操纵把手、覆盖装置和储物格以及机动车
1.本发明涉及一种用于布置在机动车的内部空间中的能手动操纵的操纵装置上的操纵把手。此外,本发明涉及一种包括操纵把手的覆盖装置以及一种包括该覆盖装置的储物格。此外,本发明涉及一种机动车,该机动车具有操纵把手、覆盖装置和/或储物格。
2.用于装备机动车的内部空间的元件可以包括各种类型的把手和操作装置并且必须满足某些的设计要求,以确保在发生事故的情况下车辆乘员受伤的风险较低。风险存在于:在发生事故时,车辆乘员由于身体部分、尤其头部撞击在尖锐且硬的棱边上而受伤。这些要求借助于设计标准和模拟这种情况的标准化测试得以保证并且在例如ece-r-21规定中进行了定义。
3.这类与安全相关的标准及其实施极大地限制了尤其设计方面的创作自由。因此存在在遵守安全规定的同时能够自由定义结构的设计特征的需求。
4.由现有技术已知用于设计操作装置和把手的各种变型。
5.例如,专利文献de 1 297 500 a示出一种用于车辆的操纵把手,其具有由弹性材料制成的中空体。泡沫塑料垫被封闭在空腔中。
6.专利文献de 85 25 127 u1示出一种结构元件,该结构元件具有尺寸稳定的芯部,该芯部包裹在不同厚度的泡沫塑料中。泡沫塑料层越厚,相关区域中的结构元件就越软。
7.本发明所要解决的技术问题是提供一种操纵把手、一种覆盖装置和一种储物格,它们以简单且廉价的方式同样满足安全要求并且提供广泛的设计自由度。
8.根据本发明,该技术问题通过根据权利要求1的操纵把手和根据权利要求8的覆盖装置以及根据权利要求9的储物格解决。操纵把手的有利的实施方式在从属权利要求2至7中示出。此外提供根据权利要求10的机动车。
9.本发明的第一方面是一种用于布置在机动车的内部空间中的能手动操纵的操作装置上的操纵把手。根据本发明,所述操纵把手包括基础单元,该基础单元由具有第一硬度的第一材料构造并且具有至少在部分区段设计用于紧固在操纵装置上的连接侧。此外,操纵把手包括把手元件,该把手元件与基础单元在与所述连接侧相对置的一侧上机械连接并且至少在部分区段构成操纵把手的外侧。把手元件由具有第二硬度的第二材料构成,其中,第一硬度大于第二硬度,并且第二材料的肖氏a硬度小于50。在基础单元的在不同平面中相邻地布置的外表面之间设计有半径r
t
,用于对基础单元至少部分地倒圆,其中适用,r
t
》3.2mm。
10.操纵把手也可以称为手柄或抓手。操纵手柄用于手动操纵或操作能够与其机械连接的操纵装置。在本发明的意义上,这样的操纵装置例如是可枢转的翻板或能卷起和展开和展开的卷帘,该翻板或卷帘可以用于关闭和/或覆盖机动车的内部空间中的储物格和/或附件。为了进行对操纵装置的手动操作,操纵把手由人抓住并且由人施加力,由此可以移动操纵装置。
11.根据本发明的操纵把手包括基础单元和把手元件。
12.基础单元具有连接侧,该连接侧设置用于与操纵装置形成机械连接。基础单元和操纵装置之间的机械连接既可以间接地、即借助于诸如螺栓、铆钉和/或粘合剂之类的连接
件实现,也可以直接地、例如通过形状配合实现。连接侧通常对应于下侧。基础单元的上侧与基础单元的连接侧或下侧邻接。上侧是指基础单元的表面的不用于布置和/或紧固在操纵装置上并且通常背离操纵装置的部分。上侧至少在部分区段构成背离连接侧的侧面。上侧由基础单元的布置在不同平面中的相邻的外表面构成。
13.基础单元可以是实心体或空心体。
14.把手元件也可以被称为装饰元件。把手元件至少在部分区段构成操纵把手的外侧,即在按规定布置的情况下至少部分地面向车辆内部空间的侧面。因此,把手元件、尤其把手元件的外侧是可以被人触摸的那个元件。因此,构造把手元件或尤其其外侧的材料优选地提供平均感觉舒适的触觉感觉。
