一种基于doa聚类算法的被动雷达抗有源诱偏方法
技术领域
1.本发明涉及测量测试技术领域,具体涉及一种基于doa聚类算法的被动雷达抗有源诱偏方法。
背景技术:
2.被动雷达能够对有源非合作目标(如地面探测雷达、通信站等)进行目标探测和信号获取,是极为重要的一种目标探测手段,具有很强的反侦察、抗干扰、抗硬杀伤以及隐身目标和低空、超低空突防目标探测能力,较好的弥补了有源雷达的不足。由于自身不带有电磁波辐射源,所以具有非常强大的反侦察能力,对于隐身目标的探测能力比一般的有源雷达更强大。基于到达信号的前沿部分的角度估计,可提取出到时间参差的闪烁诱饵与目标信息,在获取有源诱偏角度信息的基础上,可以从中聚类并分选出较为孤立的目标。
3.许端,董文锋,周武,aruav前沿判别法抗多点源诱偏性能研究,指挥控制与仿真,2012,vol.34,no.4.4,pp.406-423。该文献中提出了反辐射无人机(aruav)使用基于小波变换的前沿跟踪技术用于对抗多点源诱偏系统,有效对抗两点源诱偏系统,并由固定波门得到了有效的判别空域。该方法对前沿单一信号的时长要求较高,当单信号暴露时长较短时,有效判别空域较少。
4.戴幻尧,王建路,李德申,一种被动雷达导引头对雷达和诱饵干扰的识别方法,2020,cn202010736721.4。该专利提出了一种通过极化-方位联合图谱特征,确定诱饵干扰的存在,利用极化-方位联合图谱估计和干扰识别算法,确定目标雷达和诱饵干扰角度信息。该方法对系统计算能力要求高,多维度计算时间长,实时性不高。
技术实现要素:
5.本发明是为了解决被动雷达抗有源诱偏的效率问题,提供一种基于doa聚类算法的被动雷达抗有源诱偏方法,采用对接收信号的功率及相位差跳变判断是否存在多个辐射源目标,使用实时doa估计、ddc聚类和重频稳定性计算,使计算结果精确。本发明可准确的判定当前环境下是否存在有源诱偏,实时性高,算法复杂度低,能够实现对有源诱偏系统目标的识别与判定,实现机载/弹载被动雷达对地面固定位置辐射源目标测向与识别。
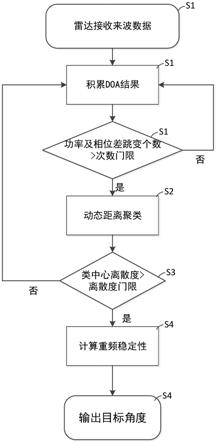
6.本发明提供一种基于doa聚类算法的被动雷达抗有源诱偏方法,包括以下步骤:
7.s1、根据被动雷达接收信号的功率和相位差跳变判断是否存在多个辐射源目标,如果是,进行doa估计得到测角结果xi,测角结果xi为并进入步骤s2;如果否,继续接收信号;
8.s2、对测角结果进行积累得到测角结果样本集x并进行ddc聚类,得到聚类结果,聚类结果为全部类,全部类为z1,z2,l zq;
9.s3、对类的中心离散度是否大于门限进行判定,如果是,进入步骤s4,如果否,返回步骤s1;
10.s4、对聚类结果进行重频稳定性计算,得到目标角度。
11.本发明所述的一种基于doa聚类算法的被动雷达抗有源诱偏方法,作为优选方式,步骤s1包括以下步骤:
12.s11、计算被动雷达两路天线接收信号s
x
(t)、s
x 1
(t)的相位差以及天线接收信号s
x
(t)与s
x 1
(t)前沿部分预设时间阈值内的采样点数据s
x
(m)、s
x 1
(m)的相位差使与取差得到相位差δφ,其中,x=1,...,x,x初始化为1,t=1,λ,t;m=1,λ,m;m=t;
13.s12、计算天线接收信号s
x
(t)的平均幅度a
t
、采样点数据s
x
(m)的平均幅度am,将a
t
与am取差得到幅度差δa;
14.s13、判断相位差δφ的差超过60
°
、幅度差δa的差超过3db的次数累加是否大于预设次数阈值,如果是,则存在多个辐射源目标,进入步骤s14;如果否,则x=x 1,返回步骤s11;
15.s14、对各路天线接收信号s
x
(t)进行doa估计,得到测角结果xi,被动雷达包括共计x路天线。
16.本发明所述的一种基于doa聚类算法的被动雷达抗有源诱偏方法,作为优选方式,步骤s11中,预设时间阈值的取值范围为10ns~500ns。
