1.本发明涉及生成例如无人搬运机等到目的地为止的路径的路径生成装置。
背景技术:
2.以往,作为用于在酒店、工厂的生产线、物流仓库等使无人搬运机在作为目标的行驶路径中行驶的引导方式,例如,已知用搭载于无人搬运机的线圈检测从埋设于地板的电线发送的引导磁场的电磁引导方式、用光学传感器检测来自粘贴于地板面的反射带的反射光的光学方式等。
3.另一方面,作为不使用上述引导方式而对无人搬运机进行运行管理的方法,例如,提出了使其在作为目标的行驶路径中自动行驶而进行货物的卸货等的无人搬运车agv(automatic guided vehicle:自动引导车)。
4.在这样的无人搬运机的运行管理方法中,用户预先向无人搬运机输入搬运路径,从而进行到目的地为止的搬运等。另外,也利用通过使用a*(a-star)这样的路径生成的算法而生成到目的地为止的路径的方法。
5.在专利文献1中公开了移动装置沿着行驶路线在站之间移动,并在站之间搬运物品的搬运装置。这里,作为无人搬运机的移动装置在移动至目的地时从中继地点(存储介质)接收信息,并根据该信息沿路径前进。
6.在专利文献2中公开了在清扫对象表面上的自动自行式机器即机器人吸尘器的动作方法。这里,公开了如下技术:在清扫过程中,在清扫对象表面上隔开间隔地登记路线图节点,并在机器人吸尘器从先前登记的路线图节点到当前记录的路线图节点没有与障碍物碰撞或者没有检测到障碍物地驱动的情况下,连结路线图节点从而在路线图上形成路线图链路,由此使机器人吸尘器的导航变得容易。
7.现有技术文献
8.专利文献
9.专利文献1:日本特开2008-97500号公报
10.专利文献2:日本特表2018-500636号公报
技术实现要素:
11.发明要解决的课题
12.然而,在现有技术中,在用户向agv输入路径的情况下,如果该路径变得复杂,则信息量增大,并且用户侧的负担也增加。
13.另一方面,在使用作为路径生成算法的a*(a-star)的情况下,到生成路径为止可能需要非常多的时间。例如,存在设施越大,agv搜索到目的地为止的路程所需的时间越长的问题。
14.本发明是鉴于上述课题而完成的,其目的在于提供降低用户的负担,容易选定agv的最短路线的路径生成装置。
15.用于解决课题的手段
16.作为达成上述目的从而解决上述的课题的一个手段,本发明具有以下的结构。即,本技术的例示性的第一发明为路径生成装置,其生成移动体的路径,其特征在于,该路径生成装置具有如下单元:根据规定的地图信息而生成表示所述移动体的可侵入区域和不可侵入区域的地图信息的单元;根据所述生成的地图信息对所述可侵入区域与所述不可侵入区域的边界线应用规定的处理从而在所述边界线上设定所述移动体的中继地点的单元;距离计算单元,其根据连接了所述中继地点之间的线段的长度来计算中继地点之间的距离;以及根据所述中继地点以及所述中继地点之间的距离而生成从所述移动体的出发地到目的地的路径的单元。
17.本技术的例示性的第二发明为路径生成方法,其特征在于,该路径生成方法具有如下工序:根据规定的地图信息而生成表示移动体的可侵入区域和不可侵入区域的地图信息;根据所述生成的地图信息在所述可侵入区域与所述不可侵入区域的边界线上设置规定的间隔的点云;对提取所述点云中的连结规定的点云的直线所成的角度为一定值以上的点云而得到的角度信息进行计算;根据所述角度信息在所述不可侵入区域内设定所述移动体的中继地点;根据连接了所述中继地点之间的线段的长度来计算中继地点之间的距离;以及根据所述中继地点以及所述中继地点之间的距离而生成从所述移动体的出发地到目的地的路径。
18.发明效果
19.根据本发明,能够提供一种路径生成装置,其能够容易且迅速地搜索、决定到agv所移动的目的地为止的路径,从而即使可移动的地图信息变得复杂,也容易地设定中继地点,因此用户的负担不会增大。
附图说明