15.把手元件在背离基础单元的连接侧的一侧上至少在部分区段与基础单元机械连接,其中,该连接可以通过摩擦配合、形状配合和/或材料接合来实现。有利地,把手元件可以从基础单元移除,例如为了测试目的。
16.通常,基础单元至少部分地被把手元件覆盖。优选地,仅基础单元的上侧至少部分地被把手元件覆盖,而连接侧不被把手元件覆盖。
17.在此,把手元件的垂直于基础单元上侧的延伸量、即其材料厚度可以局部不同地设计。在一种实施方式中,材料厚度在基础单元的所有被覆盖的区域中基本相同。
18.基础单元和把手元件由具有不同硬度的不同材料构成。基础单元至少在具有根据本发明的半径的成形元件上由第一材料构成,并且把手元件由第二材料构成,其中,第一材料比第二材料硬。换言之,操纵把手包括较硬的部件、即基础单元和较软的部件、即把手元件。这些材料也可以是材料混合物或复合材料,其中,材料混合物的硬度由形成该混合物的各个单独的材料的单独硬度组成。
19.通常,至少在根据本发明的半径的区域中构成基础单元的第一材料可以至少部分地是金属、尤其铝或铝合金。备选地,第一材料可以是塑料。通常,构成把手元件的第二材料是塑料。尤其地,第二材料可以是泡沫塑料。
20.第二材料的肖氏a硬度小于50。尤其地,第二材料具有小于40、必要时小于30的肖氏a硬度。硬度数据在此是指根据din iso 7610-1中描述的方法所确定的肖氏a硬度。把手元件是可弹性变形的,也就是说,把手元件在施加力时屈服并且在负载解除时恢复其先前的形状。
21.基础单元的上侧由基础单元的布置在不同平面中的多个外表面构成。在至少两个相邻的外表面之间构造有倒圆部,该倒圆部的半径r
t
大于3.2mm。半径r
t
通常也称为头部撞击半径。换言之,基础单元的至少一个棱边和/或角部以至少3.2mm的半径被倒圆。尤其地,基础单元的在头部撞击测试期间可能与测试体产生接触的所有棱边和/或角部都以至少3.2mm的半径倒圆。通过大于3.2mm的半径r
t
降低在发生撞击时头部严重受伤的风险。
22.根据本发明的操纵把手的特别的优点在于:在结构上遵守尤其在头部撞击造成受伤风险方面的安全要求,同时存在操纵把手的外形方面的设计自由度。
23.在操纵把手的一种实施方式中,所述基础单元具有至少一个紧固元件,用于将所述操纵把手机械地固定在能手动操纵的操纵装置上,所述基础单元还具有与紧固元件机械连接的基体,其中,至少该基体设计为具有在不同平面中相邻地布置的外表面之间的具有半径r
t
的倒圆部,其中适用,r
t
》3.2mm。
24.构成基体的上侧的相邻外表面以大于3.2mm的半径倒圆。在此,基体的上侧至少是基础单元的上侧的由基体形成的区域。
25.紧固元件设置用于机械固定在能手动操纵的操纵装置上。该固定也可以通过摩擦配合、形状配合和/或材料接合来实现。在一种特别的实施方式中,所述紧固元件在其背离基体的一侧上具有至少一个固定元件,该固定元件能够与操纵装置中的互补的留空部形成嵌接。
26.在一种实施方式中,所述紧固元件可以与基体构成结构单元。换言之,基础单元可以一件式设计并且具有至少一个固定元件。
27.优选地,基体的上侧完全被把手元件覆盖,从而基体至少在按规定布置在操纵装置上的情况下不可见。在此意义上,基体也可以称为把手元件的支架元件。
28.该实施方式的优点在于,将操纵把手紧固在操纵装置的功能与将把手元件紧固在基体或基础单元上的功能分开。