17.本发明所述的一种基于doa聚类算法的被动雷达抗有源诱偏方法,作为优选方式,步骤s13中,预设次数阈值的取值范围为3~10。
18.本发明所述的一种基于doa聚类算法的被动雷达抗有源诱偏方法,作为优选方式,步骤s2包括以下步骤:
19.s21、积累测角结果xi,得到测角结果样本集x,x={x1,x2,l,xn};
20.s22、使用极值标准化方法将测角结果样本集x归一化至0~1范围内得到归一化后待分选样本集;
21.s23、从归一化后待分选样本集中选出距离最远的两个样本矢量,两个样本矢量的距离为d,根据预设比例阈值和最远距离为d设定聚类门限λ,聚类门限λ为预设比例阈值乘以最远距离d;
22.s24、将归一化后待分选样本集中的第一个样本作为第一类的聚类中心z1,将与第一类的聚类中心z1的距离未超过门限λ的样本归入第一类,将与第一类的聚类中心z1的距离超过或等于门限λ的样本作为新的聚类中心;
23.s25、将元素个数小于预设数量阈值的类归并到邻近类中,得到全部类z1,z2,l zq,聚类完成。
24.本发明所述的一种基于doa聚类算法的被动雷达抗有源诱偏方法,作为优选方式,步骤s23中,预设比例阈值的取值范围为0.1~0.4。
25.本发明所述的一种基于doa聚类算法的被动雷达抗有源诱偏方法,作为优选方式,步骤s25中,预设数量阈值的取值范围为2~5。
26.本发明所述的一种基于doa聚类算法的被动雷达抗有源诱偏方法,作为优选方式,步骤s3包括以下步骤:
27.s31、计算全部类z1,z2,l zq的类中心oq,
[0028][0029]
s32、计算测角结果样本集x的质心o:
[0030]
其中,x={x1,x2,l,xn};
[0031]
s33、计算类中心的离散度的均值,类中心的离散度的均值为:
[0032]
如果类中心的离散度大于预设离散度阈值,则进入步骤s4,如果否,返回步骤s1。
[0033]
本发明所述的一种基于doa聚类算法的被动雷达抗有源诱偏方法,作为优选方式,步骤s33中,预设离散度阈值的取值范围为3~6。
[0034]
本发明所述的一种基于doa聚类算法的被动雷达抗有源诱偏方法,作为优选方式,步骤s4包括以下步骤:
[0035]
s41、提取聚类结果中的toa,计算不同类中toa之差;
[0036]
s42、计算toa之差的标准差,标准差最小的类为目标角度。
[0037]
本发明的技术方案为:一种基于doa聚类算法的被动雷达抗有源诱偏方法,步骤如下:
[0038]
1)通过对接收信号的功率及相位差跳变,判断是否存在多个辐射源目标,并进行doa(来波方向)估计;
[0039]
2)一段时间内,对步骤1)中doa估计的角度结果积累并进行ddc聚类;
[0040]
3)对步骤2)中聚类结果进行判定,全部类中心的离散度是否大于门限,当满足判定门限要求时进入步骤4);
[0041]
4)对步骤3)中得到的聚类结果进行重频稳定性计算,输出目标角度。
[0042]
步骤1)中对接收信号的功率及相位差跳变,及doa估计具体通过如下步骤:
[0043]
1.1)取两路天线接收信号s1(t)与s2(t),t=1,...,t;取信号的前沿部分中,预设时间阈值内的采样点数据s1(m)与s2(m),m=1,...,m,其中m=t,s1(t)与s2(t)取相位差s1(m)与s2(m)取相位差与去相位差的差δφ;
[0044]
1.2)取天线接收信号s1(t)的平均幅度a
t
,s1(m)的平均幅度an,a
t
与an取幅度差δa;
[0045]
1.3)重复步骤2.1)至2.2)k次,当k个相位差δφ与k个幅度差δa中,相位差的差超过60
°
与幅度差的差超过3db的个数累加,大于预设次数阈值,进入步骤1.4);
[0046]
1.4)对各路天线接收信号s
x
(m),m=1,...,m,x=1,...,x,其中x=1,...,x为x路天线,进行doa估计,得到角度
[0047]
步骤2)中doa估计的角度结果积累并进行动态距离聚类,具体通过如下步骤进行:
[0048]
2.1)积累1.4)处理后的测角结果有n个样本x={x1,x2,l,xn};
[0049]
2.2)采用极值标准化方法将2.1)中样本归一化至0~1范围内;
[0050]
2.3)对步骤2.2)处理得到归一化后待分选样本集,选出距离最远的两个样本矢
量,聚类门限λ与最远距离d之比为预设比例阈值;
[0051]
2.4)对于步骤2.2)处理得到归一化后待分选样本集,第一个样本作为聚类中心z1,与距离中心距离均未过门限λ的样本归入最近的类,否则,作为新的聚类中心;
[0052]
2.5)将类中元素个数小于预设数量阈值的类归并到邻近类中,得到全部类z1,z2,l zq,完成整个聚类过程。
[0053]
步骤3)中全部类中心的离散度判定具体如下步骤:
[0054]
3.1)对于2.5)中聚类结果z1,z2,l zq,
[0055]
对应类中心
[0056]
3.2)计算全部样本x={x1,x2,l,xn}的质心
[0057]
3.3)计算的均值,为类中心的离散度,若其大于预设离散度阈值,则进入步骤4)。
[0058]
将步骤3.3)中聚类结果进行重频稳定性计算,输出目标角度。
[0059]
具体如下步骤:
[0060]
4.1)对于3.3)中各类,提取各类中信号到达时间(toa),计算不同类中toa之差。
[0061]
4.2)对于3.1)中toa之差,计算标准差,输出标准差最小类作为目标角度。
[0062]
其中,doa为来波到达方向,toa为信号到达时间。
[0063]
本发明具有以下优点:
[0064]
(1)本发明采用对接收信号的功率及相位差跳变,判断是否存在多个辐射源目标,可准确的判定当前环境下是否存在有源诱偏。
[0065]
(2)本发明方案的实时性高,算法复杂度低,是较为实用的被动雷达抗有源诱偏方法,机载/弹载被动雷达对地面固定位置辐射源目标测向与识别。
[0066]
(3)机载/弹载被动雷达接收地面辐射源目标,并进行实时doa估计与聚类,通过对doa聚类结果的处理,能够实现对有源诱偏系统目标的识别与判定。
附图说明
[0067]
图1为一种基于doa聚类算法的被动雷达抗有源诱偏方法流程图;
[0068]
图2a为一种基于doa聚类算法的被动雷达抗有源诱偏方法不存在诱偏源情况下的接收信号幅度示意图;
[0069]
图2b为一种基于doa聚类算法的被动雷达抗有源诱偏方法不存在诱偏源情况下的接收信号相位差示意图;
[0070]
图3a为一种基于doa聚类算法的被动雷达抗有源诱偏方法存在诱偏源情况下的接收信号幅度与相位差图像;
[0071]
图3b为一种基于doa聚类算法的被动雷达抗有源诱偏方法存在诱偏源情况下的接收信号幅度与相位差图像;
[0072]
图4为一种基于doa聚类算法的被动雷达抗有源诱偏方法多个样本积累的测角结
果图像;
[0073]
图5为一种基于doa聚类算法的被动雷达抗有源诱偏方法动态距离聚类后图像;
[0074]
图6为一种基于doa聚类算法的被动雷达抗有源诱偏方法类中心的离散度小于预设离散度阈值的聚类结果图像;
[0075]
图7为一种基于doa聚类算法的被动雷达抗有源诱偏方法类中心的离散度大于预设离散度阈值的聚类结果图像;
[0076]
图8为一种基于doa聚类算法的被动雷达抗有源诱偏方法4个类的标准差计算结果示意图。
具体实施方式
[0077]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
[0078]
实施例1
[0079]
如图1所示,一种基于doa聚类算法的被动雷达抗有源诱偏方法,其特征在于:包括以下步骤:
[0080]
s1、根据被动雷达接收信号的功率和相位差跳变判断是否存在多个辐射源目标,如果是,进行doa估计得到测角结果xi,测角结果xi为并进入步骤s2;如果否,继续接收信号;
[0081]
s11、计算被动雷达两路天线接收信号s
x
(t)、s
x 1
(t)的相位差以及天线接收信号s