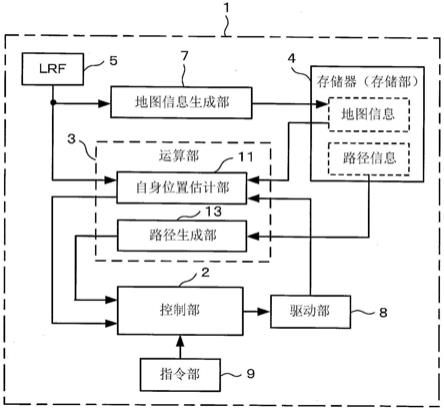
20.图1是示出本发明的第一实施方式的路径生成装置的结构的框图。
21.图2是示出在第一实施方式的路径生成装置中生成地图信息的过程的流程图。
22.图3是示出第一实施方式中的拐角提取处理过程的流程图。
23.图4a是根据由lidar取入的数据而生成的地图信息的一例。
24.图4b示出了对图4a所示的涂黑区域设定了不可侵入区域的例子。
25.图4c示出了提取的无人搬运车agv的通行路线。
26.图4d示出了根据角度信息提取出的拐角的一例。
27.图4e示出了将提取出的拐角汇集成一个的例子。
28.图4f示出了通过第一方法形成的路径的一例。
29.图4g示出了通过第二方法形成的路径的一例。
30.图5是示出基于点云所成的角度的拐角的提取方法的图。
31.图6是示出在第一实施方式中目的地被指定的agv中的路径决定过程的流程图。
32.图7是通过第一方法连接拐角之间而形成的agv的移动路径的一例。
33.图8是通过第二方法连接拐角之间而形成的agv的移动路径的一例。
34.图9是示出在本发明的第二实施方式的路径生成装置中生成地图信息的过程的流程图。
35.图10a是通过lidar而生成的地图信息的一例。
36.图10b示出了根据地图信息而生成的点云地图的例子。
37.图10c示出了进行了从点云地图仅保留一定的长度以上的线段的处理而得的结果。
38.图10d示出了提取的线段的端点的地图。
39.图10e是从各端点向最大打开的方向延伸出直线而生成的地图。
40.图10f是示出从除了判定为平面的端点以外的、被判别为锐角、钝角的端点伸出而提取的拐角的地图。
41.图10g是连接拐角之间时的地图。
42.图11示出了第二实施方式中的到目的地为止的agv的移动路径的一例。
43.图12是对变形例1的地图生成进行说明的图。
44.图13是对变形例2的不可侵入区域的设定进行说明的图。
具体实施方式
45.以下,参照附图对本发明的实施方式进行说明。
46.<第一实施方式>
47.图1是示出本发明的第一实施方式的路径生成装置的结构的框图。路径生成装置1作为移动体(无人搬运车agv),例如在酒店、物流仓库等设施中沿着从出发地到指定的目的地的行驶路径行驶。为此,路径生成装置1预先生成所行驶的场所(设施)的地图信息和路径信息。
48.如图1所示,路径生成装置1负责装置整体的控制,具有例如由微处理器构成的控制部2、运算部3、存储部(存储器)4、作为激光式的测距传感器的lrf(laser range finder:激光测距仪)5、生成行驶场所的地图信息的地图信息生成部7、以及驱动部8等。
49.运算部3具有自身位置估计部11和路径生成部13。在存储部(存储器)4中保存有地图信息、路径信息、用于生成地图信息和路径信息的程序、路径生成装置1的行驶控制程序等。
50.接着,对第一实施方式的路径生成装置中的地图信息和路径信息的生成方法进行说明。图2是按照时间序列示出了在第一实施方式的路径生成装置中生成地图信息的过程的流程图。
51.在图2的步骤s11中,路径生成装置1的控制部2例如使用lidar(light detection and ranging:光检测和测距)作为lrf,检测在酒店、物流仓库等设施中妨碍了无人搬运车agv(这里为路径生成装置1)的行驶的障碍物(例如,墙壁、柱子、货物等),并据此生成地图信息。
52.lidar是向设施这样的规定区域内的二维空间或三维空间射出激光,从而测定该区域内的多个测量点的距离的技术。
53.图4a是根据由lidar取入的数据而生成的地图信息的一例,是表示出对象区域的位置、形状等信息的二维地图信息。在图4a所示的地图信息中,假设在通过lidar而未检测到的部分存在障碍物(例如,在图4a中用标号a、b表示的临时放置的瓦楞纸箱、货物等),并事先对该区域进行填充。