29.在操纵把手的一种实施方式中,所述紧固元件构成操纵把手的外侧的至少一个区段。
30.换言之,在这种实施方式中,基础单元不完全被把手元件覆盖。尤其地,基体仅至少在部分区段、优选完全地被把手元件覆盖。
31.紧固元件构成操纵把手的外侧的可见区段。在该实施方式中,紧固元件因此也是装饰元件。尤其地,紧固元件可以由第三材料构造,该第三材料优选是具有有品质的外观的材料、例如铬。
32.操纵把手的外侧的由紧固元件构成的区段优选直接与该外侧的由把手元件构成的区段邻接。在此,这两个区段之间的过渡部基本上是平坦的,也就是说,在该过渡区域中基本上不产生裂缝、接缝或棱边,尤其不产生可见的和/或明显的裂缝、接缝或棱边。
33.该实施方式的优点在于操纵把手和操纵装置之间的视觉上吸引人的过渡。
34.在操纵把手的一种实施方式中,所述基体通过摩擦配合和/或形状配合连接、尤其卡扣连接固定在所述紧固元件上。
35.基体和紧固元件彼此机械连接。优选地实现摩擦配合和/或形状配合的连接,其中,基体的至少一个连接元件嵌接在紧固元件的互补的留空部中。尤其地,该连接设计为卡扣连接。
36.该实施方式的优点是用于连接基体和紧固元件的接合过程较简单。
37.备选地或附加地,至少一个连接元件也可以设计用于实现基体和紧固元件之间的焊接连接。
38.在另外的实施方式中,机械连接备选地或附加地通过起粘合作用的粘合剂实现。
39.在操纵把手的一种实施方式中,所述把手元件在其外侧具有至少一个棱边和/或角部,该棱边和/或角部具有棱边半径rk,其中,rk《3.2mm。
40.换言之,在该实施方式中,把手元件的至少一个棱边和/或角部设计为具有小于3.2mm的半径。由于根据本发明第二材料具有小于50的肖氏a硬度并且该材料在施加力的情况下相应地高度地弹性变形,因此可以实现小于3.2mm的棱边半径用于在其外侧设计把手元件。尤其地,把手元件的外侧可以全部或部分地设计为具有尖锐的棱边。把手元件的外部形状因此可以与基础单元的外部形状不同。
41.该实施方式的优点是可以实现操纵把手的尖棱的设计,同时满足与安全相关的要求。
42.在操纵把手的一种实施方式中,所述把手元件通过注塑过程构造在基础单元上、尤其在所述基体上。
43.换言之,在该实施方式中,基础单元和把手元件之间的机械连接至少分时段地在产生把手元件的同时实现。基础单元和把手元件因此构成所谓的两部件-组件。通过注塑产生的机械连接可以是摩擦配合式的、形状配合式的和/或材料接合式的。
44.尤其地,把手元件被注射到基体上,从而基体和把手元件构成两部件-组件。该两部件-组件通过与紧固元件的机械连接构成操纵把手。
45.该实施方式的优点是在把手元件的制造过程中实现了基础单元、尤其基础单元的基体之间的机械连接。由此节省了过程时间和过程成本。
46.在备选的实施方式中,把手元件通过粘合剂粘合连接到基础单元或基体。
47.在操纵把手的一个实施方式中,基本上构成基础单元的第一材料具有至少55的布氏硬度。
48.布氏硬度通常根据din en iso 6506-1来确定。
49.换言之,基础单元、尤其基体具有与把手元件相比高的抗变形性。因此,基础单元设置用于将力传递到与操纵把手连接的操纵装置、例如用于储物格的覆盖装置,以便移动该操纵装置从而打开和/或关闭储物格。
50.优点在于简单地实现了通过操纵把手将力从人传递到能手动操纵的操纵装置。
51.本发明的第二方面是一种覆盖装置、尤其用于覆盖机动车中、例如中控台中的储藏空间,该覆盖装置包括操纵装置、尤其能卷起和展开的覆盖元件,所述覆盖装置具有至少一个根据本发明的操纵把手,该操纵把手布置在覆盖装置上。
