技术特征:
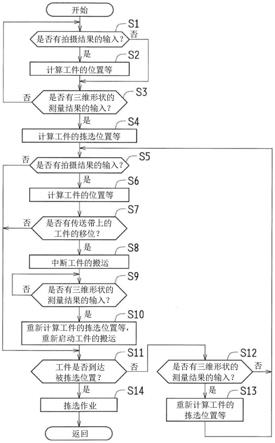
1.一种机器人控制系统,其具备:机器人,其对工件进行作业;三维形状测量装置,其测量工件的三维形状;以及控制装置,其根据所述三维形状测量装置的测量结果来控制所述机器人,所述机器人控制系统的特征在于,所述机器人控制系统具备拍摄装置,所述拍摄装置拍摄工件,所述拍摄装置的拍摄间隔比所述三维形状测量装置的测量间隔小,所述控制装置构成为,在从由所述三维形状测量装置进行测量起到由所述机器人进行作业为止的期间,基于由所述拍摄装置所作出的拍摄结果来计算工件的位置。2.一种机器人控制方法,其特征在于,所述机器人控制方法具备:通过拍摄装置来拍摄工件的步骤;通过三维形状测量装置来测量工件的三维形状的步骤;控制装置根据所述三维形状测量装置的测量结果来控制机器人,由此使所述机器人进行对工件的作业的步骤;以及在从由所述三维形状测量装置进行测量起到由所述机器人进行作业为止的期间,基于以比所述三维形状测量装置的测量间隔小的所述拍摄装置的拍摄间隔拍摄到的拍摄结果,通过所述控制装置来计算工件的位置的步骤。3.一种程序,其特征在于,所述程序用于使计算机执行:从拍摄装置输入对工件进行拍摄后的拍摄结果的流程;从三维形状测量装置输入对工件的三维形状进行测量后的测量结果的流程;根据所述三维形状测量装置的测量结果来控制机器人,由此使所述机器人进行对工件的作业的流程;以及在从由所述三维形状测量装置进行测量起到由所述机器人进行作业为止的期间,基于以比所述三维形状测量装置的测量间隔小的所述拍摄装置的拍摄间隔拍摄到的拍摄结果,计算工件的位置的流程。
技术总结
机器人控制系统具备:对工件进行作业的机器人、测量工件的三维形状的三维形状测量装置、以及根据三维形状测量装置的测量结果来控制机器人的控制装置,并且具备拍摄工件的拍摄装置。拍摄装置的拍摄间隔比三维形状测量装置的测量间隔小。控制装置构成为,在从由三维形状测量装置进行测量起到由机器人进行作业为止的期间,基于由拍摄装置所作出的拍摄结果来计算工件的位置。计算工件的位置。计算工件的位置。
技术研发人员:森山孝三 龟山晋 武贾张 卢卡斯
受保护的技术使用者:城南株式会社
技术研发日:2020.09.29
技术公布日:2022/5/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。