54.在步骤s13中,控制部2进行将与检测到的障碍物一定的距离的区域作为无人搬运车agv无法侵入的“不可侵入区域”的处理。具体而言,将距离图4a的涂黑部分的边缘一定的距离(例如,无人搬运车agv的对角线的长度)的部分作为不可侵入区域。图4b是对图4a所示的涂黑区域设定了不可侵入区域的例子。
55.这里,例如根据无人搬运车agv的外形尺寸等,决定agv不会与人、物体发生碰撞而能够移动的可侵入区域和将agv的移动设为不可的不可侵入区域。在根据图4a所示的图像得到图4b所示的图像时,也可以进行去除在由lidar获取的图像信息中产生的图像噪声的处理。
56.在步骤s15中,如图4c所示,控制部2提取在上述步骤s13中设置的不可侵入区域的轮廓部分作为无人搬运车agv的通行路线41、43。此时,也可以进行去除规定以下的大小的障碍物的处理。由图4c可知,提取的通行路线41、43成为环绕路线。
57.在步骤s17中,控制部2根据在上述步骤s15中提取出的通行路线(后述的轮廓部分)提取拐角(中继地点)。图3是示出拐角提取处理的过程的流程图。
58.即,在图3的步骤s31中,例如如图5所示,控制部2沿着不可侵入区域45的轮廓部分(边缘)47设置一定间隔的点云(在图5中用
×
记号表示)。这些点云也是拐角的候选。
59.在步骤s33中,控制部2根据上述点云所成的角度来判别锐角、钝角等。通常,锐角是指90
°
以下的角度,钝角是指大于90
°
且小于180
°
的角度,这里,如后所述,只要相对于一条直线,另一条直线以一定的值(例如45
°
)以上倾斜,就规定为锐角或钝角,并提取连结规定的连续的点云的直线所成的角度为一定值以上的点云。
60.具体而言,着眼于图5的点c,只要连结距点c一定的距离l以上的点a、e的直线51、53所成的角θ1为一定的值以上,就能够根据图5判断为点c处的角为锐角。
61.关于其他着眼点,重复进行同样的处理。例如,只要以点f为起点,连结两肋的点d、h的直线55、57所成的角θ2为一定的值以上,就能够根据图5判断为点f处的角为钝角。
62.即,在计算两条直线所成的角度θ时,(例如,图5的直线ac和直线ce),是以一条直线为起点进行计算的,因此角度θ取0~180
°
之间的值。在图5的情况下,θ1为45
°
,θ2为135
°
,θ3为5
°
。
63.因此,关于角θ3,由于直线所成的角不为一定的角度以上,因此判别为钝角和锐角以外。根据通过这样的处理而得到的角度信息而提取的拐角的一例在图4d中示出。
64.在步骤s35中,控制部2根据上述步骤s33中的角度的判别结果,将与所成的角为一定以上的锐角、钝角对应的点决定为拐角。由此,能够有效地设定拐角,从而减少此时的信息量。
65.当图3所示的拐角的提取处理结束时,在图2的步骤s19中,进行将如上述那样提取出的拐角中的位于近距离的点作为一个拐角进行汇集的处理。
66.图4e示出了将在上述步骤s17中提取出的各个拐角在步骤s19中汇集为一个的例子。参照图4d可知,图4e所示的各个拐角由与锐角对应的内拐角和与钝角对应的外拐角构成。
67.接着,在图2的步骤s21中,控制部2连接拐角(中继地点)之间,并根据其线段的长度来计算距离。拐角之间的连接是连接它们之间没有障碍物的拐角彼此。而且,将这些拐角和计算出的距离作为路径信息存储在存储器4中。作为拐角之间的连接方法,能够采用以下
两种方法。
68.作为第一方法,连接上述各环绕路线的相邻的拐角彼此,并存储由此形成的线段的距离。另外,关于不相邻的拐角,只要是位于一定距离内,也以包含其他环绕路线的方式连接,并存储形成的线段的距离。这样,例如,能够避免无人搬运车agv基本上沿一个环绕路线持续行驶而几乎不沿其他环绕路线行驶的状态。这样形成的路径的例子在图4f中示出。
