技术特征:
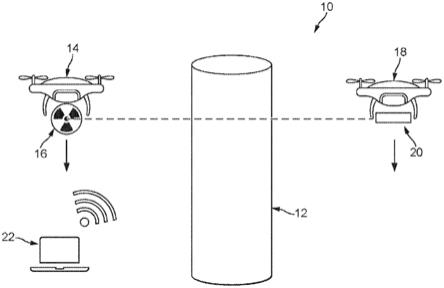
1.一种扫描工业化工容器以监测所述工业化工容器内的化学过程的方法,所述方法包括:将承载伽马辐射源的第一无人驾驶飞行器(uav)定位在所述容器的一侧;将承载伽马辐射检测器的第二uav定位在所述容器的相对侧;以协调方式移动所述第一uav和所述第二uav以便通过使伽马辐射穿过所述容器从由所述第一uav承载的所述辐射源到由所述第二uav承载的所述辐射检测器来扫描所述容器,由此测量所述工业化工容器的密度分布;识别所述工业化工容器内一个或多个流体层的位置;以及基于使用所述第一uav和所述第二uav识别的所述工业化工容器内所述一个或多个流体层的所述位置来确定所述工业化工容器内的化学过程是否正确运行或所述工业化工容器内的所述化学过程是否存在问题。2.根据权利要求1所述的方法,其中控制所述第一uav和所述第二uav以在所述容器被扫描时维持所述第一uav与所述第二uav之间的固定距离。3.根据权利要求1或2所述的方法,其中控制所述第一uav和所述第二uav以将所述第一uav定位在所述容器的一侧并将所述第二uav定位在所述容器的相对侧,并且以协调方式沿着所述容器移动所述第一uav和所述第二uav两者,以便测量所述容器的所述密度分布。4.根据权利要求1至3中任一项所述的方法,其中控制所述第一uav和所述第二uav以将所述第一uav定位在所述容器的一侧并将所述第二uav定位在所述容器的相对侧,并且以协调方式使所述第一uav和所述第二uav两者围绕所述容器移动,以便生成所述容器的计算机断层扫描(ct)扫描。5.根据前述权利要求中任一项所述的方法,其中所述第一uav和所述第二uav中的每一者包括一个或多个传感器,所述一个或多个传感器用于测量和控制所述uav与所述容器的距离和距所述地面的高度。6.根据前述权利要求中任一项所述的方法,其中由所述第一uav承载的所述辐射源设置在外壳中,所述外壳至少部分地将所述辐射源与其周围环境隔绝。7.根据权利要求6所述的方法,其中所述外壳包括准直器,以便将来自所述辐射源的辐射束引导向由所述第二uav承载的所述辐射检测器,并且所述控制器被配置为在所述容器被扫描时对所述第一uav进行取向以将所述辐射束引导向由所述第二uav承载的所述辐射检测器。8.根据权利要求6或7所述的方法,其中所述外壳包括用于将所述辐射源完全密封在所述外壳内的闸板,并且提供安全关闭,使得在发生故障的情况下,所述闸板关闭以将所述辐射源完全密封在所述外壳内。9.根据前述权利要求中任一项所述的方法,其中提供数据处理器用于处理来自所述检测器的辐射数据。
10.根据权利要求9所述的方法,其中所述检测器包括用于将辐射数据传输到所述数据处理器的数据链路。11.根据权利要求9或10所述的方法,其中所述第一uav和所述第二uav中的一者或两者包括用于将位置数据传输到所述数据处理器的数据链路。12.根据权利要求9和10所述的方法,其中所述数据处理器被配置为使所述辐射数据和位置数据同步以生成扫描分布。13.根据前述权利要求中任一项所述的方法,其中提供了承载辐射源的多于一个uav和/或承载辐射检测器的多于一个uav,并且其中所述uav以协调方式移动,以便通过使辐射穿过所述容器从所述辐射源到所述辐射检测器来扫描所述容器。14.一种被配置为使用根据前述权利要求中任一项所述的方法扫描工业化工容器以监测所述工业化工容器内的化学过程的系统,所述系统包括:第一无人驾驶飞行器(uav),所述第一uav承载伽马辐射源;第二uav,所述第二uav承载伽马辐射检测器;控制器,所述控制器被配置为以协调方式移动所述第一uav和所述第二uav,以便通过使辐射穿过所述容器从由所述第一uav承载的所述辐射源到由所述第二uav承载的所述辐射检测器来扫描所述容器,由此测量所述工业化工容器的密度分布;和处理单元,所述处理单元用于基于所述密度分布测量结果来识别所述工业化工容器内一个或多个流体层的位置并且用于基于使用所述第一uav和所述第二uav识别的所述工业化工容器内所述一个或多个流体层的所述位置来确定所述工业化工容器内的化学过程是否正确运行或所述工业化工容器内的所述化学过程是否存在问题。
技术总结
本发明公开了一种扫描工业化工容器以监测该工业化工容器内的化学过程的方法,该方法包括:将承载伽马辐射源的第一无人驾驶飞行器(UAV)定位在该容器的一侧;将承载伽马辐射检测器的第二UAV定位在该容器的相对侧;以协调方式移动该第一UAV和该第二UAV以便通过使伽马辐射穿过该容器从由该第一UAV承载的该辐射源到由该第二UAV承载的该辐射检测器来扫描该容器,由此测量该工业化工容器的密度分布;识别该工业化工容器内一个或多个流体层的位置;以及基于使用该第一UAV和该第二UAV识别的该工业化工容器内该一个或多个流体层的该位置来确定该工业化工容器内的化学过程是否正确运行或该工业化工容器内的该化学过程是否存在问题。在问题。在问题。
技术研发人员:O
受保护的技术使用者:庄信万丰股份有限公司
技术研发日:2020.09.04
技术公布日:2022/5/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。