x
(t)与s
x 1
(t)前沿部分预设时间阈值内的采样点数据s
x
(m)、s
x 1
(m)的相位差使与取差得到相位差δφ,其中,x=1,...,x,x初始化为1,t=1,λ,t;m=1,λ,m;m=t;
[0082]
s12、计算天线接收信号s
x
(t)的平均幅度a
t
、采样点数据s
x
(m)的平均幅度am,将a
t
与am取差得到幅度差δa;
[0083]
s13、判断相位差δφ的差超过60
°
、幅度差δa的差超过3db的次数累加是否大于预设次数阈值,如果是,则存在多个辐射源目标,进入步骤s14;如果否,则x=x 1,返回步骤s11;
[0084]
s14、对各路天线接收信号s
x
(t)进行doa估计,得到测角结果xi,被动雷达包括共计x路天线;
[0085]
预设时间阈值的取值范围为10ns~500ns;
[0086]
预设次数阈值的取值范围为3~10;
[0087]
s2、对测角结果进行积累得到测角结果样本集x并进行ddc聚类,得到聚类结果,聚类结果为全部类,全部类为z1,z2,l zq;
[0088]
s21、积累测角结果xi,得到测角结果样本集x,x={x1,x2,l,xn};
[0089]
s22、使用极值标准化方法将测角结果样本集x归一化至0~1范围内得到归一化后待分选样本集;
[0090]
s23、从归一化后待分选样本集中选出距离最远的两个样本矢量,两个样本矢量的距离为d,根据预设比例阈值和最远距离为d设定聚类门限λ,聚类门限λ为预设比例阈值乘
以最远距离d;预设比例阈值的取值范围为0.1~0.4;
[0091]
s24、将归一化后待分选样本集中的第一个样本作为第一类的聚类中心z1,将与第一类的聚类中心z1的距离未超过门限λ的样本归入第一类,将与第一类的聚类中心z1的距离超过或等于门限λ的样本作为新的聚类中心;
[0092]
s25、将元素个数小于预设数量阈值的类归并到邻近类中,得到全部类z1,z2,l zq,聚类完成;预设数量阈值的取值范围为2~5;
[0093]
s3、对类的中心离散度是否大于门限进行判定,如果是,进入步骤s4,如果否,返回步骤s1;s31、计算全部类z1,z2,l zq的类中心oq,
[0094][0095]
s32、计算测角结果样本集x的质心o:
[0096]
其中,x={x1,x2,l,xn};
[0097]
s33、计算类中心的离散度的均值,类中心的离散度的均值为:
[0098]
如果类中心的离散度大于预设离散度阈值,则进入步骤s4,如果否,返回步骤s1;预设离散度阈值的取值范围为3~6;
[0099]
s4、对聚类结果进行重频稳定性计算,得到目标角度;
[0100]
s41、提取聚类结果中的toa,计算不同类中toa之差;
[0101]
s42、计算toa之差的标准差,标准差最小的类为目标角度。
[0102]
实施例2
[0103]
如图1所示,一种基于doa聚类算法的被动雷达抗有源诱偏方法,步骤如下:
[0104]
(1)通过对接收信号的功率及相位差跳变,判断是否存在多个辐射源目标,并进行doa(来波方向)估计;
[0105]
对接收信号的功率及相位差跳变,及doa估计具体通过如下步骤:
[0106]
(1.1)取两路天线接收信号s1(t)与s2(t),t=1,...,t;取信号的前沿部分中,预设时间阈值(这里取10ns~500ns)内的采样点数据s1(m)与s2(m),m=1,...,m,其中m=t,s1(t)与s2(t)取相位差s1(m)与s2(m)取相位差与去相位差的差δφ;
[0107]
(1.2)取天线接收信号s1(t)的平均幅度a
t
,s1(m)的平均幅度an,a
t
与an取幅度差δa;
[0108]
(1.3)重复步骤(1.1)至(1.2)k次,当k个相位差的差δφ与k个幅度差的差δa中,相位差的差超过60
°
与幅度差的差超过3db的个数累加,大于预设次数阈值(这里取3~10),进入步骤(1.4);
[0109]
