技术特征:
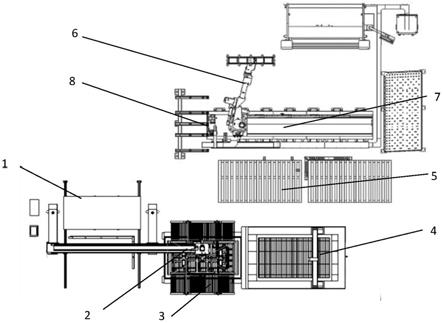
1.一种板材自动切割折弯焊接设备,其特征在于,包括板材来料库(1)、第一搬运机械手(2)、激光切割机器人(4)和折弯机器人(6),两个移栽工作台(3)分别设置在所述激光切割机器人(4)下方、其一侧,所述第一搬运机械手(2)包括第一搬运机器人本体和第一搬运抓手,所述第一搬运抓手包括抓手安装基体框(202)、吸取机构和抓取机构,所述抓手安装基体框(202)上部与第一搬运机器人本体的末端法兰通过抓手连接杆(201)以相连,所述吸取机构安装在抓手安装基体框(202)下部,所述抓取机构设置在抓手安装基体框(202)上部且位于所述吸取机构的两侧,吸取机构位于两侧抓取机构的内部,所述第一搬运机械手本体带动吸取机构从板材来料库(1)中吸取板材放置到位于激光切割机器人(4)外侧的移栽工作台(3)上,所述移栽工作台(3)带动板材到激光切割机器人(4)的正下方,所述激光切割机器人(4)对板材进行切割,所述移栽工作台(3)带动切割完成的板材回位,两侧的所述抓取机构相互靠近从板材的两侧抓取物料,中转平台(5)放置在移栽工作台(3)和折弯机器人(6)之间,所述第一搬运机械手本体带动抓取机构从激光切割机器人(4)外侧的移栽平台抓取切割后的板材,第一搬运机械手本体带动抓取机构从放置切割完成板材的移栽工作台(3)搬运切割完成板材放置到中转平台(5)上,所述折弯机器人(6)布置在中转平台(5)与折弯机之间,所述折弯机器人(6)用于从中转平台(5)搬运切割后的成品送入折弯机进行折弯,第一搬运机器人本体带动抓取机构从中转平台(5)上抓取板材余料放置到余料回收箱中,焊接中转架(8)布置在折弯机器人(6)的一侧,折弯机器人(6)将折弯后的成品放置到焊接中转架(8)中,多个焊接工装台(9)布置在焊接机器人(10)的四周,焊接机器人(10)对定位在焊接工装台(9)上的折弯成品进行焊接。2.根据权利要求1所述的板材自动切割折弯焊接设备,其特征在于,所述第一搬运抓手还包括分层机构,所述分层机构设置在所述抓手安装基体框(202)的一端且位于所述吸取机构的一侧,所述分层机构和所述抓取机构位于抓手安装基体框(202)的相邻两侧,所述分层机构用于带动板材一边翘起从而与其下方的板材分离。3.根据权利要求2所述的板材自动切割折弯焊接设备,其特征在于,所述分层机构包括转动杆(208),所述转动杆(208)的一侧铰接在所述抓手安装基体框(202)的外端,多个吸取单元均布在转动杆(208),转动机构(206)带动转动杆(208)相对所述抓手安装基体框(202)转动。4.根据权利要求3所述的板材自动切割折弯焊接设备,其特征在于,所述转动机构(206)包括第一直行气缸(262),所述第一直行气缸(262)远离其缸杆的一端铰接在所述抓手安装基体框(202)的上端面,所述第一直行气缸(262)水平设置且朝向转动杆(208)设置,气缸铰接头(263)的一端与所述第一直行气缸(262)缸杆的外端固连,转动连接杆(261)上端与气缸铰接头(263)铰接,所述转动连接杆(261)下端与所述转动杆(208)的上端固连。5.根据权利要求3或者4所述的板材自动切割折弯焊接设备,其特征在于,所述第一搬运抓手还包括测厚机构(209),所述测厚机构(209)与分层机构布置在抓手安装基体框(202)的同侧,当吸取机构吸取板材后,所述测厚机构(209)用于对板材进行厚度测量;所述测厚机构(209)包括第二直行气缸(291),所述第二直行气缸(291)安装在所述转动杆(208)的上端面,所述第二直行气缸(291)水平设置且朝向转动杆(208)设置,第三直行气缸(292)竖直向下设置,所述第三直行气缸(292)的缸体安装在第二直行气缸(291)的缸杆上,滑动连接板(293)与第三直行气缸(292)的缸杆固连,第四直行气缸(294)竖直设置且其缸杆与
滑动连接板(293)固连,接触式测厚仪(295)与第四直行气缸(294)的缸体固连。6.根据权利要求1所述的板材自动切割折弯焊接设备,其特征在于,所述抓取机构包括移动连接杆(204),移动连接杆(204)的下端面滑动设置在抓手连接框的上端面,移动连接杆(204)水平设置且其一端伸出抓手安装基体框(202),连接竖杆的上下两端分别与移动连接杆(204)、插齿连接杆固连,多个插齿(205)均布在插齿连接杆上且朝向另一侧的抓取机构设置。7.根据权利要求6所述的板材自动切割折弯焊接设备,其特征在于,所述抓取机构还包括挡齿板(207),两个抓取机构的挡齿板(207)均布置在所述吸取机构相邻的两侧且位于两侧抓取机构的内部,所述挡齿板(207)下部沿插齿(205)的运动方向开有用于插齿(205)穿过的通槽。8.根据权利要求1所述的板材自动切割折弯焊接设备,其特征在于,所述折弯机器人(6)包括六轴串联机器人本体和折弯夹持部,所述折弯夹持部采用吸盘吸取板材端面。9.根据权利要求1所述的板材自动切割折弯焊接设备,其特征在于,所述焊接工装台(9)采用人工上料,人工从焊接中转架(8)中拾取折弯后的成品放置到焊接定位工装台,人工退出后,焊接机器人(10)对焊接工装台(9)的折弯件进行焊接。
技术总结
本实用新型公开了一种板材自动切割折弯焊接设备,属于自动化加工设备技术领域,包括第一搬运机器人本体和第一搬运抓手,抓手安装基体框上部与第一搬运机器人本体的末端法兰上,吸取机构安装在抓手安装基体框下部,抓取机构分别位于吸取机构的两侧,吸取机构从板材来料库中吸取板材放置到移栽工作台上,移栽工作台将板材送入激光切割机器人进行加工,两侧抓取机构相互靠近抓取切割后的板材放置到中转平台上,折弯机器人用于从中转平台搬运切割后的成品送入折弯机进行折弯,然后将折弯后的成品放置到焊接中转架中,焊接机器人对定位在焊接工装台上的折弯成品进行焊接。该设备能够实现板材自动切割、折弯、焊接,生产连续性高。生产连续性高。生产连续性高。
技术研发人员:王璐 盛乾超 孟瑞 汪超 谢能刚
受保护的技术使用者:马鞍山市安工大智能装备技术研究院有限公司
技术研发日:2021.07.16
技术公布日:2022/5/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。