1.本公开涉及自身位置估计装置及移动体。
背景技术:
2.一直以来,已知有使用搭载于移动体的传感器及移动环境的地图等而进行自主移动的移动体(例如,参照专利文献1)。
3.专利文献1的移动体具备角速度计算部、陀螺仪和移动控制部。角速度计算部基于用于旋转驱动移动体的驱动轮的旋转马达的旋转量来计算移动体的角速度。陀螺仪直接获取移动体的角速度。当由角速度计算部计算出的角速度与从陀螺仪获得的角速度之间的差大于规定值时,移动控制部使用从陀螺仪获得的角速度来估计旋转角度。另一方面,当上述差小于上述规定值时,移动控制部则使用角速度计算部计算出的角速度来估计旋转角度。
4.现有技术文献
5.专利文献
6.专利文献1:特开2007-200049号公报
技术实现要素:
7.本公开的目的在于提供一种能够不受移动体周围环境的影响而恰当地估计移动体自身位置的自身位置估计装置及移动体。
8.本公开的自身位置估计装置估计移动体的自身位置,其具备:n种传感器,检测与所述移动体的移动状况相关的、内容互不相同的信息,其中,n为2以上的自然数;环境判定部,对所述移动体周围的环境进行判定;选择部,根据所述环境判定部的判定结果,选择由所述n种传感器中的1种以上且小于n种的传感器检测出的信息;以及估计部,根据所述选择部所选择的信息估计所述移动体自身位置。
9.本公开的移动体具备上述自身位置估计装置。
10.发明效果
11.借助本公开的自身位置估计装置及移动体,可以不受移动体周围环境的影响而恰当地估计移动体的自身位置。
附图说明
12.图1是本公开的实施方式的移动体的主视图。
13.图2是本公开的实施方式的移动体的左侧视图。
14.图3是本公开的实施方式的移动体的右侧视图。
15.图4是本公开的实施方式的移动体的后视图。
16.图5是表示本公开的实施方式的移动体控制系统的方框图。
17.图6是表示本公开的实施方式的移动体的扫描范围的左侧视图。
18.图7是表示本公开的实施方式的移动体的扫描范围的俯视图。
19.图8是表示本公开的实施方式的移动体的扫描范围的主视图。
20.图9是表示本公开的实施方式的移动体的动作的流程图。
21.图10是表示本公开的实施方式的自身位置估计用信息的选择处理的流程图。
22.图11是表示本公开的实施方式的障碍物检测用信息的选择处理的流程图。
23.附图标记说明
24.1移动体;2基体部;3主体部;10车体;21车轮;22保险杠;23保险杠传感器;24反射板;30收纳部;31前面部;31a前面倾斜区域;32左面部;33右面部;34后面部;34a后面倾斜区域;35上面部;50收发部;51计程仪;52gps;53扫描部;54摄像部;55辅助发光部;56存储部;57控制装置;58传感器;59自身位置估计装置;311左头灯;312右头灯;313左线状发光部;313a第一左分割线状发光部;313b第二左分割线发光部;313c第三左分割线状发光部;314右线状发光部;314a第一右分割线状发光部;314b第二右分割线发光部;314c第三右分割线状发光部;315覆盖部件;316前转向灯;317第一开口部;318檐状部;319第二开口部;321收纳门部;322麦克风;323左突出部;324第三开口部;331右突出部;332第四开口部;341号码牌;342刹车灯;343后转向灯;344紧急停止按钮;345外盖;346第五开口部;351扬声器;531第一扫描部;531a左下扫描部;531b右下扫描部;532第二扫描部;532a左前扫描部;532b右前扫描部;533第三扫描部;534第四扫描部;541前方摄像部;542左侧摄像部;543右侧摄像部;544后方摄像部;551左侧面发光部;552右侧面发光部;553后面发光部;571自主移动控制部;572远程移动控制部;573自身位置估计部;574障碍物检测部;575获取部;576环境判定部;577选择部;578估计部;a1左下方二维扫描范围;a2右下方二维扫描范围;a3前方二维扫描范围;a4前方三维扫描范围;a5上方后方扫描范围;g地面。
具体实施方式
25.[实施方式]
[0026]
下面参照附图对本公开的一实施方式加以说明。
[0027]
<移动体的结构>
[0028]
下面对移动体的结构加以说明。在本实施方式中,作为移动体的一个示例,将对在室外、室内、设施、私有土地等处搬运物品的搬运机器人进行说明。但移动体还可以是扫地机、用于各种传感检测的移动体、与人进行交流的交流机器人、以及在室外、室内、设施、私有土地等处运送人的汽车或火车、由人力推动而移动的手推车等。图1是移动体的主视图。图2是移动体的左侧视图。图3是移动体的右侧视图。图4是移动体的后视图。图5是表示移动体的控制系统的方框图。图6是表示移动体的扫描范围的左侧视图。图7是表示移动体的扫描范围的俯视图。图8是表示移动体的扫描范围的主视图。
[0029]
首先,对移动体1的构造加以说明。如图1~图4所示,以从后方观察移动体1的情况为基准,规定前后、上下、左右方向。移动体1具备基体部2和主体部3。基体部2及主体部3构成车体10。
[0030]
