模型配准到对象。根据拼接或未拼接的几个单独的透视图像,可以通过使用在各个透视图像中可见的标记的位置来确定区段之间的空间关系。
[0167]
为了配准对象,也可以使用柔性标记载体,例如带,其具有多个可透视检测标记和固定在其上的至少一个标记定位元件。柔性标记载体可以设置在对象的外表面上,并且可以使其形状适应外表面的形貌。优选地,可透视检测标记以这样的方式固定到柔性标记载体的带上使得至少三个标记的各个组各自形成可以与由生成的透视图像中的其他标记组形成的图案区分开来的图案。由于至少三个标记的每个组可以与至少三个标记的另一组区分开来,通过将区段与相应的标记组相关联,可以在生成的透视图像中识别对象的区段。
[0168]
使用至少三个标记的组是有利的,因为根据例如由在生成的透视图像中可见的三个标记的组形成的三角形的变形,可以确定三角形相对于对象的外表面的取向,特别是对象的相关区段。由于至少三个标记的几个组固定在标记载体上,因此对于若干区段,可以确定相应组的标记相对于相应区段的表面的取向。该信息可用于重建对象外表面的形貌。
[0169]
在生成至少一个透视图像之前或在生成至少一个透视图像的同时或在生成至少一个透视图像之后,在自动配准方法的步骤s5中,确定布置在对像的外表面上的标记载体的至少一个标记定位元件的位置和取向。例如,可以利用导航系统的位置检测系统来确定标记定位元件的位置和取向。
[0170]
由于具有标记定位元件的标记载体设置在对象的外表面上,因此确定的标记定位元件的位置和取向可以与对象外表面上的点在真实空间中的位置相关联。可与对象外表面上的点相关联的确定的标记定位元件的位置和取向可用于在对象处建立参考坐标系。
[0171]
可以使用确定的标记定位元件的位置和取向以及可透视检测标记的位置在对象处建立参考坐标系。这是可能的,因为至少一个标记定位元件和多个标记中的至少一个标记之间的相对距离和取向是已知的。
[0172]
为了配准对象,还需要在术前获得的模型上建立参考坐标系,以便找到用于在两个参考坐标系之间变换坐标的变换函数。
[0173]
为了在术前获得的模型处建立参考坐标系,在自动配准方法的步骤s6中,将生成的透视图像的图像点与术前获得的模型的模型点相关联。为了将透视图像的图像点与模型的各个模型池相关联,可以使用标记定位元件和可透视检测标记中的至少一个之间的已知空间关系。替代地或附加地,为了使用标记定位元件和至少一个可透视检测标记之间的已知空间关系,还使用标记定位元件的位置和取向以及另一标记和关于标记定位元件具有已知空间关系的至少一个标记之间的已知空间关系。此外,可以使用对象外表面上的点在真实空间中的位置来例如使对象在真实空间上的点与术前获得的模型的模型点相关联,对于对象外表面上的点在真实空间中的位置,可以通过检测标记定位元件的位置和取向来确定位置检测系统的坐标系中的相应坐标。
[0174]
有利地,在用于每个生成的透视图像的自动配准方法中,图像点可以与术前获得的模型的模型点分段关联。将图像点与模型点分段关联可以包括将对象的区段的图像点与术前获得的对象模型的对应区段的模型点相关联。例如,可以识别人工或解剖标志,并且表示该标志的图像点可以与对应模型点相关联。分段配准包括为每个区段建立单独的变换函数,该变换函数可以独立于为其他分段建立的变换函数而更新。分段配准允许检测特定区段相对于其他区段和/或相对于参考定位元件的相对移动,并再次配准该特定区段以更新与该区段相关联的变换函数以保持高配准精度。
[0175]
由于可以针对对象的各个区段建立单独的变换函数,因此可以检测配准误差,该配准误差可以被校正以提高配准精度。配准误差可能在初始配准中已经发生,例如,由电磁场波动引起,也可能在初始配准后发生,例如,由一个或多个对象元件的相对运动引起。检测配准误差是可能的,因为可以分析几个已建立的变换函数并且可以比较各自的坐标变换,在导航过程中也可以在术中进行。
[0176]
由于分段配准,还可以检测对象的至少一个元件相对于其他区段或相对于参考定位元件的相对移动。如果检测到对象元件之一的相对移动,则与例如相对于其它区段已移动的区段相关联的一个或多个变换函数可以通过重复相应区段的配准来更新。具体地,可以通过确定术前获得的模型的至少一个模型点与透视图像的对应图像点的偏差来检测对象的元件的相对运动。确定的偏差可以表示元件相对运动的度量,例如,根据定义元件相对运动的方向和相对距离的偏差向量。
[0177]
