1.本公开涉及一种用于控制车辆的车辆控制装置。
背景技术:
2.以往,已知一种控制装置,其为了降低车辆停车时的冲击而进行制动力的降低控制。在专利文献1中,公开了一种控制装置,其为了在路面具有坡度的情况下也抑制车辆的下滑,并且降低停车冲击,而基于路面的坡度大小来确定制动力的増加率。
3.先行技术文献
4.专利文献
5.专利文献1:日本国特开2008-94246号公报
技术实现要素:
6.发明要解决的技术问题
7.在现有的控制装置中,基于车辆的当前位置处的路面的坡度大小来确定制动力的増加率。然而,在进行了制动器操作的时间点,车辆所行驶的位置处的坡度大小与预计车辆会停车的位置处的坡度大小不一定相同。在这样的情况下,产生了以下这样的问题:制动力的増加率没有被设定为适当的值。
8.因此,本公开鉴于这些点而完成,其目的在于提供一种能够降低车辆停车时的冲击的车辆控制装置。
9.用于解决技术问题的技术手段
10.本公开的车辆控制装置具有:预测部,其对车辆的停车位置进行预测;坡度确定部,其对所述预测部所预测的所述停车位置处的路面的坡度量进行确定;重量确定部,其对所述车辆的重量进行确定;以及制动控制部,其通过基于所述坡度确定部所确定的坡度量和所述车辆的重量而确定的变化速度,来使所述车辆的制动器的压力变化,由此对所述车辆进行制动。
11.所述坡度确定部所确定的所述坡度量越大,所述制动控制部例如就越使所述变化速度变大。
12.也可以是,所述重量确定部所确定的重量越大,所述制动控制部就越使所述变化速度变大。
13.也可以是,所述坡度确定部对检测到所述车辆要停车的时间点的从所述车辆的当前位置到所述停车位置为止的多个地点处的多个坡度量进行确定,所述制动控制部基于所述多个坡度量来确定所述变化速度。
14.发明效果
15.根据本公开,起到能够降低车辆停车时的冲击这样的效果。
附图说明
16.图1是用于对车辆的概要进行说明的图。
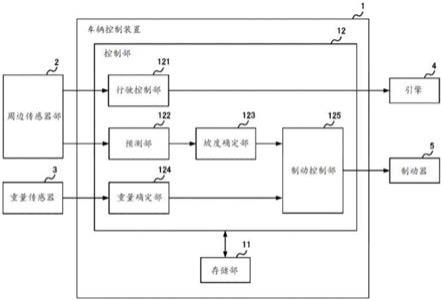
17.图2是表示车辆t的构成的图。
18.图3是用于对制动控制部125的动作进行说明的图。
19.图4是车辆控制装置1的动作流程图。
具体实施方式
20.[车辆t的概要]
[0021]
图1是用于对本实施方式的车辆t(本车辆)的概要进行说明的图。在图1中,示出了作为商用车的车辆t在前方车辆v的后方行驶的状态。车辆t具有acc(adaptive cruise control:自适应巡航控制)功能,一边追随前方车辆v的速度来控制本车辆的速度一边行驶。
[0022]
在图1的(a)所示的状态下,设前方车辆v开始了用于停车的减速。车辆t检测到前方车辆v要停车,为了使车辆t停车而开始减速。此时,车辆t对车辆t所要停车的位置进行预测。
[0023]
为了预测要停车的位置,车辆t首先通过基于前方车辆v的车速及减速度来算出到前方车辆v停车为止所需的距离,从而对前方车辆v停车的时间点的前方车辆v的后端的位置进行预测。车辆t将比预测到的前方车辆v的停车时的后端的位置提前了停车时的目标车间距离的位置,假定为车辆t停车时的车辆t的前端的位置,并基于该位置来将车辆t的预定部位(例如重心)的位置预测为停车位置。车辆t通过参照包含道路的坡度信息的地图信息来对预测到的停车位置处的道路的坡度量进行确定。另外,车辆t的停车位置在停车时不限于车辆t的重心位置,也可以是车辆t的中央等其他部位的位置。
[0024]
图1的(b)是表示车辆t所预测的前方车辆v及车辆t的停车位置的图。在图1的(b)所示的例子中,车辆t在有上坡的位置停车,车辆t对图1的(b)所示的车辆t的停车位置处的坡度量进行确定。
[0025]
车辆t基于确定的坡度量和车辆t的重量来对刚要停车前的制动器的压力(以下,称为“制动器压力”)的变化速度进行确定。具体而言,坡度量越大,车辆t就越使增大制动器压力的变化速度(即増加率)变大。此外,重量越大,车辆t就越使增大制动器压力的变化速度变大。
[0026]
由于车辆t像这样地动作,因而在车辆t所停车的位置存在坡度且重量较大的情况下,与车辆t所停车的位置平坦且重量较小的情况相比,制动器压力的变化速度会变大,制动器会动作得较强。结果,在车辆t所停车的位置存在坡度且重量较大的情况下,车辆t能够可靠地停车,并且在车辆t所停车的位置平坦且重量较小的情况下,能够抑制伴随制动器的动作的回摆。
[0027]
以下,针对车辆t的构成及动作,详细地进行说明。
[0028]
[车辆t的构成]
[0029]
图2是表示车辆t的构成的图。车辆t具有车辆控制装置1、周边传感器部2、重量传感器3、以及引擎4。