基体部2具备4个车轮21。车轮21在配置于基体部2内部的未图示的驱动马达的驱动下分别独立地旋转。在基体部2的前部及后部分别配置有保险杠22。前后的保险杠22内分别配置有保险杠传感器23。当物体接触到该保险杠传感器23时,保险杠传感器23输出表明发生了该接触的检测信号。
[0031]
后侧的保险杠22的上方配置有左右一对反射板24。基体部2中配置有未图示的电池。
[0032]
主体部3形成为长方形的箱状。主体部3的内部空间构成了用于收纳物品的收纳部30。主体部3配置于基体部2的上方。
[0033]
如图1所示,主体部3的前面部31从正面观察时呈长边较长的大致长方形形状。
[0034]
前面部31中配置有左头灯311和右头灯312(以下,有时称为“头灯311、312”)。优选地,使头灯311、312为可令人联想到眼睛的圆形或椭圆形,但不限于这些形状。
[0035]
前面部31中配置有左线状发光部313和右线状发光部314。左线状发光部313、右线状发光部314(以下,有时称为“线状发光部313、314”)分别具有呈线状发光的发光区域。优选地,线状发光部313、314分别配置在头灯311、312的大致正上方,以便令人联想到眉毛。
[0036]
左线状发光部313具有第一左分割线状发光部313a、第二左分割线状发光部313b和第三左分割线状发光部313c。右线状发光部314具有以前面部31的左右方向的中心线为界,分别相对于第一左分割线状发光部313a、第二左分割线状发光部313b和第三左分割线状发光部313c呈轴对称形状的第一右分割线状发光部314a、第二右分割线状发光部314b和第三右分割线状发光部314c。
[0037]
第一左分割线状发光部313a及第一右分割线状发光部314a分别具有从正面观察时呈大致v字形的发光区域。第二左分割线状发光部313b和第三右分割线状发光部314c分别在第一左分割线状发光部313a和第一右分割线状发光部314a的上方,具有向右斜上方呈直线状延伸的发光区域。第三左分割线状发光部313c和第二右分割线状发光部314b分别在第二左分割线状发光部313b和第三右分割线状发光部314c的右侧,具有向左斜上方呈直线状延伸的发光区域。
[0038]
通过基于后述的控制装置57的控制,点亮头灯311、312,并选择性地分别使构成左线状发光部313的第一左分割线状发光部313a~第三左分割线状发光部313c中的一个、和构成右线状发光部314的第一右分割线状发光部314a~第三右分割线状发光部314c中的一个发光,从而能够使移动体1周围的人得到好像移动体1在改变表情那样的认知。
[0039]
前面部31中配置有覆盖线状发光部313、314的覆盖部件315。覆盖部件315被着色为与前面部31相同的颜色,其具有在线状发光部313、314不发光时使线状发光部313、314无法从外部看到的功能。
[0040]
前面部31中配置有左右一对前转向灯316。左侧及右侧的前转向灯316分别设置在线状发光部313、314的上方。前面部31中比前转向灯316更靠上方的区域(以下称为“前面倾斜区域”)31a向后方倾斜。
[0041]
如图2所示,在主体部3的左面部32中配置有收纳门部321。当打开收纳门部321时,能够将物品放入或移出收纳部30。收纳门部321既可以是转动式的,也可以是滑动式的。在左面部32的收纳门部321的前方配置有麦克风322。
[0042]
在左面部32的上端的前后方向上的中央位置设置有左突出部323。左突出部323具有向左侧延伸的基部和从基部末端向斜下方延伸的末端部。
[0043]
如图3所示,在主体部3的右面部33设有与左突出部323形状相同的右突出部331。
[0044]
如图4所示,在主体部3的后面部34配置有号码牌341。在号码牌341的上方配置有左右一对刹车灯342。后面部34中配置有左右一对后转向灯343。后面部34中比后转向灯343
更靠上方的区域(以下称为“后面倾斜区域”)34a向前方倾斜。
[0045]
在后面倾斜区域34a的右侧配置有紧急停止按钮344。按下紧急停止按钮344时,移动体1紧急停止。
[0046]
如图2以及图3所示,在主体部3的上面部35中的靠后一侧,配置有扬声器351。
[0047]
另外,如图5所示,车体10中配置有收发部50、计程仪51、gps(global positioning system:全球定位系统)52、扫描部53、摄像部54、辅助发光部55、存储部56和控制装置57。
[0048]
计程仪51根据车轮21的旋转状态检测移动体1的移动量和姿势(朝向),并输出检测结果。
[0049]
如图3和图4所示,收发部50和gps52配置在主体部3内部的上侧。gps52作为对经由无线发送的与移动体1的位置有关的gps信息进行检测的无线位置信息检测部发挥功能。
[0050]
扫描部53对移动体1的周围进行扫描,并输出扫描结果。如图1~图4所示,扫描部53包括第一扫描部531、第二扫描部532、第三扫描部533和第四扫描部534。
[0051]
