1.本发明涉及对准装置。
背景技术:
2.已知有如下的对准装置,其设置于将成膜材料经由掩模的掩模开口部堆积在基板上来在基板上形成薄膜的成膜装置,用于进行掩模与基板的位置的调整。
3.在专利文献1中记载有如下的内容:具备低倍率相机和高倍率相机,利用低倍率相机拍摄掩模的粗略标记来取得粗略标记的位置信息,基于该位置信息以使掩模的精细标记位于高倍率相机的拍摄范围的方式移动高倍率相机,利用低倍率相机同时拍摄基板的粗略标记和掩模的粗略标记,使基板与掩模相对移动来进行粗略定位,利用高倍率相机同时拍摄基板的精细标记和掩模的精细标记,使基板与掩模相对移动来进行精细定位。
4.在先技术文献
5.专利文献
6.专利文献1:日本特开2015-67845号公报
技术实现要素:
7.本发明要解决的问题
8.在专利文献1所记载的对准装置中,在进行粗略定位和精细定位之后,使掩模与基板紧贴,因此从开始对准到掩模与基板紧贴为止花费时间。
9.因此,本发明的目的在于,提供能够缩短从开始对准到掩模与基板紧贴为止花费的时间的对准装置。
10.用于解决课题的方案
11.本发明的对准装置具备:拍摄部,其对形成于基板的基板标记和形成于掩模的掩模标记同时进行拍摄;以及控制部,其根据所述拍摄部拍摄到的图像来算出所述基板标记与所述掩模标记的距离,所述控制部在所述基板与所述掩模的距离比所述拍摄部的景深前端距离长的情况下,一边使所述基板与所述掩模以规定的速度接近,一边进行基于所述基板标记与所述掩模标记的距离使所述基板和所述掩模中的至少一方移动来使所述基板与所述掩模的位置靠近的第一对准处理,在所述基板与所述掩模的距离为所述拍摄部的景深前端距离以下的情况下,一边使所述基板与所述掩模以比所述规定的速度慢的速度接近,一边进行基于所述基板标记与所述掩模标记的距离使所述基板和所述掩模中的至少一方移动来使所述基板与所述掩模的位置一致的第二对准处理。
12.通过该结构,一边使基板与掩模接近一边进行基板标记与掩模标记的距离的算出、基板与掩模的位置调整。因此,能够缩短从开始对准到掩模与基板紧贴为止花费的时间。
13.另外,在本发明的对准装置中,所述控制部在所述基板与所述掩模的距离比所述拍摄部的景深前端距离长的情况下,反复执行在使所述基板与所述掩模接近了规定的距离
之后进行所述第一对准处理的操作,在所述基板与所述掩模的距离为所述拍摄部的景深前端距离以下的情况下,反复执行在使所述基板与所述掩模接近了比所述规定的距离短的距离之后进行所述第二对准处理的操作。
14.通过该结构,利用步进动作使掩模与基板接近,在基板与掩模的距离比景深前端距离长的情况下,将步进移动距离及步进移动速度都设得大,在基板与掩模的距离为景深前端距离以下的情况下,对步进移动距离及步进移动速度都进行抑制。因此,能够缩短从开始对准到掩模与基板紧贴为止花费的时间。
15.本发明的对准装置具备:拍摄部,其对形成于基板的基板标记和形成于掩模的掩模标记同时进行拍摄;以及控制部,其根据所述拍摄部拍摄到的图像来算出所述基板标记与所述掩模标记的距离,所述控制部进行如下的对准处理:使所述基板与所述掩模接近以使所述基板与所述掩模的距离成为所述拍摄部的景深前端距离,一边使所述基板与所述掩模以规定的速度接近,一边基于所述基板标记与所述掩模标记的距离使所述基板和所述掩模中的至少一方移动来使所述基板与所述掩模的位置一致。
16.通过该结构,一边从拍摄部的景深前端距离起使基板与掩模接近一边进行基板标记与掩模标记的距离的算出、基板与掩模的位置调整。因此,能够缩短从开始对准到掩模与基板紧贴为止花费的时间。
17.另外,在本发明的对准装置中,所述控制部利用与所述基板和所述掩模的距离对应的修正值来对所述基板和所述掩模的定位进行修正。
18.通过该结构,利用与掩模和基板的距离对应的修正值来对掩模与基板的定位进行修正。因此,能够精度良好地使掩模与基板的位置一致。