52.覆盖装置尤其是用于覆盖机动车中的储藏空间的装置。备选地,覆盖装置可以用于覆盖机动车的内部空间中的附件或其它装置。
53.覆盖装置尤其包括能卷起和展开的覆盖元件,该覆盖元件也可以称为卷帘,在该覆盖元件上布置有至少一个根据本发明的操纵把手。操纵把手用于操纵覆盖装置,也就是说,移动覆盖装置以便打开和/或关闭由覆盖装置盖住的或者能够由覆盖装置盖住的储藏空间。
54.在此在一种实施方式中,基础单元可以整体或部分地与覆盖元件构成结构单元。
55.优点在于提供了一种尤其用在机动车中的覆盖装置,该覆盖装置的操纵把手满足需要的安全要求并且其外形具有高度的设计自由度。
56.本发明的第三方面是一种用于布置在机动车的中控台中或中控台上的储物格、尤其卷帘式格子,所述储物格包括储藏空间和至少一个根据本发明的用于覆盖所述储藏空间的覆盖装置。
57.本发明的另外的方面是一种机动车、尤其轿车,该机动车包括至少一个根据本发明的操纵把手、至少一个根据本发明的覆盖装置和/或至少一个根据本发明的储物格。
58.在此,尤其是卷帘式格子的储物格可以以不同的定向布置在车辆的内部空间中。在一种实施方式中,储物格例如是中控台卷帘式格子,其基本上布置在车辆的两个相邻座椅之间、尤其在驾驶员座椅和副驾驶座椅之间。在这种情况下,覆盖装置相对于其主延伸平
面基本上水平或相对于车辆的放置平面平行地布置或定向。
59.备选地,卷帘式格子可以布置在机动车的仪表板的附件区域中,从而覆盖装置相对于其主延伸平面基本上垂直于车辆的放置平面布置或定向。
60.备选地或附加地,根据本发明的操纵把手可以布置在机动车的各种内部空间-装备元件上并且设置和设计用于操纵这些内部空间-装备元件。因此也不排除布置在乘员车厢后部区域中的座椅之间、即后排座椅之间和/或布置在车门的内装饰件中或内装饰件上的可能性。
61.在操纵把手的一种实施方式中,至少外侧的那些相对于操纵把手布置或待布置在其中的机动车内部空间中的相邻物体具有小于82.5mm的距离的棱边和/或角部以大于3.2mm的半径被倒圆。换言之,至少在头部撞击测试时可能与模拟头部的测试体接触的那些棱边和/或角部被相应地倒圆。
62.以下根据在附图中所示的实施例详细阐述本发明。
63.在附图中:
64.图1:根据本发明的操纵把手的实施方式的三维视图;
65.图2:根据图1的根据本发明的操纵把手的实施方式的三维分解图;以及
66.图3:根据本发明的储物格的实施方式。
67.图1示出了根据本发明的操纵把手10的实施方式的三维视图,该操纵把手用于布置在操纵装置上,例如用于打开和/或关闭机动车的内部空间中的格子、储藏处和/或附件。在所示视图中可以看到,在把手元件20的根据图示的下侧上布置有紧固元件40。为了视觉上吸引人的设计,紧固元件20也是装饰元件,该装饰元件例如设计为至少部分地镀铬。在紧固元件40的下侧可以看到固定元件49,该下侧是操纵把手10的连接侧41。在所示示例中,紧固元件40和固定元件49构成结构单元。固定元件49用于将操纵把手10定位在操纵装置上并且将该操纵把手与例如储物格的操纵装置机械连接。为此,操纵装置具有用于容纳固定元件49的适配的留空部。
68.根据本发明,把手元件20优选地由较软的第一材料、尤其具有小于50的肖氏a硬度的材料构造。在一种实施方式中,把手元件20通过注塑过程构造在基础单元的上侧、尤其基础单元的基体上,该基础单元由较硬的第二材料构成。基体在图1中不可见。