第一扫描部531扫描移动体1的移动路径。第一扫描部531包括左下扫描部531a和右下扫描部531b。左下扫描部531a配置于左突出部323的末端部中与左面部32相对的一面。右下扫描部531b配置于右突出部331末端部中与右面部33相对的一面。左下扫描部531a和右下扫描部531b例如由使用扫描光进行扫描的二维lidar(light detection and ranging:激光雷达)构成,并且输出扫描结果。左下扫描部531a对移动体1左侧的相对于铅直面倾斜的二维的扫描范围进行扫描。右下扫描部531b对移动体1右侧的相对于铅直面倾斜的二维的扫描范围进行扫描。具体而言,左下扫描部531a对如下的线状的二维的扫描范围(以下称为“左下方二维扫描范围”)a1进行扫描,该左下方二维扫描范围a1如图6所示,在从侧面观察时呈半圆中有局部(图6中的下端部分)缺失的形状,且如图7和图8所示,以越靠下方越偏离左面部32的方式相对于铅直面倾斜。右下扫描部531b对如下的线状的二维的扫描范围(以下称为“右下方二维扫描范围”)a2进行扫描,该右下方二维扫描范围与左下方二维扫描范围a1同样地,在从侧面观察时呈半圆中有局部缺失的形状,且如图7和图8所示,以越靠下方越偏离右面部33的方式相对于铅直面倾斜。图6和图8中的附图标记g表示地面。另外,如上所述,从侧面观察时的左下方二维扫描范围a1和右下方二维扫描范围a2的形状并非半圆形,但是实际上,左下扫描部531a和右下扫描部531b扫描的是半圆形的范围。
[0052]
第二扫描部532对移动体1的移动路径的上方进行扫描。第二扫描部532包括左前扫描部532a和右前扫描部532b。左前扫描部532a和右前扫描部532b(以下,有时称为“前扫描部532a、532b”)配置于基体部2的前表面的左右的两个端部。前扫描部532a、532b例如由二维lidar构成。前扫描部532a、532b对移动体1的前方和侧方的、与水平面平行的二维的扫描范围进行扫描,并输出扫描结果。如图6~图8所示,前扫描部532a、532b对移动体1的前方和侧方的、与水平面平行的二维的扫描范围(以下称为“前方二维扫描范围”)a3进行扫描。
[0053]
第三扫描部533对移动体1的前方进行扫描。第三扫描部533配置于前面倾斜区域31a中的靠主体部3的内部的一侧。在前面倾斜区域31a中的、与第三扫描部533相对的位置处,形成有使第三扫描部533露出到外部的第一开口部317。在前面倾斜区域31a中,设置有从第一开口部317的上方、左侧方、右侧方向前方突出的檐状部318。檐状部318防止第三扫描部533被雨雪淋湿。第三扫描部533例如由使用扫描光扫描的三维lidar构成。第三扫描部533对移动体1前方的三维扫描范围进行扫描,并输出扫描结果。具体而言,第三扫描部533
对如图6所示在从侧面观察时呈扇形,且如图7所示在俯视时呈半圆形的三维扫描范围(以下称为“前方三维扫描范围”)a4进行扫描。
[0054]
第四扫描部534对移动体1的后方进行扫描。第四扫描部534配置于后面倾斜区域34a。第四扫描部534例如由二维lidar构成,对移动体1上方和后方的、相对于水平面倾斜的二维的扫描范围进行扫描,并输出扫描结果。具体而言,第四扫描部534对如图6所示在从侧面观察时呈相对于水平面倾斜的线状,且如图7所示在俯视时呈局部欠缺的椭圆形的二维的扫描范围(以下称为“上方后方扫描范围”)a5进行扫描。第四扫描部534可以由扫描上方的扫描部和扫描后方的扫描部构成,也可以由一台扫描部构成。另外,如上所述,俯视时的上方后方扫描范围a5的形状并非圆形,但实际上,第四扫描部534扫描的是圆形的范围。在第四扫描部534的上表面上配置有用以防止第四扫描部534被雨雪淋湿的外盖345。
[0055]
这里,计程仪51、gps52、第一扫描部531、第二扫描部532、第三扫描部533和第四扫描部534构成了检测与移动体1的移动状况相关的、内容互不相同的信息的多种传感器58。由于第一扫描部531、第二扫描部532、第三扫描部533和第四扫描部534各自的扫描范围不同,因此在本实施方式中,将这些扫描部视为检测内容互不相同的信息的多种传感器58。
[0056]
摄像部54包括前方摄像部541、左侧摄像部542、右侧摄像部543和后方摄像部544。
[0057]
前方摄像部541配置于在前面倾斜区域31a中的靠主体部3的内部的一侧、且在第三扫描部533的下方的位置。在前面倾斜区域31a上形成有使前方摄像部541的镜头露出到外部的第二开口部319。
[0058]
左侧摄像部542配置在左突出部323的末端部中的比左下扫描部531a更靠上方的位置。在左突出部323上形成有使左侧摄像部542的镜头露出到外部的第三开口部324。
[0059]
右侧摄像部543配置在右突出部331的末端部中的比右下扫描部531b更靠上方的位置。在右突出部331的末端部,形成有使右侧摄像部543的镜头露出到外部的第四开口部332。
[0060]
后方摄像部544配置于在后面倾斜区域34a中的靠主体部3的内部的一侧、且在第四扫描部534的下方的位置。在后面倾斜区域34a上形成有使后方摄像部544的镜头露出到外部的第五开口部346。