69.第二方法是连接所有的拐角彼此,并存储由此形成的线段的距离的方法。图4g是连接所有的拐角彼此而形成的路径的例子。例如由路径生成装置的用户选择采用哪一种方法。
70.接着,对在路径生成装置中决定到目的地为止的路径的处理进行说明。图6是示出目的地被指定的情况下的无人搬运车agv(路径生成装置)中的路径决定过程的流程图。关于控制部2,在图6的步骤s41中,由用户针对路径生成装置1的指令部9设定目的地(移动目标位置)。另外,指令部9具有信息输入用的键、触摸画面等。
71.在步骤s43中,路径生成装置1根据存储在存储器4中的路径信息,从当前地至目的地的拐角(中继地点)与拐角之间的距离的组合中搜索最佳的路径。这里,“最佳路径”是指移动距离最短的路径、或者尽可能沿建筑物的墙边通过的最短的路径。这样搜索到的路径是无人搬运车agv的移动不会妨碍行人等的路径。
72.在步骤s45中,控制部2一边控制驱动部8以沿着在步骤s43中搜索、决定的路径移动,一边使无人搬运车agv移动。在使agv移动至目的地的情况下,根据拐角的坐标以及拐角之间的距离信息而自主决定最佳的路程并使其移动。驱动部8例如由具有多个车轮和驱动这些车轮的马达等的公知的驱动机构构成。
73.在移动时,路径生成装置1的自身位置估计部11例如通过里程计(odometry),根据车轮的旋转角度等求出其移动量,并根据其累积结果估计agv的位置。另外,自身位置的估计也可以使用slam(simultaneous localization and mapping:同时定位和映射)。
74.另外,在目的地不位于中继地点上的情况下,调查最邻近的中继地点。然后,使用该中继地点之间,搜索最佳的路径。在移动时,首先移动至最邻近的中继地点,沿着上述搜索到的路径,从最后的中继地点移动至目的地。
75.图7是通过上述第一方法连接拐角之间而形成,并根据图4f所示的路径信息而搜索到的无人搬运车agv的移动路径的一例。另外,图8是通过上述第二方法连接所有的拐角之间而形成,并根据图4g所示的路径信息而搜索到的无人搬运车agv的移动路径的一例。
76.图7的移动路径71是在沿着墙壁的大框上移动的路径,图8的移动路径81是横穿通路的正中间而移动的路径。因此,可以说图7的移动路径71是与图8的移动路径81相比,尽量不妨碍行人的移动的移动路径。
77.这样,根据第一实施方式的路径生成装置,能够根据生成的地图信息提取可侵入区域的轮廓,并根据设置于该轮廓的点云所成的角,迅速地设定移动体(agv)的中继地点,因此容易生成考虑了障碍物的从出发地到目的地的、安全且最短的路径。
78.即,能够生成考虑了有无障碍物而有效地设定了中继地点的、可靠性较高的路径。另外,通过生成在可侵入区域中连接没有障碍物的拐角彼此而得的路径信息,能够在不妨碍人的通行、物品的移动的情况下生成出发地与目的地之间的最短路径。
79.<第二实施方式>
80.对本发明的第二实施方式进行说明。另外,第二实施方式的路径生成装置的结构与图1所示的第一实施方式的路径生成装置相同,因此,这里省略其说明。
81.图9是按照时间序列示出在第二实施方式的路径生成装置中生成地图信息的过程的流程图。在图9的步骤s51中,控制部2与第一实施方式(图2的步骤s11)同样地使用lidar(light detection and ranging:光检测和测距)来生成地图信息。图10a是生成的地图信息的一例,黑色部分是障碍物。
82.在步骤s53中,控制部2检测图10a所示的地图信息的颜色的浓淡的边界面,例如生成图10b所示的点云地图。然后,如图10c所示那样,进行从图10b的点云地图仅保留一定的长度(例如,想要从地图去除的瓦楞纸箱、锥体路障等障碍物的长度)以上的线段的处理。图10b的点云地图的信息量较多,因此通过如图10c那样进行线段检测,能够迅速地进行之后的有无拐角的判断处理。
