1.本说明书涉及一种用于扫描容器的扫描系统和方法,并且具体地说,涉及用于扫描大、高和/或位于高空中的容器的扫描系统和方法。容器的示例包括工业化工容器,诸如工业化工场所的塔和罐,例如蒸馏塔、储罐、分离器容器等。
背景技术:
2.已知使用称为伽马扫描的技术对工业化工容器(诸如石化场所的蒸馏塔)进行扫描。在此技术中,发射伽马辐射的放射性同位素和检测器下降到塔的两个相对侧,以测量塔内各种不同高度处的密度。伽马辐射通过塔从塔的一侧上的放射源传输到塔的相对侧上的检测器。在通过塔时伽马辐射的衰减取决于辐射通过的材料的密度。因此,可以生成塔的密度分布,并且这可以用于诊断塔和/或在塔中操作的过程的问题而不必打开塔和/或停止该过程。例如,可以识别在多层流体柱中具有不同密度的不同流体层的位置,包括例如固相、水相、乳相、油相和/或气相层。对于某些化学过程,需要在塔内的特定高度处维持流体表面或界面。伽马扫描技术允许询问塔的内部以确定正确的操作条件和/或诊断塔中的问题。
3.当前,通过在绞盘系统上沿着塔降低源和检测器来执行伽马扫描。这需要两个现场工程师爬上塔,并且在高处作业以安装和操作绞盘系统。这也需要向塔提供合适的梯子和用于现场工程师安装和操作伽马扫描设备的通道。
4.作为使用一致地沿塔向下移动以测量塔的密度分布的单个辐射源和检测器的替代方案,可以提供放射源和检测器的阵列,其在塔的相对侧上向下延伸,以提供沿塔的固定位置处的源/检测器对。为了获得所需的测量精度,此类系统采用准直设计,其确保每个源/检测器对聚焦在特定高度处。以此方式,可以以与扫描方法类似的方式生成塔的密度分布。然而,此系统需要将辐射源和检测器阵列安装到塔上,这再次是劳动密集的并且涉及高空作业的现场工程师。
5.此类设备可以周期性地安装和操作以监测塔,或者该设备可以在塔内出现问题需要诊断时进行安装和操作。如前所述,这是劳动密集的并且涉及高空作业的现场工程师。作为替代方案,该设备可以永久安装在塔上,但是这是昂贵的,并且该设备可能仍需要定期维护,需要现场工程师在高空作业。此外,在场所处永久性地安装辐射源从监管和安全的角度来看可能是不可行的。
6.除了如上所述的塔上的密度分布测量之外,还已知要进行塔的计算机断层扫描(ct)伽马扫描测量。ct伽马扫描涉及将辐射源定位在塔的一侧上且检测器定位在塔的另一侧上。然后将源和检测器围绕塔的圆周移动,从而在塔周围的多个径向方向上进行测量。然后,重建模型采取该信息并使用其生成塔在该位置的准确图像。这具有生成密度图的优点,所述密度图可以提供关于塔壁厚度和完整性、产品流动状况和施加到塔的任何涂层的状况的信息。可以在沿塔的多个高度处执行ct扫描,以构建塔内部的三维图片。这种ct伽马扫描技术是极其劳动密集的,并且涉及在高空作业以安装和操作设备的现场工程师。
7.本说明书的目的是提供一种用于扫描诸如工业化学塔的容器的改进的系统和方
法。
技术实现要素:
8.本发明人已经识别出用于如背景部分中所阐述地扫描高/大工业化工容器的其现有技术的问题。为了解决这些问题,本说明书提供了一种用于扫描容器的系统,所述系统包括:
9.第一无人驾驶飞行器(uav),所述第一uav承载辐射源;
10.第二uav,所述第二uav承载辐射检测器;
11.和控制器,所述控制器被配置为以协调方式移动所述第一uav和所述第二uav,以便通过使辐射穿过所述容器从由所述第一uav承载的所述辐射源到由所述第二uav承载的所述辐射检测器来扫描所述容器。
12.这种系统利用uav(无人机)技术在现在uav可被控制的精度方面的发展,并且使用该技术解决使用辐射源和检测器扫描高/大容器/塔的现有技术的特定问题。新系统的优点很多,并且包括:
13.安全:两人不必爬上塔并进行高空作业。
14.通道:可以扫描没有梯子和通道的塔。
15.ct扫描:尽管ct扫描技术已经在化学塔上使用,但它们极度劳动密集,并且涉及更复杂的高空作业。uav可以简单地围绕塔在任何所需高度处旋转。
16.速度:当不需要安装绞盘设备时,可以更快地扫描塔。
17.人力:可以使用一个现场工程师来扫描塔,而不是当前所需的两个。