[0061]
辅助发光部55包括左侧面发光部551、右侧面发光部552和后面发光部553。左侧面发光部551配置在主体部3的左面部32的上边缘部。右侧面发光部552配置在主体部3的右面部33的上边缘部。后面发光部553配置在主体部3的后面部34的上边缘部的中央部分。左侧面发光部551、右侧面发光部552和后面发光部553在水平方向上呈线状延伸。
[0062]
存储部56存储移动体1的移动所需的各种信息。作为存储部56存储的信息,例如可举出:地图信息、移动路径信息、使控制装置57发挥功能的程序、与线状发光部313、314、辅助发光部55的发光模式相关的信息、扬声器351的发声模式、以及与后述的自身位置估计部573和障碍物检测部574中的信息选择条件相关的信息。另外,移动路径信息包括:确定移动路径的多个地点的坐标、移动路径周围存在的障碍物信息、由环境判定部576判定的环境信息(例如,与移动路径周围存在的人造物体或自然物体的相关的信息、与格栅排水井盖相关的信息等)。优选地,基于移动体1的目的地和当前位置来生成移动路径信息。可以基于存储在存储部56中的地图信息来生成移动路径信息,也可以经由通信设备等获取保存在服务器上的地图信息并基于此来生成移动路径信息。
[0063]
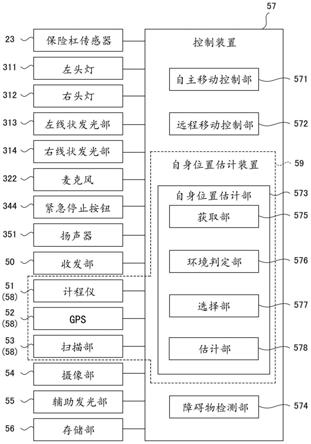
控制装置57通过由具有处理器的微型计算机执行存储在存储部56中的程序来实施各种处理。控制装置57与保险杠传感器23、左头灯311、右头灯312、左线状发光部313、右线状发光部314、麦克风322、紧急停止按钮344、扬声器351、计程仪51、收发部50、gps52、扫描部53、摄像部54、辅助发光部55、存储部56电连接。控制装置57包括自主移动控制部571、远程移动控制部572、自身位置估计部573和障碍物检测部574。
[0064]
自主移动控制部571根据由自身位置估计部573定期地估计出的自身位置以及存储在存储部56中的地图信息和移动路径信息等,使移动体1自主移动到目的地。在障碍物检测部574判定出移动体1的周围存在障碍物的情况下,自主移动控制部571使移动体1停止。作为障碍物,例如可举出台阶、电线杆、行人等,但不限于此。
[0065]
远程移动控制部572根据远程控制操作员对远程操作装置的操作来控制移动体1。远程移动控制部572经由收发部50,将由摄像部54拍摄到的影像和输入到麦克风322的移动体1外部的声音信息发送给远程操作装置。当收发部50接收到来自远程操作装置的远程操作信号时,远程移动控制部572根据远程操作信号控制移动体1的出发、移动、左右转向和停止。
[0066]
当在移动体1的移动过程中紧急停止按钮344被按下或由保险杠传感器23检测出接触时,自主移动控制部571和远程移动控制部572使移动体1停止。此外,在移动体1的移动过程中或电源接通的状态下,使头灯311、312点亮。
[0067]
自身位置估计部573和多种传感器58构成自身位置估计装置59。自身位置估计部573包括环境判定部576、获取部575、选择部577和估计部578。
[0068]
获取部575在移动体1的移动过程中或电源接通的状态下,定期获取由n(n是2以上的自然数)种传感器58检测出的信息。
[0069]
环境判定部576对移动体1周围的环境进行判定。作为环境判定部576判定的移动体1周围的环境,例如可举出:室内、室外、人或物的往来、第一区域、第二区域、移动路径上存在的移动体1不会掉落的大小的孔洞等,但不限于此。
[0070]
第一区域是基于由估计部578中的第二扫描部532~第四扫描部534检测出的信息的对自身位置的估计的精度小于阈值的区域。第二区域是基于由第二扫描部532~第四扫描部534检测出的信息的对自身位置的估计的精度在阈值以上的区域。举例来说,上述阈值可以是70%,但不限于此。作为第一区域,例如可举出移动体1周围的区域中自然物体所占的比例大于人造物体所占比例的区域,或者像停放在停车场的汽车、停放在单车停车场的自行车或摩托车那样,原本不存在于移动体1周围的物体在移动体1周围存在阈值时间以上的区域,但不限于此。作为第二区域,例如可举出移动体1周围的区域中人造物体所占的比例大于自然物体所占比例的区域,或者像行人或行驶中的自行车、摩托车、汽车那样,原本不存在于移动体1周围的物体不在移动体1周围存在阈值时间以上的区域,但不限于此。举例来说,上述阈值时间可以是5秒,但不限于此。作为人造物体,例如可举出房屋、店铺、大楼等建筑物、桥、电线杆、标识等。作为自然物体,例如可举出树、山、人、动物等。作为移动体1不会掉落的大小的孔洞,例如可举出格栅排水井盖。
[0071]
环境判定部576也可以基于地图信息和此前由估计部578估计出的自身位置来对环境进行判定。环境判定部576也可以基于移动体1过去的行驶记录、扫描部53的扫描结果和由摄像部54拍摄到的影像中的至少一项来对环境进行判定。如果在建筑物或道路附近设