19.另外,本发明的对准方法是具备拍摄部和控制部的对准装置执行的对准方法,其中,所述拍摄部对形成于基板的基板标记和形成于掩模的掩模标记同时进行拍摄,所述控制部根据所述拍摄部拍摄到的图像来算出所述基板标记与所述掩模标记的距离,所述对准方法包括如下步骤:在所述基板与所述掩模的距离比所述拍摄部的景深前端距离长的情况下,一边使所述基板与所述掩模以规定的速度接近,一边进行基于所述基板标记与所述掩模标记的距离使所述基板和所述掩模中的至少一方移动来使所述基板与所述掩模的位置靠近的第一对准处理;以及在所述基板与所述掩模的距离为所述拍摄部的景深前端距离以下的情况下,一边使所述基板与所述掩模以比所述规定的速度慢的速度接近,一边进行基于所述基板标记与所述掩模标记的距离使所述基板和所述掩模中的至少一方移动来使所述基板与所述掩模的位置一致的第二对准处理。
20.通过该结构,一边使基板与掩模接近一边进行基板标记与掩模标记的距离的算出、基板与掩模的位置调整。因此,能够缩短从开始对准到掩模与基板紧贴为止花费的时间。
21.发明效果
22.本发明能够提供可缩短从开始对准到掩模与基板紧贴为止花费的时间的对准装置。
附图说明
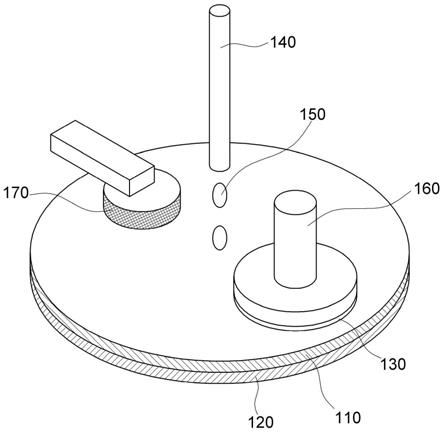
23.图1是本发明的一实施方式的对准装置的简要立体图。
24.图2是表示本发明的一实施方式的对准装置的标记的状态的示例的图,图2的(a)是表示基板与掩模的位置不一致的状态的图,图2的(b)是表示基板与掩模的位置一致的状态的图。
25.图3是表示本发明的一实施方式的对准装置的基板与掩模的距离随时间的变化及标记间距离的变化的图。
26.图4是说明本发明的一实施方式的对准装置的对准处理的步骤的流程图。
27.图5是表示基于本发明的一实施方式的对准装置的对准处理实现的基板与掩模的位置的变化及标记位置的变化的示例的图,图5的(a)是表示基板离得比景深前端距离远的状态的图,图5的(b)是表示基板位于景深前端距离的状态的图,图5的(c)是表示基板离得比景深前端距离近的状态的图。
28.图6是说明本发明的一实施方式的第一变形例的对准装置的对准处理的步骤的流程图。
29.图7是说明本发明的一实施方式的第二变形例的对准装置的对准处理的步骤的流程图。
具体实施方式
30.以下,参照附图来详细说明本发明的实施方式的对准装置。
31.在图1中,具备本发明的一实施方式的对准装置的成膜装置1构成为包括掩模台2、作为拍摄部的相机3以及控制部4。
32.掩模台2固定用于在基板12上形成规定图案的薄膜的掩模11。掩模台2将掩模11保持为与水平面平行。
33.掩模11具有与要形成在基板12上的规定图案对应的开口111。在掩模11上形成有用于测定掩模11的位置的掩模标记112。掩模标记112由形成于掩模11的孔构成。掩模标记112不局限于孔,例如也可以通过凹部、凸部或者二维的显示来形成。开口111设定为与要形成在基板12上的规定图案对应的形状、数量,并不限定于本实施方式的形状、数量。
34.基板12由未图示的基板支架保持为与掩模11平行。在基板12上形成有用于测定基板12的位置的基板标记121。在本实施方式中,作为基板12,使用的是玻璃基板,由于在基板标记121附近不形成薄膜,因此能够在基板标记121附近透过基板12来确认例如掩模标记112。基板标记121例如通过铬等不透明的金属的薄膜来形成。
35.掩模标记112及基板标记121在掩模11或基板12上至少形成两处,它们的形成位置不限定于本实施方式的位置(配置)。就掩模标记112及基板标记121而言,若要在掩模11与基板12重叠而紧贴时使掩模11的开口111成为基板12上的规定位置,则例如以掩模标记112与基板标记121的中心一致的方式形成。掩模标记112及基板标记121只要能够分别检测出掩模11或基板12的位置且能够进行调整以在掩模11与基板12重叠而紧贴时使掩模11的开口111成为基板12上的规定位置即可,也可以不以在掩模11的开口111成为基板12上的规定位置时中心一致的方式形成。
36.基板支架在控制部4的控制下能够调整基板12的位置、倾斜角度等。基板支架在控制部4的控制下能够使基板12沿着铅垂方向升降。
37.相机3测定基板12及掩模11各自的位置。相机3设置成从铅垂方向的上方拍摄基板