[0030]
车辆控制装置1是为了实现上述各种动作而对车辆t的各部分进行控制的装置,例
如为ecu(electronic control unit:电子控制单元)。车辆控制装置1具有存储部11和控制部12。控制部12具有行驶控制部121、预测部122、坡度确定部123、重量确定部124、以及制动控制部125。针对车辆控制装置1的详情,将在后面叙述。
[0031]
周边传感器部2例如具有雷达或照相机,并对车辆t的周边的状况进行检测。周边传感器部2例如对前方车辆v的速度、加速度及减速度进行检测。也可以是,周边传感器部2对于像信号灯、停止线、行人或障碍物等那样对给车辆t的行驶造成影响的其他状况进行检测。周边传感器部2将表示检测到的状况的数据输入到行驶控制部121及预测部122。
[0032]
重量传感器3对车辆t的重量进行检测。重量传感器3将表示检测到的重量的数据输入到重量确定部124。
[0033]
[车辆控制装置1的构成]
[0034]
存储部11具有rom(read only memory:只读存储器)及ram(random access memory:随机存储存取器)等存储介质。存储部11例如存储控制部12所执行的程序。也可以是,存储部11临时性地存储从周边传感器部2及重量传感器3输入的各种数据。此外,存储部11例如存储将多个坡度量和制动器压力的变化速度关联起来的查找表等关系数据。也可以是,存储部11存储多个车辆t的重量分别对应的制动器压力的变化速度。也可以是,存储部11存储坡度量与车辆t的重量的多个组合分别对应的制动器压力的变化速度。
[0035]
控制部12例如具有cpu(central processing unit:中央处理器),通过执行被存储于存储部11的程序,从而作为行驶控制部121、预测部122、坡度确定部123、重量确定部124及制动控制部125来发挥功能。
[0036]
行驶控制部121通过控制引擎4来控制车辆t的车速。行驶控制部121例如基于由周边传感器部2通知的前方车辆v的速度、加速度及减速度来确定车辆t的目标车速,并对引擎4进行控制,使得车辆t以目标车速行驶。也可以是,行驶控制部121进一步基于表示前方车辆v的速度、加速度及减速度以外的外部的状况的信息来确定目标车速。行驶控制部121例如在周边传感器部2检测到信号灯、停止线、行人或障碍物等的情况下,确定目标车速,以便能够在信号灯、停止线、行人或障碍物等的跟前位置停止。
[0037]
预测部122对车辆t的停车位置进行预测。预测部122例如基于由周边传感器部2通知的前方车辆v的速度、加速度及减速度来对前方车辆v要停车的位置进行预测,并确定比预测到的前方车辆v的停车位置提前了停止时的目标车间距离的位置,由此来预测车辆t的停车位置。也可以是,预测部122在周边传感器部2检测到信号灯、停止线、行人或障碍物等的情况下,将信号灯、停止线、行人或障碍物等的跟前的位置预测为停车位置。
[0038]
坡度确定部123对预测部122所预测的停车位置处的路面的坡度量进行确定。坡度确定部123例如通过参照地图信息来对预测停车位置的坡度量进行确定,该地图信息被存储于存储部11,包含表示道路坡度的信息。也可以是,坡度确定部123基于从周边传感器部2输入的表示周边状况的数据来对预测停车位置的坡度量进行确定。坡度确定部123将确定的坡度量通知给制动控制部125。
[0039]
重量确定部124基于从重量传感器3输入的数据来确定车辆t的重量。重量确定部124将确定的重量通知给制动控制部125。
[0040]
制动控制部125通过控制制动器5来对车辆t进行制动。制动控制部125在车辆t要停止时,通过如下方式来对车辆t进行制动:以基于坡度确定部123所确定的坡度量来确定
的变化速度,使制动器5的压力变化。也可以是,重量确定部124所确定的重量越大,则制动控制部125就越使制动器压力的变化速度变大。也可以是,制动控制部125通过如下方式来对车辆t进行制动:以基于坡度确定部123所确定的坡度量和重量确定部124所确定的车辆t的重量来确定的变化速度,使制动器5的压力变化。
[0041]
图3是用于对制动控制部125的动作进行说明的图。图3的横轴表示时间,纵轴表示制动器压力。图3中的虚线表示第1坡度量的情况下的制动器压力的变化,图3中的单点划线表示大于第1坡度量的第2坡度量的情况下的制动器压力的变化。
[0042]