置有发出用于告知人造物体或自然物体的存在的信号的装置,则环境判定部576可以基于该信号来对环境进行判定。
[0072]
环境判定部576可以采用以下方法来确定移动体1的存在位置是第一区域还是第二区域。例如,可以根据基于移动路径信息的人造物体或自然物体的存在状态或摄像部54中的摄像结果,计算移动体1周围的范围(从移动体1可见的范围)内人造物体所占的比例和自然物体所占的比例,再根据该计算的结果判定移动体1的存在位置是第一区域还是第二区域。此外,也可以使移动路径信息包括表示移动路径上的规定位置是第一区域还是第二区域的信息,再根据该信息和自身位置估计结果来判定移动体1的存在位置是第一区域还是第二区域。另外,还可以根据摄像部54的摄像结果,计算移动体1周围的行人、自行车、摩托车、汽车的存在时间,再根据该计算结果和移动路径信息中的与移动路径周围存在的人造物体相关的信息来判定移动体1的存在位置是第一区域还是第二区域。
[0073]
选择部577根据环境判定部576的判定结果,选择由获取部575获取的来自n种传感器58的信息中的由1种以上且小于n种的传感器58检测出的信息。例如,选择部577可以从由计程仪51、gps52、第二扫描部532、第三扫描部533和第四扫描部534检测出的信息,即5种信息中,选择1种以上且小于5种(4种以下)的信息,作为用于自身位置估计的信息。选择部577从由计程仪51、gps52、第一扫描部531、第二扫描部532、第三扫描部533和第四扫描部534检测出的信息中,即6种类信息中,选择1种以上且小于6种(5种以下)的信息,作为用于障碍物检测的信息。关于选择部577的处理的详情,请见后述。
[0074]
估计部578根据由选择部577选择的作为自身位置估计用信息的信息,来估计移动体1的自身位置。
[0075]
当选择了计程仪51的信息时,估计部578根据移动体1开始移动时的位置和姿势以及从计程仪51输出的检测结果来估计自身位置。
[0076]
当选择了gps52的信息时,估计部578根据移动路径信息和从gps52输出的gps信息来估计自身位置。
[0077]
当选择了第二扫描部532的信息时,估计部578根据从第二扫描部532输出的扫描结果,计算移动体1与存在于前方二维扫描范围a3中的物体(人造物体、自然物体)之间的距离以及物体相对于移动体1的存在方向。估计部578基于上述计算结果和移动路径信息来估计自身位置。
[0078]
当选择了第三扫描部533的信息时,估计部578根据从第三扫描部533输出的扫描结果,生成与前方三维扫描范围a4相对应的三维地图。估计部578基于所生成的三维地图、以及移动路径信息来估计自身位置。
[0079]
当选择了第四扫描部534的信息时,估计部578根据第四扫描部534输出的扫描结果,生成至少与上方后方扫描范围a5中比第四扫描部534更靠上方的范围相对应的三维地图。估计部578基于所生成的三维地图、以及移动路径信息来估计自身位置。
[0080]
障碍物检测部574基于由选择部577作为障碍物检测用信息选出的信息,检测存在于移动体1周围的障碍物。
[0081]
当选择了计程仪51的信息时,障碍物检测部574根据移动体1的开始移动时的位置和姿势、从计程仪51输出的检测结果、以及移动路径信息来检测障碍物。
[0082]
当选择了gps52的信息时,障碍物检测部574根据移动路径信息和从gps52输出的
gps信息来检测障碍物。
[0083]
当选择了第一扫描部531的信息时,障碍物检测部574根据从第一扫描部531输出的扫描结果,计算移动体1与存在于左下方二维扫描范围a1或右下方二维扫描范围a2中的物体之间的距离以及物体相对于移动体1的存在方向。障碍物检测部574基于上述计算结果和移动路径信息,检测存在于移动体1侧方附近位置的障碍物。
[0084]
当选择了第二扫描部532的信息时,障碍物检测部574与估计部578一样,计算移动体1与存在于前方二维扫描范围a3中的物体之间的距离以及物体相对于移动体1的存在方向。障碍物检测部574基于上述计算结果和移动路径信息来检测障碍物。
[0085]
当选择了第三扫描部533的信息时,障碍物检测部574与估计部578一样,生成与前方三维扫描范围a4相对应的三维地图。障碍物检测部574基于所生成的三维地图、以及移动路径信息来检测障碍物。
[0086]
当选择了第四扫描部534的信息时,障碍物检测部574通过与估计部578同样的处理来生成与上方后方扫描范围a5相对应的三维地图。此时,障碍物检测部574生成与第四扫描部534上方的范围和下方的范围中的至少一个范围相对应的三维地图。障碍物检测部574基于所生成的三维地图、以及移动路径信息来检测障碍物。
[0087]
<移动体的动作>
[0088]
接下来,对移动体1的动作加以说明。图9是表示移动体的动作的流程图。图10是表示自身位置估计用信息的选择处理的流程图。图11是表示障碍物检测用信息的选择处理的流程图。
[0089]
控制装置57根据自主移动控制部571或远程移动控制部572的控制来使移动体1移动。
[0090]