69.在所示示例中,把手元件20的上侧的相邻的外表面朝向彼此倒圆。根据本发明这不是强制需要的。因为把手元件20由相应较软的材料制成,因此在发生事故的情况下把手元件20不造成尤其车辆乘员的头部的受伤风险。只有由较硬的材料制成的基础单元必须满足相应的要求,从而把手元件20的外观设计、尤其把手元件的外部形状可以基本上自由选择。
70.在图1中可以看到,操纵把手10设计为使得紧固元件40部分地构成操纵把手10的外侧,即,该紧固元件是可见的。紧固元件40的外侧和把手元件20之间的过渡部45设计为基本上是平坦的,换言之是无缝的。
71.图2示出根据图1的根据本发明的操纵把手10的实施方式的三维分解图。
72.在该图示中可以看到,基体30通过连接元件34和互补的留空部42以及定位元件44布置在紧固元件40的上侧上。在所示实施方式和图1中可以看到,在所示的所有元件按规定组装之后,操纵把手10的基体30对用户是不可见的。基体30和紧固元件40共同构成操纵把
手10的基础单元50。
73.基体30用于操纵配备有操纵把手10的操纵装置并且因此用于打开和/或关闭配备有相应的覆盖装置的储物格。换言之,打开和/或关闭所需的力通过基体30传递。为此,基体30由比把手元件20的材料具有更高硬度和强度的材料制成,这主要实现了对用户有吸引力的设计的功能。
74.基体的上侧32同时也是基础单元52的上侧的一部分并且由多个彼此相邻的面构成。为了在车辆乘员的头部撞击操纵把手10的情况下使受伤风险最小化,上侧32、52的相邻面之间的过渡部倒圆。在此,倒圆部的半径r
t
为至少3.2mm。不是基体30或基础单元50的所有面过渡部或棱边和/或角部都必须具有大于3.2mm的半径。根据操纵把手10在车辆中的布置相对于车辆内部空间的相邻元件间隔小于82.5毫米的棱边和/或角部不必满足这种要求,因为这些棱边和/或角部不蕴藏相应的头部撞击潜在风险。换言之,仅上侧32、52的棱边和/或角部必须配设有至少3.2mm的半径r
t
,其以相对于相邻主体的82.5mm的净距离安装。在图2中,这例如是指向根据图示的前方和上方的棱边。
75.与此相反,把手元件20的上侧的棱边和/或角部可以设计为具有小于3.2mm的半径rk,该棱边和/或角部基本上表示操纵把手10的外侧。把手元件20的棱边因此可以设计为尖锐的棱边。由于把手元件20的材料,这些尖锐的棱边不造成任何受伤风险。
76.类似于图1,连接侧41在此也设计为紧固元件40的下侧,在该下侧上布置有相应的固定元件49。
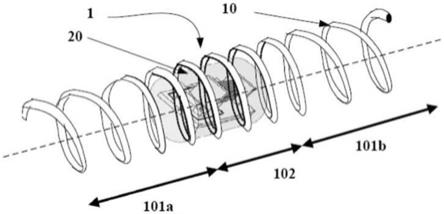
77.图3示出了根据本发明的储物格100的实施方式。可以看到包括操纵装置90和操纵把手10的覆盖装置,操纵装置在此是设计为卷帘的覆盖元件,操纵装置和操纵把手彼此机械连接。覆盖元件盖住储藏空间。在图3中,储物格示出为关闭的。
78.附图标记列表
79.10
ꢀꢀ
操纵把手
80.20
ꢀꢀ
把手元件
81.30
ꢀꢀ
基体
82.32
ꢀꢀ
基体的上侧
83.34
ꢀꢀ
连接元件
84.40
ꢀꢀ
紧固元件
85.41
ꢀꢀ
连接侧
86.42
ꢀꢀ
留空部
87.44
ꢀꢀ
定位元件
88.45
ꢀꢀ
过渡部
89.49
ꢀꢀ
固定元件
90.50
ꢀꢀ
基础单元
91.52
ꢀꢀ
基础元件的上侧
92.90
ꢀꢀ
操纵装置
93.100 储物格
94.rkꢀꢀ
把手元件的半径
95.r
t
ꢀꢀ
基体的半径
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。