自动配准方法的优点是可以分段配准对象。自动配准方法特别适用于配准对象的各个区段,该对象包括可以相对彼此移动的多个元件。例如,对象可以是患者的脊柱,而区段可以是椎骨。例如,为了配准脊柱,可以沿着脊柱布置几个标记载体以限定包括例如可以单独配准的一个或多个椎骨的区段。可以分段跟踪多个区段之间的相对移动,并且可以根据检测到的区段之间的相对移动来更新变换函数。
[0178]
图2示出了导航系统200,其配置为执行用于自动配准对象的配准方法,例如,用于执行参考图1描述的配准方法。
[0179]
导航系统200包括两个标记载体202、204、包括x射线源206和x射线检测器208的x射线装置、包括用于产生电磁场的场发生器212的位置检测系统210、配准单元214和监视器216。
[0180]
作为示例,标记载体202、204布置在对象218的外表面217上。标记载体202、204中的每一个具有多个可透视检测标记220和固定在其上的标记定位元件222。导航系统200的标记载体202、204可以以与参考图1描述的标记载体相同的方式配置,例如,标记载体可以是刚性或柔性的标记载体,或者可以如参考图3至图7描述的那样配置。导航系统200可仅包括标记载体202、204之一。为了配准对象218,标记载体可以逐段移位。导航系统200还可包括两个以上的标记载体202、204,其中为了配准对象218,几个标记载体同时布置在对象218的外表面217上,例如,作为簇或沿线布置。导航系统可以可选地包括参考定位元件(未示出),该参考定位元件配置用于捕获电磁场并且相对于对象218静止地布置。如果存在,参考定位元件可以固定到对象218本身或者可以距对象一定距离固定地布置。标记载体202、204的位置和取向可以用位置检测系统210确定,例如,相对于参考定位元件的位置。
[0181]
标记定位元件222配置用于捕获由位置检测系统210的场发生器212生成的电磁场,并且用于提供表示标记定位元件222在电磁场中的位置和取向的传感器信号。如果标记定位元件222包括一个或多个传感器线圈,则所提供的传感器信号表示在线圈中感应的电压,该电压取决于标记定位元件222在电磁场中的位置和取向。
[0182]
如果标记载体202、204之一布置在对象218的外表面217上,则可以确定标记定位元件222的位置和取向并且与对象218的外表面217上的点在真空空间219中的位置相关联。基于标记定位元件222与对象外表面上217的点的位置217之间的已知空间关系,该点的位置可以用位置检测系统的坐标系211的坐标表示,反之亦然。
[0183]
标记载体202可以设计成使得-如果标记载体布置在外表面217上-标记定位元件222直接布置在外表面217上使得通过位置检测系统210直接确定的标记定位元件222的位置对应于对象218的外表面217上的点的位置。标记载体202也可以设计成使得-如果标记载体202布置在外表面217上-标记定位元件222位于外表面217上方一定距离处,使得外表面217上的相应点在位置检测系统的坐标系211中的坐标可以通过考虑表示表面点和标记定位元件222的位置之间的相对距离的偏移来计算。
[0184]
由于至少一个可透视检测标记220与标记定位元件222具有先验已知的空间关系(由箭头221指示),所以标记的位置可以用位置检测系统的坐标系211中的坐标表示以及还根据对象空间219中的坐标表示。通过标记定位元件222的位置和取向,并且可选地,通过使用与标记定位元件222具有已知相对距离和取向的至少一个标记220,可以在对象218处建立参考坐标系224。
[0185]
利用x射线装置,例如c形臂,可以记录代表标记载体202、204中的至少一个和对象218的至少一个片段226、228的透视图像数据。根据记录的透视图像数据,可以通过从透视图像数据重建图像点来生成透视图像。优选地,生成透视图像,使得在透视图像中,每个标记载体202、204的至少两个标记220与对象218的至少一个片段226、228一起可见。这允许在术前获得的模型处建立参考坐标系,找到用于将模型的模型点的坐标变换为真空空间中对象218的表面217上的点的坐标的变换函数。
[0186]
对象的配准,即建立用于在对象218处的参考坐标系230和模型处的参考坐标系
232之间变换坐标的变换函数229,由配准单元214执行。配准单元214配置用于访问生成的透视图像以及用于将生成的透视图像的图像点与术前获得的对象218模型的模型点相关联。表示术前获得的模型的模型数据可以直接存储在相应存储介质上的配准单元中。配准单元214还连接到位置检测系统210,用于访问确定的标记定位元件222的位置和取向。
[0187]