18.如本文所述的系统可以用于扫描一系列不同类型的容器,但特别适合于扫描工业化工容器,诸如工业化工场所的塔和罐,例如蒸馏塔、储罐、分离器容器等。提供了一种扫描此类容器的方法,所述方法包括:
19.将所述第一uav定位在所述容器的一侧;
20.将所述第二uav定位在所述容器的相对侧;
21.以协调方式移动所述第一uav和所述第二uav,以便通过使辐射穿过所述容器从由所述第一uav承载的所述辐射源到由所述第二uav承载的所述辐射检测器来扫描所述容器。
22.特别地,本说明书提供了一种扫描工业化工容器以监测工业化工容器内的化学过程的方法,所述方法包括:
23.将承载伽马辐射源的第一无人驾驶飞行器(uav)定位在所述容器的一侧;
24.将承载伽马辐射检测器的第二uav定位在所述容器的相对侧;
25.以协调方式移动所述第一uav和所述第二uav以便通过使伽马辐射穿过所述容器从由所述第一uav承载的所述辐射源到由所述第二uav承载的所述辐射检测器来扫描所述容器,由此测量所述工业化工容器的密度分布;
26.识别所述工业化工容器内一个或多个流体层的位置;以及
27.基于使用所述第一uav和所述第二uav识别的所述工业化工容器内所述一个或多个流体层的所述位置来确定所述工业化工容器内的化学过程是否正确运行或所述工业化工容器内的所述化学过程是否存在问题。
附图说明
28.为了更好地理解本发明并且示出其可如何实施,现在将参考附图仅通过举例的方式描述本发明的某些实施方案,其中:
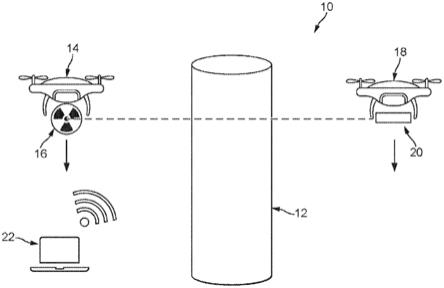
29.图1示出了执行塔的密度分布扫描的uav扫描系统;并且
30.图2示出了执行塔的ct扫描的uav扫描系统。
具体实施方式
31.如概述部分中所描述,并且如图1所示,本说明书提供了用于扫描容器12的系统10,系统10包括:承载辐射源16的第一uav 14;承载辐射检测器20的第二uav 18;和控制器22,其被配置为以协调方式移动第一uav 14和第二uav 18,以便通过使辐射穿过容器12从由第一uav 14承载的辐射源16到由第二uav 18承载的辐射检测器20来扫描容器12。
32.控制器被配置为在容器被扫描时维持第一uav与第二uav之间的固定距离。除了辐射穿过的材料的密度之外,源和检测器之间的辐射衰减还取决于源和检测器之间的距离。因此,通过将控制器配置为维持uav之间的固定距离,则减少或消除由路径长度变化产生的辐射数据的变化。作为替代方案或另外,该系统可以被配置为通过使用来自uav的位置数据来针对扫描期间uav之间的路径长度变化校正辐射数据,以检测和考虑路径长度的任何变化。
33.扫描容器的方法包括:将所述第一uav定位在所述容器的一侧;将所述第二uav定位在所述容器的相对侧;以协调方式移动所述第一uav和所述第二uav,以便通过使辐射穿过所述容器从由所述第一uav承载的所述辐射源到由所述第二uav承载的所述辐射检测器来扫描所述容器。uav的移动方式以及进行的辐射测量的数量和位置可以根据要执行的扫描类型而变化。计算机可用于控制两个uav,从而执行预定义飞行计划,并确保uav在相对于彼此的高度和定位方面保持同步。已经存在用于计划和执行uav飞行的软件。在本系统中,飞行计划应该被设计并与对辐射测量的控制同步,以实施所需的扫描方法。如下所论述,图1和2中示出了两种不同的扫描方法。
34.在图1所示的布置中,控制器22被配置为在容器12的一侧定位第一uav 14并在容器12的相对侧定位第二uav 18,并且以协调方式使第一uav 14和第二uav 18两者沿着(向下)容器12移动,以便生成容器12的密度分布。在这种情况下,第一uav和第二uav定位在相同高度以进行测量,然后向下移动到第二高度以进行进一步的测量,以此类推。以此方式,可以映射容器的密度分布。这可以用于例如测量容器中液体的高度或多层柱中的层和界面的位置,包括例如固相、水相、乳相、油相和气相。