制动控制部125例如通过参照关系数据,如果坡度确定部123所确定的坡度量越大,就越使制动器压力的变化速度变大,该关系数据表示被存储于如图3所示的存储部11的坡度量与制动器压力的变化速度的关系。例如坡度量的绝对值越大,制动控制部125就越使制动器压力的变化速度变大。也可以是,车辆t的重量越大,制动控制部125就越使制动器压力的变化速度变大。由于制动控制部125像这样地动作,因而在有坡度的道路中,车辆t能够在适当的位置停止,并抑制回摆。
[0043]
此外,也可以是,制动控制部125以坡度量的绝对值与车辆t的重量的组合所对应的变化速度来使制动器压力变化。例如将坡度量与重量相乘或相加得到的值越大,制动控制部125就越使制动器压力的变化速度变大。也可以是,制动控制部125基于从外部输入的指示,在将坡度量与重量相乘或相加时,对坡度量及重量分别进行不同的加权。由于制动控制部125像这样地动作,因而例如能够以与驾驶员的喜好相应的变化速度来使制动器压力变化。
[0044]
[车辆控制装置1的动作流程图]
[0045]
图4是车辆控制装置1的动作流程图。图4所示的动作流程图从预测部122预测到车辆t的停车位置的时间点起开始(步骤s1)。当预测部122预测到停车位置时,坡度确定部123对预测停车位置处的坡度量进行确定(步骤s2)。此外,重量确定部124对车辆t的重量进行确定(步骤s3)。步骤s2的处理和步骤s3的处理顺序是任意的。
[0046]
接着,制动控制部125基于在步骤s2中确定的坡度量、以及在步骤s3中确定的重量来对制动器压力的变化速度进行确定(步骤s4)。制动控制部125通过以确定的变化速度来使制动器压力变化并使制动器5动作,从而使车辆t停车。
[0047]
[变形例]
[0048]
在以上的说明中,例示了如下这样的情况:仅基于车辆t要停车的预定的位置处的道路的坡度量来对制动器压力的变化速度进行确定。与此不同,在车辆t中,也可以是,坡度确定部123对检测到车辆t或前方车辆v要停车的时间点的从车辆t的当前位置到预测停车位置为止的多个地点处的多个坡度量进行确定,制动控制部125基于坡度确定部123所确定的多个坡度量来确定变化速度。
[0049]
坡度确定部123例如对预测停车位置前后的预定范围中的多个坡度量进行确定,制动控制部125基于确定出的多个坡度量的平均值来决定变化速度。预定的范围例如为基于预测部122所预测的预测停车位置的预测精度来决定的范围,且为从预测为车辆t要停车的最接近当前位置的位置到最远离当前位置的位置为止的范围。也可以是,制动控制部125对于多个坡度量中的、靠近预测停车位置的位置的坡度量,比远离预测停车位置的位置的坡度量更大地进行加权,并基于算出的平均值来确定变化速度。由于坡度确定部123及制动
控制部125像这样地动作,因而能够降低预测部122的预测存在误差的情况下的影响。
[0050]
[车辆控制装置1的效果]
[0051]
如以上说明的那样,在车辆控制装置1中,预测部122对车辆t的停车位置进行预测,制动控制部125基于被预测到的停车位置处的坡度量和车辆t的重量,对使车辆t停车时的制动器压力的变化速度进行确定。由于车辆控制装置1像这样地动作,因而能够在坡度量较大的情况下或车辆t的重量较大的情况下,可靠地使车辆t停车,并且抑制坡度量较小且车辆t的重量较小的情况下的回摆。
[0052]
以上,虽然用实施方式对本公开进行了说明,但本公开的技术范围不被限定于上述实施方式所记载的范围,在其主旨的范围内,能够进行各种变形及变更。例如,装置的全部或一部分能够以任意单位功能性地或物理地进行分散、整合而构成。此外,通过多个实施方式的任意组合而产生的新的实施方式也被包含在本公开的实施方式中。通过组合而产生的新实施方式的效果兼具原实施方式的效果。
[0053]
本技术基于2019年9月24日申请的日本国专利申请(日本特愿2019-173072),并将其内容作为参照援引于此。
[0054]
工业可利用性
[0055]
根据本公开,在能够提供一种可降低车辆停车时的冲击的车辆控制装置这点上是有用的。
[0056]
附图标记说明
[0057]
1 车辆控制装置
[0058]
2 周边传感器部
[0059]
3 重量传感器
[0060]
4 引擎
[0061]
5 制动器
[0062]
11 存储部
[0063]
12 控制部
[0064]
121 行驶控制部
[0065]
122 预测部
[0066]
123 坡度确定部
[0067]
124 重量确定部
[0068]
125 制动控制部
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