导航系统200的配准单元214是导航系统200的数据处理单元(未示出)的一部分。在替代实施例中,配准单元是位置检测系统的一部分。在又一替代实施例中,位置检测系统和配准单元是导航系统的相同数据处理单元的部件。
[0188]
配准单元214配置为使用确定的标记定位元件222的位置和取向以及可选地,至少一个标记220和标记定位元件222之间的空间关系在对象处建立参考坐标系230。配准单元214配置为使用所生成的透视图像在模型处建立参考坐标系232,其中至少两个标记220与至少一个片段一起可见。在模型处建立参考坐标系可以通过配准单元214来实现,因为配准单元214配置为使用确定的标记定位元件222的位置和取向以及标记定位元件222与至少一个可透视检测标记220之间的已知相对距离和取向和/或另一标记与关于标记定位元件222具有已知空间关系的标记之间的空间关系将透视图像的图像点与模型的各个模型点相关联。
[0189]
标记定位元件222和标记220之间的已知空间关系作为配准单元214的输入被提供为配准之前的几何数据。几何数据可以例如由用户作为输入提供,或者可以存储在存储介质上,使得配准单元214可以从存储介质读取几何数据。几何数据可以以表示例如标记定位元件222和标记220之一之间的固定空间关系的常数向量或矩阵的形式提供。在标记定位元件222和两个或更多个标记220之间的空间关系是已知的情况下,几何数据集可以作为输入提供给配准单元214,该几何数据集包括每个已知空间关系的几何数据。
[0190]
特别地,配准单元214配置用于将生成的透视图像的图像点与术前获得的模型的模型点分段关联。
[0191]
配准单元214连接到导航系统的监视器216。例如,如果配备有器械定位元件的器械(未示出)与导航系统200一起使用,则可以在监视器216上在术前获得的模型的各个截面图像中显示器械的位置和取向。导航系统200可用于帮助用户相对于对象218导航器械。
[0192]
在图3中,示出了用于配准患者302的导航系统300。导航系统300包括位置检测系统304、配准单元305、c形臂306、参考定位元件308以及具有可透视检测标记312和固定在其上的标记定位元件314的标记载体310。
[0193]
标记载体310布置在患者302的皮肤上。标记载体310配置为柔性带,使得当布置在对象(这里是患者302)的外表面上时,标记载体310可以使其形状适配外表面的形貌。
[0194]
固定在柔性带310上的可透视检测标记312以至少三个标记为一组布置,在生成的透视图像中,至少三个标记的一组形成与由其他标记组形成的图案区分开来的图案。在本示例中,显示了两种图像。第一图案320包括三个标记并且第二图案322包括四个标记。在距可透视检测标记312一定距离处,标记定位元件314固定在柔性带310上。对于柔性带310,所有标记312和标记定位元件314之间的相对距离和取向是固定的。这里,标记312中的相应一个和标记定位元件314之间的相对距离和取向是沿着标记载体310的表面定义的。相对距离是指沿着柔性标记载体310的外表面在相应标记312和标记定位元件314之间的最短距离。
[0195]
c形臂306具有x射线源316和x射线检测器318,并且配置用于生成患者302的透视
图像。特别地,可以生成患者302的透视图像,使得对象的至少两个片段在生成的透视图像中是可识别的,因为每个片段被分配给由标记312形成的不同图案320、322。由于标记312布置在标记载体310上的固定位置并形成可以与其他图案区分开来的图案,因此可以确定患者302的外表面的形貌。确定患者302的外表面的形貌可以实现,因为标记之间的相对距离和取向是已知的,使得在在生成的透视图像中可见的图案的投影中,可以以标记之间的相对距离和取向确定图案偏差。从该偏差中,可以确定图案相对于在透视图像中可见的投影平面的角度,并将其用于重建患者皮肤的形貌。
[0196]
位置检测系统304配置用于确定参考定位元件308的位置和取向以及用于确定标记定位元件314的位置和取向。特别地,可以相对于参考定位元件308的位置和取向确定标记定位元件314的位置和取向。优选地,标记定位元件314包括两个正交布置的传感器线圈并实现六自由度传感器。特别地,在标记载体310布置在患者皮肤上的情况下,确定的标记定位元件314的位置和取向可以直接分配给患者302皮肤上的点的位置。作为分配标记定位元件的位置和取向至患者302皮肤上的点的位置的结果,患者302上的相应点可以用位置检测系统的坐标系324的坐标来表示,反之亦然,标记定位元件的位置和取向可以用患者空间中的坐标表示。标记定位元件314因此可以用于在患者302处建立参考坐标系。例如,可以通过变换位置检测系统的坐标系324使得其原点位于患者皮肤上的具有与确定的标记定位元件314的位置和取向一致的位置和取向的那个点处,来在患者处建立参考坐标系。
