1.本实用新型涉及一种大尺寸玻璃快速翻转设备,属于玻璃生产技术领域。
背景技术:
2.随着大尺寸显示设备的发展,市场对大尺寸液晶玻璃面板的需求越来越大,在大尺寸液晶玻璃的生产过程中需要大量的输送装置,配合以客户端对液晶玻璃面板生产工艺的需求,需要将大尺寸玻璃基板由水平翻至倾斜一定角度进行输送,或者需要将大尺寸玻璃基板由倾斜翻至水平进行输送。同时,需要兼顾现场设备运行节拍,以及尽可能提高生产效率降低成本。
3.液晶玻璃面板生产现有技术工序中,用以实现玻璃翻转的设备,随着玻璃面板尺寸的增大,翻转时间越来越长,使得生产线的节拍越来越慢,以至于成为产线提升节拍的瓶颈,与上下游设备间配合效率较低成为主要问题。
4.为此,开发一种能够合理优化结构和动作时序的翻转设备,以配合上下游设备提高产线节拍,以克服当前存在的效率较低问题。
技术实现要素:
5.根据以上现有技术中的不足,本实用新型要解决的技术问题是:克服现有技术的不足,提供一种大尺寸玻璃快速翻转设备,可以解决大尺寸玻璃输送过程中,玻璃翻转输送效率低的问题。
6.本实用新型所述的大尺寸玻璃快速翻转设备,包括若干用于承载并传送玻璃的翻转输送单元,若干翻转输送单元沿玻璃输送方向呈线性阵列排布,形成一条翻转输送通道;翻转输送单元的宽度与玻璃宽度相适配,每个翻转输送单元均可独立绕其旋转轴心竖直转动,若干翻转输送单元的旋转轴心共线,且与玻璃输送方向平行。
7.本实用新型用于大尺寸玻璃输送线上的玻璃快速翻转,接收倾斜状态玻璃,然后翻转至水平状态并输出玻璃。同样,翻转设备也可以用于接收水平状态玻璃,翻转至倾斜状态并输出玻璃。
8.本实用新型所述的翻转输送单元上设有气浮支撑,且内侧面设有输送轮。气浮装置通过吹出稳定的气流将玻璃托举,能够避免玻璃运送过程中摩擦而产生划伤缺陷;输送轮可自转,与玻璃相接触带动玻璃在翻转输送单元上前进。
9.优选的,所述的旋转轴心设置在翻转输送单元的正下方。
10.具体的,所述的旋转轴心处设置有旋转轴,翻转输送单元可在驱动装置作用下绕旋转轴旋转。
11.具体的,所述的驱动装置为气缸,气缸的活塞杆转动连接在翻转输送单元底部的一侧。
12.本实用新型中,每个翻转输送单元都可独立动作,互不影响。当玻璃进入第一个翻转输送单元时,其后的翻转输送单元从左至右依次翻转一定角度,用于接收输送来的玻璃。
例如,当玻璃进入第一个翻转输送单元时,第二个翻转输送单元翻至与第一个翻转输送单元平行的位置,用于接收输送来的玻璃。当整块玻璃完全进入装置以后,对应整块玻璃下方的若干翻转输送单元同时动作,带动玻璃翻转至需要的角度。
13.翻转时需要玻璃板完全处于翻转设备上,需要翻转设备的总长度大于玻璃板长度,才能顺利完成翻转动作。
14.翻转至需要的角度后,玻璃板从最后一组翻转输送单元的位置输出。
15.当玻璃后边缘离开上一翻转输送单元时,上一翻转输送单元可及时恢复到接收角度,不必等玻璃完全离开翻转设备,大大提高了翻转输送效率。
16.本实用新型与现有技术相比所具有的有益效果是 :
17.本实用新型所述的大尺寸玻璃快速翻转设备,每个翻转输送单元都可独立动作,互不影响。通过合理巧妙的结构设计,优化了翻转设备动作时序,能保证翻转输送过程中动作的及时性,解决了大尺寸玻璃输送过程中,玻璃快速翻转输送的问题,提高了生产线效率。
附图说明
18.图1是本实用新型的立体结构示意图;
19.图2是本实用新型的俯视结构示意图;
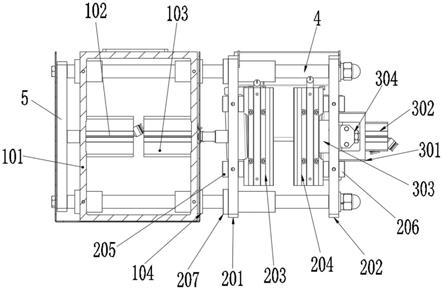
20.图3是本实用新型的侧视结构示意图;