12及掩模11。相机3以同时拍摄掩模标记112和基板标记121的方式设置。需要说明的是,也可以设置分别拍摄掩模标记112和基板标记121的相机3来测定基板12及掩模11各自的位置。
38.相机3以对焦到掩模11的相机3侧的面上的方式设定,景深的前端(相机3侧的端部)成为图中h所示的位置。从掩模11的相机3侧的面(表面)起用h表示的、从掩模11的表面到相机3的景深的前端为止的距离即景深前端距离预先被算出或测定出并存储在控制部4的存储部中。
39.控制部4进行相机3和基板支架的控制。控制部4根据由相机3拍摄到的掩模标记112和基板标记121的图像来算出掩模标记112与基板标记121的距离,基于该距离利用基板支架来移动基板12的位置,以使掩模11与基板12在水平方向上重叠且掩模11的开口111成为基板12上的规定位置的方式调整基板12的位置。需要说明的是,也可以不调整基板12的位置而调整掩模11的位置,还可以调整掩模11和基板12这两方的位置。
40.控制部4例如从图2的(a)所示的掩模标记112和基板标记121的状态起,一边利用基板支架使基板12在铅垂方向上靠近掩模11,一边基于掩模标记112和基板标记121的图像来算出基板12的水平方向的移动量并利用基板支架来移动基板12的位置,如图2的(b)所示,使掩模11与基板12的水平方向上的位置一致并使掩模11与基板12在铅垂方向上紧贴。
41.控制部4根据掩模11与基板12的铅垂方向上的距离来修正基板12的移动量。控制部4例如将掩模11与基板12的铅垂方向上的距离分割为多个区域,按区域来存储修正值。控制部4也可以通过将掩模11与基板12的铅垂方向上的距离等作为参数的数学式来算出修正值。
42.控制部4在掩模11与基板12的铅垂方向上的距离比景深前端距离长的情况下,进行粗略对准。控制部4在粗略对准中,将基板支架使基板12在铅垂方向上向掩模11进行接近移动的速度设为规定的高速度。
43.在掩模11与基板12的铅垂方向上的距离比景深前端距离长的情况下,由于基板12位于景深外,因此处于基板标记121没有对焦的状态,但只要能够通过图像处理来算出掩模标记112与基板标记121的距离,则也可以开始粗略对准。
44.控制部4在掩模11与基板12的铅垂方向上的距离为景深前端距离以下的情况下,进行精密对准。控制部4在精密对准中,将基板支架使基板12在铅垂方向上向掩模11进行接近移动的速度设为比粗略对准时的速度慢的速度。
45.在掩模11与基板12的铅垂方向上的距离为景深前端距离以下的情况下,由于基板12位于景深内,因此处于掩模标记112与基板标记121这两方都对焦的状态,能够精密地进行对准。
46.图3是表示本实施方式的对准处理的动作例的图。在掩模11与基板12的铅垂方向上的距离比景深前端距离长的期间,以规定的速度使基板12在铅垂方向上向掩模11进行接近移动。在此期间,基于掩模标记112与基板标记121的距离来移动基板12的位置,标记间距离变短。
47.当掩模11与基板12的铅垂方向上的距离成为景深前端距离以下时,降低基板12向掩模11进行接近移动的速度。在此期间,精密地算出掩模标记112与基板标记121的距离,基于该距离来移动基板12的位置,精密地进行对准,在掩模11与基板12的位置一致时将掩模
11与基板12紧贴。
48.参照图4,说明如上那样构成的本实施方式的对准装置进行的对准处理。需要说明的是,以下说明的对准处理根据用户的开始对准的指示来开始。需要说明的是,在开始对准之前,掩模11被保持于掩模台2,基板12被保持于基板支架,以使掩模标记112和基板标记121落入相机3的拍摄范围的方式进行调整
49.在步骤s1中,控制部4控制基板支架来开始使基板12以规定的高速度接近掩模11的高速接近移动。在执行步骤s1的处理之后,控制部4执行步骤s2的处理。
50.在步骤s2中,控制部4针对相机3拍摄到的图像的基板标记121来进行图像处理,确定基板标记121的位置。在执行步骤s2的处理之后,控制部4执行步骤s3的处理。