[0197]
位置检测系统304包括配准单元305,配准单元305配置用于配准患者302。特别地,配准单元305配置用于将由c形臂306生成的透视图像的图像点与术前获得的模型点关联。配准单元配置为使用确定的标记定位元件314的位置和取向以及每个标记312和标记定位元件314之间的已知相对距离和取向。基于确定的标记定位元件的位置和取向以及标记312和标记定位元件314之间的已知空间关系,可以在患者处和在患者302的术前获得的模型处建立参考坐标系,并找到用于在两个参考坐标系之间变换坐标的变换函数。
[0198]
图4示出了用于通过插值对患者脊柱402进行自动2d配准的导航系统400。
[0199]
导航系统400包括位置检测系统404、参考定位元件406、具有x射线源408和x射线检测器410的x射线装置以及两个标记载体412、414。
[0200]
标记载体412、414中的每一个被设计为具有特征的、近似三角形的基部区域和圆形穿孔416的板。标记载体412、414中的每一个具有多个可透视检测标记418和标记定位元件420。
[0201]
为了配准脊柱402,在脊柱402的两个相对侧的每一侧上,布置两个标记载体412、414中的相应一个。例如,两个标记载体412、414中的一个可以布置在距患者背部的脊柱一定距离处,并且另一个标记载体可以布置在患者的相对侧,例如患者的胃部。如果脊柱402暴露,标记载体412、414也可以布置得更靠近脊柱本身并且甚至可以附接到脊柱的椎骨。由于脊柱402设置在两个标记载体412、414之间,为了脊柱402的自动2d配准,在脊柱外表面上的点的位置可以通过相对于两个标记载体412、414的插值来确定,并且特别地相对于标记载体412、414中的每一个的标记定位元件420的确定的位置和取向来确定。通过插值确定脊柱外表面上的点的位置是可能的,因为可以通过利用位置检测系统404检测每个标记载体412、414的标记定位元件420的位置和取向来确定两个标记载体412、414之间的相对位置和取向。
[0202]
每个标记载体412、414的标记定位元件420的位置和取向可以用位置检测系统404确定,例如,相对于参考定位元件406在电磁场中的位置和取向。参考定位元件406可以附接到患者本身,例如附接到皮肤,或者如果脊柱暴露,则可以直接附接到脊柱的椎骨。
[0203]
使用x射线装置,可以生成布置在脊柱404的相对侧的两个标记载体412、414的透视图像,使得在透视图像中两个标记载体412、414中的每一个的至少两个标记418以及优选地脊柱402的两到四个椎骨是可见的。
[0204]
位置检测系统404包括配准单元422,配准单元422配置为将生成的透视图像的图像点与术前获得的脊柱402模型的模型点关联。将图像点与模型点关联可以由配准单元422通过使用标记载体412、414中的每一个的标记定位元件420的确定的位置和取向以及可透视检测标记418与两个标记载体412、414中的相应一个的标记定位元件420之间的已知空间关系来执行。
[0205]
在图5中,显示了用于通过外推对患者脊柱502进行自动2d配准的导航系统500。
[0206]
导航系统500包括位置检测系统504、标记载体506、参考定位元件508以及具有x射线源510和x射线检测器512的x射线装置。
[0207]
标记载体506包括相对于它们的基面彼此平行布置的两个板。这两个板通过三个销相互刚性连接。借助销,两个板彼此以固定的相对距离布置。在两个板上的每一个上都固定有可透视检测标记514,并且在其中一个板上固定有标记定位元件516。两个板的每个标记514与标记定位元件516之间的相对距离和取向是已知的。
[0208]
为了配准脊柱502,将标记载体506布置在脊柱502上。将标记载体506布置在脊柱502上可以包括将标记载体506直接布置在暴露的脊柱502上或者在距脊柱502一定距离处布置在患者的外层皮肤上。导航系统510还可以包括与标记载体506相同并且可以例如沿着患者脊柱的长度同时布置在患者上的另外的标记载体。
[0209]
如果标记载体506布置在脊柱上,则可以利用位置检测系统504确定标记定位元件516的位置和取向,例如,相对于参考定位元件508的位置。如果脊柱502暴露,参考定位元件508可以刚性地直接附接到脊柱的椎骨。然而,参考定位元件508也可以附接到患者的外皮或可以刚性地布置在靠近患者的距离处。根据确定的标记定位元件516的位置和取向以及参考元件508的位置和取向,可以推断出位置检测系统的坐标系中脊柱502上的点的位置。