(1.4)对各路天线接收信号s
x
(m),m=1,...,m,x=1,...,x,其中x=1,...,x为x路天线,进行doa估计,得到角度
[0110]
对于不同的地面目标、不同的角度分辨率、被动雷达与目标的距离,设置的阈值是
不同的。例如,对于高分辨率被动雷达,其中频采样频率可达100mhz左右,10ns时间内即可获得一组角度估计结果。图2a、2b为不存在诱偏源情况下的接收信号幅度与相位差;图3为存在存在诱偏源情况下的接收信号幅度与相位差,对比可以明显的看出图3a、3b中相位差波动与幅度差波动。依据这个特点,对信号前沿部分进行截取,设定时间阈值,取值范围10~500ns。
[0111]
(2)一段时间内,对步骤(1)中doa估计的角度结果积累并进行动态距离聚类;
[0112]
积累doa估计的角度结果并进行动态距离聚类,具体通过如下步骤进行:
[0113]
(2.1)积累(1.4)处理后的测角结果有n个样本x={x1,x2,l,xn};
[0114]
(2.2)采用极值标准化方法将(2.1)中样本归一化至0~1范围内;
[0115]
(2.3)对步骤(2.2)处理得到归一化后待分选样本集,选出距离最远的两个样本矢量,聚类门限λ与最远距离d之比为预设比例阈值(这里取0.1~0.4);
[0116]
(2.4)对于步骤(2.2)处理得到归一化后待分选样本集,第一个样本作为聚类中心z1,与聚类中心距离均未过门限λ的样本归入最近的类,否则,作为新的聚类中心;
[0117]
(2.5)将类中元素个数小于预设数量阈值(这里取2~5)的类归并到邻近类中,得到全部类z1,z2,l zq,完成整个聚类过程。
[0118]
图4为一段时间内,多个样本积累的测角结果,对其进行动态距离聚类,结果如图5所示,可以明显看出,聚类后存在4个类,当前有4个不同角度的辐射源目标。
[0119]
(3)对步骤(2)中聚类结果进行判定,全部类中心的离散度是否大于门限,当满足判定门限要求时进入步骤(4);
[0120]
全部类中心的离散度判定具体如下步骤:
[0121]
(3.1)对于(2.5)中聚类结果z1,z2,l zq,对应类中心
[0122]
(3.2)计算全部样本x={x1,x2,l,xn}的质心
[0123]
(3.3)计算的均值,为类中心的离散度,若其大于预设离散度阈值(这里取3~6),则进入步骤(4);否则,重复(2.1)~(3.3)直至类中心的离散度大于预设离散度阈值,进入步骤(4)。
[0124]
图6为类中心的离散度小于预设离散度阈值的聚类结果,由于辐射源目标间的距离小于角度分辨率,不能对多个目标的角度进行分辨;图7为类中心的离散度大于预设离散度阈值的聚类结果,经过被动雷达空间位置的改变,此时可以对不同目标进行角度分辨。
[0125]
(4)对步骤(3)中得到的聚类结果进行聚类结果进行重频稳定性计算,输出目标角度;
[0126]
目标点判定具体通过如下步骤进行:
[0127]
(4.1)对步骤(3)中得到的聚类结果,提取各类中信号到达时间(toa),计算不同类中toa之差,对应计算结果为:
[0128]
δtoa1n=toa1
n-toa1
n-1
=pri1 ω1n δr[0129]
δtoa2n=toa2
n-toa2
n-1
=pri2 ω2n δr[0130]
δtoa3n=toa3
n-toa3
n-1
=pri3 ω3n δr[0131]
δtoa4n=toa4
n-toa4
n-1
=pri4 ω4n δr[0132]
其中prii为目标的重频,ωin为目标prii的误差,δr为被动雷达接收机的测量误差;
[0133]
(4.2)对步骤(4.1)中得到各类的toa之差进行标准差计算,将标准差最小的类作为目标角度输出。
[0134]
图8为4个类的标准差计算结果示意图,类2做为选定的目标输出。
[0135]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。