在自主移动控制部571或远程移动控制部572的控制中,如图9所示,控制装置57的获取部575获取由多种传感器58检测出的信息(步骤s1)。具体而言,获取部575获取由计程仪51、gps52、第一扫描部531、第二扫描部532、第三扫描部533和第四扫描部534检测出的信息。
[0091]
接着,环境判定部576对移动体1周围的环境进行判定(步骤s2)。在本实施方式中,环境判定部576要对移动体1是位于室内还是位于室外、移动体1是位于第一区域还是位于第二区域、以及是否存在格栅排水井盖进行判定。
[0092]
接下来,控制装置57的自身位置估计部573执行自身位置估计处理(步骤s3)。控制装置57的障碍物检测部574进行障碍物检测处理(步骤s4)。
[0093]
自主移动控制部571或远程移动控制部572根据在步骤s3的处理中获得的自身位置的估计结果和在步骤s4的处理中获得的障碍物的检测结果来控制移动体1的移动。另外,步骤s1的处理也可以在步骤s2的处理之后进行,步骤s3的处理也可以在步骤s4的处理之后进行。
[0094]
(自身位置估计处理:步骤s3)
[0095]
接下来,将详细说明步骤s3中的自身位置估计处理。自身位置估计部573的选择部577进行自身位置估计用信息的选择处理(步骤s31)。如图10所示,在步骤s31的处理中,选择部577从在步骤s1中获取的由计程仪51、gps52、第二扫描部532、第三扫描部533和第四扫描部534检测出的信息中选择规定的信息作为自身位置估计用信息。
[0096]
具体而言,选择部577基于步骤s2中的判定结果来判定移动体1是否位于室内(步骤s311)。选择部577在判定为移动体1位于室内时(步骤s311:是),进行第一选择处理(步骤s312),并结束自身位置估计用信息的选择处理。
[0097]
在本实施方式中,选择部577在步骤s312中选择由除gps52以外的传感器58检测出的信息作为自身位置估计用信息。换句话说,选择部577选择由第二扫描部532~第四扫描部534和计程仪51中的至少一者检测出的信息作为自身位置估计用信息。如果移动体1位于室内,gps52可能无法检测出gps信息。因此,估计部578可能无法基于gps52检测出的信息来估计移动体1的自身位置,或者有可能将与实际位置不符的位置估计为自身位置。与此相对地,移动体1位于室内这一情况对计程仪51、第二扫描部532~第四扫描部534的信息检测状态几乎没有不利影响。因此,估计部578能够基于由除gps52以外的传感器58检测出的信息来恰当地估计移动体1的自身位置。
[0098]
在判定为移动体1不是位于室内的情况下(步骤s311:否),选择部577根据步骤s2中的判定结果,判定移动体1是否位于第一区域(步骤s313)。选择部577在判定为移动体1位于第一区域的情况下(步骤s313:是),进行第二选择处理(步骤s314),并结束自身位置估计用信息的选择处理。
[0099]
在本实施方式中,选择部577在步骤s314中选择由除第二扫描部532~第四扫描部534以外的传感器58检测出的信息作为自身位置估计用信息。换句话说,选择部577选择由计程仪51和gps52中的至少一者检测出的信息作为自身位置估计用信息。
[0100]
例如,在第一区域为自然物体所占比例较大的区域的情况下,树木等自然物体有可能因风等原因摇动而导致形状不稳定。因此,有可能无法通过第二扫描部532~第四扫描部534恰当地检测出与自然物体之间的距离。此外,例如第一区域是原本不存在于移动体1的周围的物体在移动体1的周围存在阈值时间以上的区域(停放有汽车的停车场的区域)时,有可能由第二扫描部532~第四扫描部534检测出与该地点原本不存在的物体之间的距离。因此,在移动体1位于第一区域的情况下,估计部578可能无法基于由第二扫描部532~第四扫描部534检测出的信息来估计移动体1的自身位置,或者将与实际位置不符的位置估计为自身位置。
[0101]
与此相对地,移动体1的周围自然物体较多、或原本不存在于移动体1周围的物体在移动体1周围存在阈值时间以上这一情况,对计程仪51和gps52的信息检测状态几乎没有不利影响。因此,即使在移动体1位于第一区域的情况下,估计部578也能够基于由除第二扫描部532~第四扫描部534以外的传感器58检测出的信息来恰当地估计移动体1的自身位置。
[0102]
选择部577在判定为移动体1不是位于第一区域的情况下(步骤s313:否),判定为移动体1位于第二区域(步骤s315)。接着,选择部577执行第三选择处理(步骤s316),并结束自身位置估计用信息的选择处理。
[0103]
在本实施方式中,选择部577在步骤s316中选择由除gps52以外的传感器58检测出的信息作为自身位置估计用信息。换句话说,选择部577选择由第二扫描部532~第四扫描部534和计程仪51中的至少一者检测出的信息作为自身位置估计用信息。
[0104]
例如,在第二区域是人造物体所占比例较大的区域时,在位于例如高层建筑之间、隧道中、高架路下、地下停车场中时,gps52可能无法检测出gps信息。因此,估计部578可能