35.在图2所示的布置中,控制器被配置为在容器12的一侧定位第一uav14并在容器12的相对侧定位第二uav 18,并且以协调方式在容器12周围移动第一uav 14和第二uav 14,以便生成容器12的计算机断层扫描(ct)扫描。在这种情况下,uav围绕塔的圆周移动,从而在塔周围的多个径向方向上进行测量。然后,重建模型采取该信息并使用其生成塔在该位置的准确图像。这具有生成密度图的优点,所述密度图可以提供关于塔壁厚度和完整性、产品流动状况和施加到塔的任何涂层的状况的信息。可以在沿塔的多个高度处执行ct扫描,以构建塔内部的三维图片。此类ct伽马扫描技术先前已经是极其劳动密集的。这里描述的uav系统对于此类扫描是高度有利的。
36.第一uav和第二uav中的每一者包括一个或多个传感器,其用于测量和控制uav与容器的距离和/或距地面的高度。合适的传感器包括lidar传感器(光探测和测距)、激光测距仪和高度计以测量和控制uav与塔的距离和距地面的高度。传感器可用于校正两个uav之间的路径长度并监测uav的高度,使得高度数据可以与辐射数据同步以产生塔的密度分布。
37.辐射源可以是电离辐射源,诸如伽马辐射源,例如cs-137。x射线发生器也可用于产生辐射。由第一uav承载的辐射源可以设置在外壳中,所述外壳至少部分地将辐射源与其周围环境隔绝。外壳还可以包括准直器,以便将来自辐射源的辐射束引导向由第二uav承载的辐射检测器。在这种情况下,控制器被配置为在容器被扫描时对第一uav进行取向以将辐射束引导向由第二uav承载的辐射检测器。
38.作为安全措施,外壳还可以被配置为具有用于将辐射源完全密封在外壳内的闸板,并且该系统还可以包括安全关闭,使得在系统故障的情况下,闸板被关闭以将辐射源完全密封在外壳内。承载辐射源的uav或实际上两个uav也可以设置有系链,使得uav被拴系到地面并且不能飞行超出由系链的长度限定的范围。还可以提供屏蔽容器,用于容纳承载辐射源的uav。因此,可以从屏蔽容器部署uav以最小化人类与源的交互。
39.所述系统还包括用于处理来自所述检测器的辐射数据的数据处理器。实际上,控制器和数据处理器可以设置在附图中所示的相同计算机单元22中,所述计算机单元可以是膝上型计算机、平板电脑、智能电话或其它移动计算装置。然而,不一定是这种情况,并且设想控制器和数据处理单元可以设置在单独的装置中。
40.辐射检测器包括用于将辐射数据传输到数据处理器的数据链路。由第二uav承载的辐射检测器可以是电池操作的并且能够无线地传输数据。第一uav和第二uav中的一者或两者还可以设置有用于将位置数据传输到数据处理器的数据链路(例如,无线数据链路)。还可以使用相同的数据链路来传输辐射数据和uav位置数据两者。数据处理器被配置为使辐射数据和位置数据同步以生成扫描分布。
41.虽然如图1和2所示的系统包括承载辐射源的单个uav和承载辐射检测器的单个uav,但是如本文所述的系统不限于此配置。所述系统可以包括承载辐射源的多于一个uav和/或承载辐射检测器的多于一个uav。控制器被配置为以协调方式移动所有uav,以便通过使辐射穿过容器从辐射源到辐射检测器来扫描容器。在这种情况下,uav可以被配置成用于执行扫描的源检测器对。使用多个无人机可用于提高可以执行复杂扫描技术(诸如ct扫描)的速度。
42.使用前述系统,提供了一种扫描工业化工容器以监测工业化工容器内的化学过程的方法,所述方法包括:
43.将承载伽马辐射源的第一无人驾驶飞行器(uav)定位在所述容器的一侧;
44.将承载伽马辐射检测器的第二uav定位在所述容器的相对侧;
45.以协调方式移动所述第一uav和所述第二uav以便通过使伽马辐射穿过所述容器从由所述第一uav承载的所述辐射源到由所述第二uav承载的所述辐射检测器来扫描所述容器,由此测量所述工业化工容器的密度分布;
46.识别所述工业化工容器内一个或多个流体层的位置;以及
47.基于使用所述第一uav和所述第二uav识别的所述工业化工容器内所述一个或多个流体层的所述位置来确定所述工业化工容器内的化学过程是否正确运行或所述工业化
工容器内的所述化学过程是否存在问题。
48.虽然已参考某些示例具体示出和描述了本发明,但本领域的技术人员应当理解,在不脱离由所附权利要求书限定的本发明范围的情况下,可以对形式和细节进行各种改变。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。