1.本发明涉及一种洒水智能控制系统及方法,更具体的说,尤其涉及一种道路绿化洒水智能控制系统及方法。
背景技术:
2.随着城市的迅速发展,智能绿化越来越受关注,随着国内外信息技术的不断进步,以计算机为控制核心、多传感器融合为触手的自动化技术也被应用于智能绿化领域。在以往的道路绿化浇水喷洒作业时,通常是园林工人利用洒水车来对道路绿化进行浇水,通常是一个人开车一个人控制洒水方向与水流量,甚至有的边开车边洒水,这就带来了很大的安全隐患,并且工作负荷大,效率低。
3.目前绿化普遍使用的道路绿化洒水车,其原理是采用内置泵的将水从水罐内部抽取至喷水口,再将水喷出对道路两旁的绿化做浇灌,不能确切的根据植物实际的需水量来进行灌溉,这就导致不同植物种类和密度的区域不能得到最优的水资源分配,不仅造成了水资源浪费,而且工作效率低下;在多洒水车的调度问题上也存在很大缺陷,传统的根据人工经验进行划分的作业路线区域,通过保持绿化洒水车足够的作业频率满足绿化洒水作业需求,但是不同绿化带由于不同种类植物、不同生长状况,需水量也不同,使得绿化洒水车每次作业时有效作业效率低下,从而造成了人力、油耗等资源浪费。综上,因此有必要设计一种智能道路绿化洒水系统,解决上述存在的问题。。
技术实现要素:
4.本发明为了克服上述技术问题的缺点,提供了一种道路绿化洒水智能控制系统及方法。
5.本发明的道路绿化洒水智能控制系统,包括经5g网络互相通信的云端服务平台、洒水车作业端和无线传感器终端,无线传感器终端用于采集道路绿化区域的土壤信息,云端服务平台接收无线传感器终端上传的土壤信息并规划出洒水路径和洒水量,洒水车作业端根据云端服务平台规划的洒水路径和洒水量进行洒水作业;其特征在于:所述无线传感器终端由主控芯片及与其相连接的土壤温湿度传感器、土壤氮磷钾传感器和5g通信模块组成,主控芯片经土壤温湿度传感器采集土壤的温湿度,经土壤氮磷钾传感器采集土壤中氮、磷、钾含量,经5g通信模块将采集的土壤温湿度和氮磷钾含量上传至云端服务平台;
6.所述洒水车作业端由洒水车、主控制器及与主控制器相连接的触摸显示屏、5g通讯模块、北斗定位模块、智能电磁水流量计、智能出水枪和摄像头组成,触摸显示屏设置于洒水车的驾驶内,摄像头安装于洒水车的后端,智能电磁水流量计和智能出水枪设置于洒水车的出水管路上;触摸显示屏用于显示云端服务平台下发的洒水路径,主控制器经北斗定位模块获取自身的位置信息,经智能电磁水流量计检测出水量,经智能出水枪控制洒水方向和洒水量,经摄像头采集绿化植物的图像信息,经5g通讯模块将洒水量和植物图像信息上传至云端服务平台。
7.本发明的道路绿化洒水智能控制系统的洒水控制方法,其特征在于,通过以下步骤来实现:
8.a).建立植被需水档案,集合待洒水道路所种植植被的种类、密度、生长状况,构建不同位置处所需灌溉植被的需水档案;
9.b).生成植被需水热点图,无线传感器终端经设置于道路绿化土壤中的各个土壤温湿度传感器和土壤氮磷钾传感器采集不同区域的土壤湿度和土壤氮磷钾含量信息,并将其上传至云端服务平台;云端服务平台根据不同植被的所需的土壤湿润度、实际检测到的土壤温湿度以及需水档案,生成植被需水的热点图;
10.c).规划洒水路径,云端服务平台根据洒水车的数量、载水量以及建立的植被需水的热点图,规划出在建议速度v下每辆洒水车的洒水路径,并将规划的洒水路径和建议速度v下发至洒水车;
11.d).洒水作业,洒水车按照规划的洒水路径并根据植被需水的热点图对道路绿化植被进行洒水作业,具体的洒水作业方法为:
12.d-1).喷洒方向控制,洒水车中的主控制器根据北斗定位模块获取洒水车的位置坐标和航向,计算出绿化带与洒水车的距离和角度,进而调节智能出水枪的喷水方向,以使出水能够精准的喷洒到道路绿化带中;
13.d-2).喷水量控制,根据洒水车的位置坐标和植被需水的热点图计算出智能出水枪的出水量,控制洒水车按照确定的喷水方向和出水量对绿化带内的植物进行喷水作业;