21.图4是单个翻转输送单元结构示意图。
22.图中:接收单元1、翻转输送单元2、输出单元3、输送轮4、气浮支撑5、旋转轴6。
具体实施方式
23.下面结合具体的实施例对本实用新型进一步说明。但这些例举性实施方式的用途和目的仅用来例举本实用新型,并非对本实用新型的实际保护范围构成任何形式的任何限定,更非将本实用新型的保护范围局限于此。
24.如图1~4所示,本实用新型所述的大尺寸玻璃快速翻转设备,包括8组用于承载并传送玻璃的翻转输送单元2,8组翻转输送单元2沿玻璃输送方向呈线性阵列排布,形成一条翻转输送通道;每组翻转输送单元2的宽度均与玻璃宽度相适配,每个翻转输送单元2均可独立绕其旋转轴心竖直转动,8组翻转输送单元2的旋转轴心共线,且与玻璃输送方向平行。
25.其中,翻转输送单元2上设有气浮支撑5,且内侧面设有输送轮4。气浮装置通过吹出稳定的气流将玻璃托举,能够避免玻璃运送过程中摩擦而产生划伤缺陷;输送轮可自转,与玻璃相接触带动玻璃在翻转输送单元上前进。
26.具体的,旋转轴心设置在翻转输送单元2的正下方,旋转轴心处设置有旋转轴6,翻转输送单元2可在气缸作用下绕旋转轴6旋转。其中,气缸的活塞杆转动连接在翻转输送单元2底部的一侧(如图4所示)。
27.为了便于理解,本实施例中,第一组翻转输送单元2作为接收单元1,最后一组翻转输送单元2作为输出单元3。接收单元1和翻转输送单元2以及输出单元3宽度相等。
28.下面给出本实施例的工作过程:
29.玻璃倾斜状态时的倾斜角度,根据生产工艺需要为不固定值,其值在5~80度之间。
首先,表述倾斜状态为为水平方向旋转5度后的位置,玻璃初始状态为倾斜5度状态。
30.接收单元1固定为5度位置,输出单元3固定为水平位置。中间6个翻转输送单元2每个单元都可独立动作,互不影响。
31.当玻璃进入接收单元1时,翻转输送单元2从左至右依次翻至5度位置形成与接收单元1平行的状态,用于接收输送来的玻璃。接收单元1长度需要满足当玻璃进入接收单元1时,其后的翻转输送单元2由水平位置翻至5度位置所需时间,小于玻璃在接收单元1上的运行时间。即当玻璃进入接收单元1时,翻转输送单元2由水平位置开始动作,当玻璃前边缘走完接收单元1,到达翻转输送单元2之前,翻转输送单元2要完成翻转动作,翻转至5度位置,以使玻璃可以顺利进入翻转单元2。
32.当玻璃进入第一个翻转输送单元2时,第二个翻转输送单元2翻至5度位置,用于接收输送来的玻璃。翻转输送单元2宽度需要满足当玻璃进入第一个翻转输送单元2时,第二个翻转输送单元2由水平位置翻至5度位置所需时间,小于玻璃在第一个翻转输送单元2上的运行时间。即当玻璃进入第一个翻转输送单元2时,第二个翻转输送单元2由水平位置开始动作,当玻璃前边缘走完第一个翻转输送单元2,到达第二个翻转输送单元2之前,第二个翻转输送单元2要完成翻转动作,翻转至5度位置,以使玻璃可以顺利进入第二个翻转输送单元2。
33.当玻璃完全进入翻转输送单元2以后,6组翻转输送单元2同时动作,翻转至水平位置。翻转时需要玻璃板完全处于翻转输送单元2位置上,需要6组翻转输送单元2总长度大于玻璃板长度,才能顺利完成翻转动作。翻转至水平位置后,玻璃板进入输出单元3,然后水平状态输出。
34.当玻璃后边缘离开上一翻转输送单元2时,上一翻转输送单元2可以接着动作,由水平位置翻转至5度位置,不必等玻璃完全离开翻转设备,大大提高了翻转输送效率。
35.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。