无法基于gps52检测出的信息来估计移动体1的自身位置,或者有可能将与实际位置不符的位置估计为的自身位置。
[0105]
与此相对地,移动体1周围人造物体较多这一情况对计程仪51、第二532~第四扫描部534的信息检测状态几乎没有不利影响。另外,例如,在第二区域是原本不存在于移动体1周围的物体不在移动体1周围存在阈值时间以上的区域(存在行人、行驶中的自行车、摩托车、汽车的区域)时,第二扫描部532~第四扫描部534多次检测出与原本不存在于该地点的物体之间的距离的可能性较低。因此,估计部578能够基于由gps52以外的传感器58检测出的信息来恰当地估计移动体1的自身位置。另外,由于人造物体的形状稳定,第二扫描部532~第四扫描部534能够恰当地检测出与人造物体之间的距离。因此,估计部578能够基于由第二扫描部532~第四扫描部534检测出的信息来更恰当地估计移动体1的自身位置。
[0106]
如图9所示,当步骤s31的自身位置估计用信息的选择处理结束时,估计部578根据步骤s31中选择的自身位置估计用信息来估计移动体1的自身位置(步骤s32)。当在步骤s32的处理中选择了多个自身位置估计用信息的情况下,估计部578可使用被选择的自身位置估计用信息中的每一个来分别估计自身位置,并将估计结果的平均位置或被估计出的次数最多的位置作为自身位置。另外,估计部578也可以根据预先设置的优先级或基于移动体1周围的环境设置的优先级,从多个自身位置估计用信息中选择一个自身位置估计用信息,并根据所选择的自身位置估计用信息来估计自身位置。另外,根据上述优先级,从多个自身位置估计用信息中选择一个自身位置估计用信息的处理也可由选择部577执行。
[0107]
(障碍物检测处理:步骤s4)
[0108]
接下来,对步骤s4的障碍物检测处理进行详细说明。障碍物检测部574根据选择部577的处理结果,进行障碍物检测用信息的选择处理(步骤s41)。首先,在步骤s41的处理中,如图11所示,选择部577根据步骤s2中的判定结果来判定移动体1的周围是否存在格栅排水井盖(步骤s411)。选择部577在判定为存在格栅排水井盖的情况下(步骤s411:是),进行第四选择处理(步骤s412),并结束障碍物检测用信息的选择处理。
[0109]
在本实施方式中,选择部577在步骤s412中选择由除第一扫描部531以外的传感器58检测出的信息作为障碍物检测用信息。换句话说,选择部577选择由第二扫描部532~第四扫描部534、计程仪51、gps52中的至少一者检测出的信息作为障碍物检测用信息。存在格栅排水井盖时,从第一扫描部531向移动路径发射的扫描光会进入格栅排水井盖,可能无法恰当地检测出与移动路径的路面之间的距离。在这种情况下,障碍物检测部574会错误地检测出设置有格栅排水井盖的位置处存在实际上并不存在的台阶,从而移动体1有可能在自主移动控制部571的控制下停止。与此相对地,格栅排水井盖的存在对计程仪51、gps52、第二扫描部532~第四扫描部534的信息检测状态几乎没有不利影响。因此,障碍物检测部574能够基于由除第一扫描部531以外的传感器58检测出的信息来恰当地检测障碍物。
[0110]
选择部577在判定为不存在格栅排水井盖的情况下(步骤s411:否),进行第五选择处理(步骤s413),并结束障碍物检测用信息的选择处理。
[0111]
在本实施方式中,选择部577在步骤s413中选择包括第一扫描部531在内的所有传感器58中的至少一个传感器58检测出的信息作为障碍物检测用信息。这是因为在不存在格栅排水井盖的情况下,第一扫描部531的信息检测状态几乎不会受到上述不利影响,所有传感器58的检测状态几乎相同。
[0112]
如图9所示,当步骤s41中的障碍物检测用信息的选择处理结束时,障碍物检测部574根据所选择的障碍物检测用信息来检测障碍物(步骤s42)。当在步骤s42的处理中选择了多个障碍物检测用信息时,障碍物检测部574可以使用被选择的障碍物检测用信息中的每一个来分别检测障碍物。在这种情况下,障碍物检测部574可以将使用各障碍物检测用信息检测出的与障碍物之间的距离的平均值估计为与障碍物之间的距离。另外,障碍物检测部574也可以根据预先设置的优先级或基于移动体1周围的环境设置的优先级,从多个障碍物检测用信息中选择一个障碍物检测用信息,并根据所选择的障碍物检测用信息来检测障碍物。
[0113]
在本实施方式中,基于有无格栅排水井盖进行了障碍物检测用信息的选择处理,但是,例如也可以根据是否在第一扫描部531~第四扫描部534中的至少一个扫描部出现了扫描范围内仅存在扫描部无法检测出物体的环境(以下,有时称为“不可检测环境”)的情况,来进行障碍物检测用信息的选择处理。作为不可检测环境,例如可举出路面、墙壁或天花板为几近黑色的环境、或荧光灯等照明器具的光太强的环境,但不限于此。障碍物检测用信息的选择处理中,可以选择如下信息作为障碍物检测用信息:由除扫描范围中仅存在不可检测环境的扫描部以外的传感器58检测出的信息、或者由信息检测精度不受不可检测环境影响的计程仪51或gps52检测出的信息、或者由摄像部54拍摄到的影像。另外,当在第一扫描部531~第四扫描部534中的至少一个扫描部的扫描范围内仅存在不可检测环境时,可以停止移动体1,也可以降低移动体1的速度。