51.在步骤s3中,控制部4算出基板标记121与掩模标记112的距离。在执行步骤s3的处理之后,控制部4执行步骤s4的处理。
52.在步骤s4中,控制部4进行使基板12移动到基于基板标记121与掩模标记112的距离而决定的位置上的定位移动。在执行步骤s4的处理之后,控制部4执行步骤s5的处理。
53.在步骤s5中,控制部4判定基板12与掩模11的铅垂方向上的距离是否为景深前端距离以下。
54.在判定为基板12与掩模11的铅垂方向上的距离不为景深前端距离以下的情况下,控制部4将处理返回到步骤s2来反复进行处理。在判定为基板12与掩模11的铅垂方向上的距离为景深前端距离以下的情况下,控制部4执行步骤s6的处理。
55.在步骤s6中,控制部4控制基板支架来开始使基板12以比高速接近移动慢的速度接近掩模11的接近移动。该接近移动持续进行至在后述的步骤s10中判定为基板12与掩模11紧贴为止。在执行步骤s6的处理之后,控制部4执行步骤s7的处理。
56.在步骤s7中,控制部4针对相机3拍摄到的图像的基板标记121和掩模标记112进行图像处理,确定基板标记121和掩模标记112的位置。在执行步骤s7的处理之后,控制部4执行步骤s8的处理。
57.在步骤s8中,控制部4算出基板标记121与掩模标记112的距离。在执行步骤s8的处理之后,控制部4执行步骤s9的处理。
58.在步骤s9中,控制部4进行使基板12移动到基于基板标记121与掩模标记112的距离而决定的位置上的定位移动。在执行步骤s9的处理之后,控制部4执行步骤s10的处理。
59.在步骤s10中,控制部4判定基板12与掩模11是否紧贴。
60.在判定为基板12与掩模11没有紧贴的情况下,控制部4将处理返回到步骤s7来反复进行处理。在判定为基板12与掩模11紧贴的情况下,控制部4结束对准处理。
61.参照图5来说明基于这样的对准处理进行的动作。如图5的(a)所示,在基板12离掩模11比图中h所示的相机3的景深的前端还远的情况下,执行粗略对准,在基板12以规定的高速度向掩模11进行接近移动的期间,基于基板标记121与掩模标记112的距离来移动基板12,由此基板标记121与掩模标记112靠近,基板12与掩模11的位置也靠近。
62.如图5的(b)所示,当基板12接近掩模11至图中h所示的相机3的景深的前端时,执行精密对准,使基板12比粗略对准慢地向掩模11进行接近移动,在此期间,精度良好地算出基板标记121与掩模标记112的距离,并基于该距离来移动基板12,由此基板标记121与掩模标记112靠近,基板12与掩模11的位置也靠近。
63.如图5的(c)所示,在基板12与掩模11马上要紧贴之前,基板标记121与掩模标记112精度良好地靠近,在基板12与掩模11紧贴时,基板标记121与掩模标记112的中心一致,基板12与掩模11的水平方向上的位置一致。
64.这样,在本实施方式中,在掩模11与基板12的铅垂方向上的距离比景深前端距离长的情况下,一边使基板12进行高速接近移动一边基于基板标记121与掩模标记112的距离来调整掩模11与基板12的水平方向上的位置,在掩模11与基板12的铅垂方向上的距离为景深前端距离以下的情况下,一边使基板12比高速接近移动慢地进行接近移动一边基于基板标记121与掩模标记112的距离来调整掩模11与基板12的水平方向上的位置。
65.由此,一边使基板12移动一边进行基板标记121与掩模标记112的距离的算出、基板12的位置调整,因此能够缩短从开始对准到掩模11与基板12紧贴为止花费的时间。
66.另外,在掩模11与基板12的铅垂方向上的距离比景深前端距离长的情况下,通过粗略对准大致地进行对准,在掩模11与基板12的铅垂方向上的距离成为景深前端距离以下时精密地进行对准,因此能够精度良好地使掩模11与基板12的位置一致。
67.另外,由于在使掩模11与基板12紧贴的时间点下对准完成,因此掩模11与基板12的接触次数一次即可,能够防止对基板12造成损伤。
68.另外,利用与掩模11和基板12的铅垂方向上的距离对应的修正值,对掩模11与基板12的定位进行修正,因此能够精度良好地使掩模11与基板12的位置一致。