[0210]
在标记载体506中,可以用x射线装置生成透视图像,使得在透视图像中,至少两个标记514与脊柱502的至少一个区段,例如至少一个椎骨一起可见。
[0211]
位置检测系统504包括配准单元518,该配准单元518配置为访问生成的透视图像和确定的标记定位元件516的位置和取向,以便将生成的透视图像的图像点与术前获得的模型的模型点关联。为了将图像点与模型点关联,配准单元518使用确定的标记定位元件516的位置和取向以及标记514和标记定位元件516之间的已知空间关系。
[0212]
在图6中,示出了导航系统600,其可用于例如配准暴露的脊柱602。
[0213]
导航系统600包括位置检测系统604、具有x射线源606和x射线检测器608的x射线装置、参考定位元件620和标记载体612。
[0214]
标记载体612具有多个可透视检测标记614和固定在其上的标记定位元件616。标记载体612以笼形实施,使得标记载体612可以布置在脊柱602上以包围暴露的椎骨。因此,脊柱的自动3d配准是可能的。标记载体612的特征在于可透视检测标记614彼此之间以及与
标记定位元件616具有已知的空间关系。
[0215]
可以利用位置检测系统604来确定标记定位元件的位置和取向。特别地,可以由位置检测系统604相对于参考定位元件610的位置和取向来确定标记定位元件616的位置和取向,参考定位元件刚性固定到脊柱的椎骨。
[0216]
导航系统600可以包括另外的标记载体,这些标记载体可以以与标记载体612相同的方式配置。如果导航系统600包括笼形标记载体,则若干标记载体可以沿着暴露的脊柱602布置,包围暴露的椎骨。
[0217]
使用x射线装置,标记载体612的透视图像可以与脊柱的至少一个区段一起生成。区段可以包括一个椎骨,例如,标记载体612布置在其上的椎骨,使得在生成的透视图像中,优选地,该椎骨与两到三个相邻椎骨一起可见。
[0218]
导航系统600的位置检测系统604包括配准单元618,配准单元618配置为将生成的透视图像的图像点与术前获得的脊柱模型的模型点关联。为了将图像点与模型点关联,配准单元618配置为使用确定的标记定位元件616的位置和取向以及标记614中的至少一个和标记定位元件616之间的已知相对距离和取向。
[0219]
在图7中,示出了导航系统700,其可用于在微创手术中执行脊柱702的自动3d配准。
[0220]
导航系统700包括两个标记载体704、706、位置检测系统708、参考定位元件710以及具有x射线源712和x射线检测器714的x射线装置。
[0221]
两个标记载体704、706中的每一个实施为棒形并且包括沿棒的长度布置的多个可透视检测标记718。标记载体704、706各自具有固定在其上的标记定位元件720,其中标记718和标记定位元件720之间的相对距离和取向是已知的。标记载体704、706的每个标记定位元件720通过电缆722连接到位置检测系统708,用于传输表示各个标记定位元件720在由位置检测系统的场发生器(未显示)产生的电磁场中的位置和取向的传感器信号。特别地,标记定位元件720的位置和取向可以由位置检测系统708相对于刚性固定到脊柱椎骨的参考定位元件710的位置和取向来确定。
[0222]
在微创手术中,两个标记载体704、706可以插入患者体内并导航到患者脊柱702,使得在脊柱的两个相对侧的每一个上,布置标记载体704、706中的相应一个。因此,可以执行脊柱702的自动3d配准。
[0223]
由于两个标记载体704、706布置在患者脊柱702旁边,可以通过x射线装置生成透视图像。优选地,生成透视图像,使得在透视图像中,每个标记载体704、706的至少两个标记718与脊柱702的至少一个区段一起可见。例如,优选地,在生成的透视图像中可以看到三到四个椎骨。
[0224]
导航系统的位置检测系统708包括配准单元716,配准单元716配置为将生成的透视图像的图像点与术前获得的患者脊柱702模型的模型点关联。为了将图像点与模型点关联,配准单元716配置为使用标记载体704、706中的每一个的标记定位元件720的确定的位置和取向以及标记718中的至少一个与相应标记定位元件720之间的已知空间关系。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。