[0114]
[实施方式的作用及效果]
[0115]
移动体1的自身位置估计装置59对移动体1周围的环境进行判定,并根据环境的判定结果,选择由自身位置估计用的5种传感器58(计程仪51、gps52、第二扫描部532~第四扫描部534)中的1种以上且少于5种的传感器58检测出的信息。自身位置估计装置59根据所选择的信息来估计移动体1的自身位置。因此,即便是有时在多种传感器58中包括因环境影响而无法恰当地检测出信息的传感器58的情况下,自身位置估计装置59仍可根据无法恰当地检测出信息的传感器58以外的传感器58的信息,恰当地估计移动体1的自身位置。
[0116]
[实施方式的变形例]
[0117]
当然,本公开不限于以上说明的实施方式中所示的内容,在不脱离主旨的范围内能够进行各种改变。
[0118]
例如,选择部577在判定为移动体1不是位于室内,即,是位于室外的情况下(步骤s311:否),可以不进行步骤s313~s316的处理,而是选择由包括gps52在内的所有传感器58中的至少一个传感器58检测出的信息作为自身位置估计用信息。
[0119]
选择部577在是以下情况中的至少一者的情况下,可以进一步根据其他条件,来筛选作为自身位置估计用信息的信息:判定为移动体1位于室内(步骤s311:是)的情况、判定为移动体1位于第一区域(步骤s313:是)的情况、以及判定为移动体1位于第二区域(步骤s315)的情况。例如,在移动体1位于室内或第二区域(人造物体所占比例较大的区域),且在移动体1的周围的人或观叶植物较多的情况下,若人或观叶植物移动或因生长、修剪等而观叶植物的形状发生变化,则第二扫描部532~第四扫描部534有可能无法恰当地检测出与人或观叶植物之间的距离。在这种情况下,选择部577可以在由计程仪51、第二扫描部532~第四扫描部534检测出的信息中,选择由计程仪51检测出的信息作为自身位置估计用信息。
[0120]
选择部577也可以根据与图9~图10所示的判定标准不同的判定标准,选择由5种传感器58中的1种以上且少于5种的传感器58检测出的信息。例如,当移动体1的周围有很多人时,如上所述,由于第二扫描部532~第四扫描部534可能无法恰当地检测出与人之间的距离,所以选择部577也可以选择由计程仪51和gps52中的至少一者检测出的信息作为自身位置估计用信息。
[0121]
在传感器58中的某个传感器不能检测出信息时,选择部577可以选择来自除不能检测出信息的传感器以外的传感器的信息,在这种情况下,还可以根据预先设置的优先级来选择传感器。例如,在第一选择处理中,当计程仪51和第二扫描部532~第四扫描部534中的第三扫描部533无法检测出信息时,可以根据预先设置的优先级,在由计程仪51、第二扫描部532、第四扫描部534检测出的信息中选择作为自身位置估计用信息的信息。另外,在第二选择处理中,如果尽管移动体1位于室外,但是gps52无法检测出信息,则选择部577可以选择由计程仪51检测出的信息作为自身位置估计用信息。
[0122]
传感器58也可以不包括上述自身位置估计用的5种传感器中的1种以上、3种以下的传感器。另外,传感器58不限于上述自身位置估计用的5种传感器,还可以采用该5种传感器以外的传感器,或者在该5种传感器的基础上,还包括例如用于以如下所示的方法检测自身位置的其他种类的传感器。就以下所示的自身位置检测方法而言,除“行人自主导航定位”以外,在这些自身位置检测方法中使用的传感器相当于本公开的无线位置信息检测部。
[0123]
·
wifi(注册商标)定位(来自接入点的电波的三点定位)
[0124]
·
rfid(radio frequency identifier:射频识别器)定位(使用rfid标签的定位)
[0125]
·
信标定位(通过蓝牙(注册商标)的定位)
[0126]
·
地磁定位(将磁力数据和磁模式数据库化,用磁传感器读取)
[0127]
·
声波定位(通过扬声器 麦克风的定位)
[0128]
·
uwb(ultra wide band:超宽带)定位(使用无线和传感器,通过入射角和到达时间差进行测定)
[0129]
·
行人自主导航定位(利用陀螺仪传感器、加速度传感器、磁传感器定位)
[0130]
在移动体1中,也可以不设置自主行驶功能和通过远程操作而行驶的功能中的一者。也可以是,无论是否在移动体1中设置自主行驶功能,都在远程操作装置中显示自身位置估计装置59估计出的自身位置。本公开的自身位置估计装置也可以设置在由人驾驶的汽车等移动体上,在该汽车的导航装置中显示估计出的自身位置。
[0131]
工业实用性
[0132]
本公开能够适宜地用于自身位置估计装置及移动体。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。