83.在步骤s55中,控制部2以在上述步骤s53中提取出的线段的端点为基准,调查周围的占用状态(有无障碍物)。图10d是示出线段的端点(空心的〇记号)的地图,图10e是从各端点向最大打开的方向延伸出规定的长度(例如,无人搬运车agv的对角线的长度)的直线而生成的地图。
84.例如,在端点打开90
°
左右的情况下,设周围的占用率为0.25,在打开180
°
的情况下,设周围的占用率为0.5,在打开270
°
左右的情况下,设周围的占用率为0.75。
85.占用率是指以线段的端点为基准向周围扩展的程度,这里,根据占用率来判别锐角、钝角、平面。例如,将占用率0.25判别为锐角、将占用率0.75判别为钝角、将占用率0.5判别为平面。
86.图10f是示出从除了判定为平面的端点以外的、判别为锐角、钝角的端点向最大打开的方向延伸了一定的距离(例如,无人搬运车agv的对角线的长度)而提取的拐角的地图。对提取的各拐角赋予相连的编号。
87.在步骤s59中,如图10g所示那样连接拐角之间,将这些拐角和计算出的距离作为路径信息存储在存储器4中。
88.另外,在第二实施方式中,关于目的地被指定,通过无人搬运车agv(路径生成装置)决定到目的地为止的路径的处理,与图6所示的第一实施方式相同,因此省略其说明。另外,图11示出了在第二实施方式中根据路径信息搜索出的到目的地为止的无人搬运车agv的移动路径的一例。
89.根据这样的第二实施方式的路径生成装置,能够根据从由lrf生成的地图信息削减了信息量后的地图信息提取拐角,从而能够迅速地进行拐角的设定处理。特别是,在构造简单的设施中,能够有效地生成出发地与目的地之间的路径。
90.本发明不限定于上述实施方式,能够进行各种变形。
91.<变形例1>
92.在上述第一和第二实施方式的路径生成装置中,在生成地图信息的情况下,使用单个lrf(lidar)来检测障碍物,但并不限定于此。
93.例如,也可以在路径生成装置的高度方向不同的位置分别设置lrf1、lrf2,并根据通过它们而得到的信息来生成地图。在该情况下,当任意的lrf检测到障碍物时,假设该检测点存在障碍物来生成二维地图。
94.具体而言,在通过lrf1检测到图12的(a)所示的障碍物,通过lrf2检测到图12的(b)所示的障碍物的情况下,合成这两个检测结果,从而生成图12的(c)所示的地图。由此,能够在二维地图中获取与障碍物相关的三维的信息。
95.<变形例2>
96.在上述第一实施方式的路径生成装置中,考虑agv的形状等来设置不可侵入区域,但并不限定于此。
97.例如也可以是,路径生成装置除了设置lrf之外还设置有照相机,使用由照相机拍摄的信息来设置不可侵入区域。具体而言,在通过照相机拍摄到了图13的(c)所示的“禁止进入的锥体路障”的情况下,也可以对图13的(a)所示的根据lrf设定的不可侵入区域附加照相机信息,从而设定图13的(b)所示那样的不可侵入区域。由此,能够在地图信息中添加更准确的障碍物信息。
98.另外,照相机可以是生成二维的图像数据的二维照相机,或者也可以是生成三维的距离图像数据的三维照相机。
99.<变形例3>
100.在上述第一和第二实施方式中,对已经生成的地图信息进行检测拐角的处理,但也可以是通过搭载了照相机的agv生成地图,并在地图的生成过程中通过补充来追加供照相机识别的特定的构造物(例如,门等)的坐标作为拐角。
101.标号说明
102.1:路径生成装置;2:控制部;3:运算部;4:存储部(存储器);5:lrf(laser range finder:激光测距仪);7:地图信息生成部;8:驱动部;9:指令部;11:自身位置估计部;13:路径生成部。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。