69.作为本实施方式的第一变形例,设计成图1中的控制部4首先使基板12接近掩模11至图中h所示的景深的前端的位置并在这之后进行精密对准。控制部4基于存储好的景深前端距离来使基板12接近掩模11至景深的前端的位置。
70.参照图6来说明以上那样构成的本实施方式的第一变形例的对准装置进行的对准处理。需要说明的是,以下说明的对准处理根据用户的开始对准的指示来开始。
71.在步骤s21中,控制部4控制基板支架来使基板12进行接近移动至从掩模11起景深前端距离为止。在执行步骤s21的处理之后,控制部4执行步骤s6的处理。
72.与前述的步骤s6~步骤s10同样地,在步骤s6~步骤s10中,控制部4控制基板支架来开始接近移动,进行基板标记121和掩模标记112的图像处理,算出基板标记121与掩模标记112的距离,并基于该距离使基板12进行定位移动,判定基板12与掩模11是否紧贴,在判定为基板12与掩模11没有紧贴的情况下,将处理返回到步骤s7来重复进行处理,在判定为基板12与掩模11紧贴的情况下,结束对准处理。
73.这样,在本实施方式的第一变形例中,不进行粗略对准,因此能够进一步缩短从开始对准到掩模11与基板12紧贴为止花费的时间。
74.作为本实施方式的第二变形例,图1中的控制部4利用基板支架来使基板12进行步进(step)移动。控制部4在粗略对准中将步进移动距离及步进移动速度都设得大,在精密对准中对步进移动距离及步进移动速度都进行抑制。
75.参照图7来说明以上那样构成的本实施方式的第二变形例的对准装置进行的对准处理。需要说明的是,以下说明的对准处理根据用户的开始对准的指示来开始。
76.在步骤s31中,控制部4控制基板支架来使基板12以规定的长行程(stroke)向掩模11进行接近步进移动。在执行步骤s31的处理之后,控制部4执行步骤s2的处理。
77.与前述的步骤s2~步骤s5同样地,在步骤s2~步骤s5中,控制部4进行基板标记
121的图像处理,算出基板标记121与掩模标记112的距离,并基于该距离来使基板12进行定位移动,判定基板12与掩模11的铅垂方向上的距离是否为景深前端距离以下,在判定为基板12与掩模11的铅垂方向上的距离不为景深前端距离以下的情况下,将处理返回到步骤s31来反复进行处理,在判定为基板12与掩模11的铅垂方向上的距离为景深前端距离以下的情况下,执行步骤s32的处理。
78.在步骤s32中,控制部4利用行程比步骤s31的行程短且移动速度也慢的接近步进移动来使基板12接近掩模11。在执行步骤s32的处理之后,控制部4执行步骤s7的处理。
79.与前述的步骤s7~步骤s10同样地,在步骤s7~步骤s10中,控制部4进行基板标记121与掩模标记112的图像处理,算出基板标记121与掩模标记112的距离,并基于该距离来使基板12进行定位移动,判定基板12与掩模11是否紧贴,在判定为基板12与掩模11没有紧贴的情况下,将处理返回到步骤s32来反复进行处理,在判定为基板12与掩模11紧贴的情况下,结束对准处理。
80.这样,在本实施方式的第二变形例中,在使掩模11与基板12接近时,使基板12进行步进移动,在粗略对准中将步进移动距离及步进移动速度都设得大,在精密对准中对步进移动距离及步进移动速度都进行抑制。
81.由此,一边使基板12移动一边进行基板标记121与掩模标记112的距离的算出、基板12的位置调整,因此能够缩短从开始对准到掩模11与基板12紧贴为止花费的时间。
82.虽然公开了本发明的实施方式,但对本领域技术人员来说,知晓能够在不脱离本发明的范围的情况下施加变更。意在将这样的修正及等价物全都包含在本发明的范围内。
83.符号说明
84.1 成膜装置
85.2 掩模台
86.3 相机(拍摄部)
87.4 控制部
88.11 掩模
89.12 基板
90.112 掩模标记
91.121 基板标记
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。