14.d-3).喷水量调节,如果洒水车按照建议速度v行驶,则按照步骤d-2)确定的喷水量进行洒水;如果洒水车行驶速度低于v,则增加喷水量,如果洒水车行驶速高于v,则降低喷水量;
15.e).图像采集和上传,洒水车在喷水灌溉的过程中,经后端的摄像头实时采集绿化带内植物的图像信息,并上传至云端服务平台;
16.f).病虫害判断,绿化管理人员或专家通过观察上传的植物实时图像画面,观察植被的生长情况以及病虫害情况,如果出现病虫害现象,则采取病虫害的治疗措置。
17.本发明的道路绿化洒水智能控制系统的洒水控制方法,步骤c)所述的规划洒水路径具体通过以下步骤来实现:
18.c-1).定义有向边和顶点,以交叉路口为界限,把一条路分成不同的路段,每个路段看成一个街道,作为洒水作业的基本单元,交叉路口为有向图中的顶点;每个路段按照靠右行车的规则形成两条有向道路,有向道路为有向图中的有向边或弧;
19.c-2).建立有向图,根据步骤c-1)所定义的待洒水道路的顶点、有向边或弧,建立一个连通的有向图g(n,a),n为顶点结合,a为有向边或弧的集合;每个有向边有两个权重:w(e)和q(e),e∈a,w(e)表示边的长度,q(e)表示边上绿化带需水量;
20.c-3).建立约束条件,假设绿化洒水中心在点t处,共有m辆车,每辆绿化洒水车的载水量上限记为q,并且绿化洒水车载重能力能够满足绿化洒水作业需求,即:
[0021][0022]
这样就把最优路径问题,转化成了找到m辆洒水车每个所对应的有向回路ci,i=1,2,...,m,每个有向回路需满足如下四个条件:
[0023]
条件1:有向回路的起点与终点均为绿化洒水中心,t∈ci;
[0024]
条件2:每个边e都要至少属于m个有向回路中一条;
[0025]
条件3:每个有向回路满足绿化洒水车载重能力,即:
[0026][0027]
条件4:满足最小路径条件,即所有的有向回路长度和最小,即:
[0028][0029]
c-4).判断图g是否为欧拉图,根据定理一个多重连通图是欧拉图得充分必要条件是图中无奇点,来判断图g是否为欧拉图;如果为欧拉图转至步骤c-7),如果为非欧拉图执行步骤c-5);
[0030]
c-5).建立欧拉图,找出图g中的所有的奇点,两两配对,而每对奇点之间必有一条通路,把这条通路上的所有边作为重复边追加到图g中,这样得到的新连通图必为无奇点的欧拉图;
[0031]
c-6).欧拉图处理,如果图g中某条边上的重复边多于一条,则从重复边中去掉偶数条,使得其重复边至多为一条;
[0032]
c-7).建立最优洒水路径,检查图g中的每一有向回路,如果每一个有向回路的重复边的总长不大于该有向回路总长的一半,则已经求得最优洒水路径方案;否则,将这个有向回路中的重复边去掉,再将该有向回路中原来没有重复边的各边加上重复边,其它各有向回路的边不变,返回步骤c-5),直至得到一个在最优的洒水路线上图g的每一条边至多有一条重复边,并且每一个有向回路的重复边总权重小于或等于该有向回路总权重的一半;
[0033]
c-8).路径优化,得到了最优洒水路线后,在不超过每辆绿化洒水车的载水量上限q的基础上对最优洒水路线进行划分,每个有向回路的工作量满足洒水车的载水量上限q;
[0034]
c-9).路径下发,将最优路径通过5g通讯模块下发给每辆绿化洒水车。
[0035]
本发明的有益效果是:本发明的道路绿化洒水智能控制系统及方法,根据道路绿化植被需水程度检测获取到的土壤温湿度数据,结合建立的植被需水档案,生成最优绿化洒水路线,这大大提高了绿化洒水作业的效率,有利于将水源及时补给到最急需的植被,进而提高植被成活率。本发明的道路绿化洒水智能控制系统及方法,实现了车辆位置实时监测以及出水量检测,最终实现智能洒水枪的方位出水口自动控制,并且可以将采集到的植被图像数据上传到云端,云端根据植被特征数据,可以及时辨别植被生长状况和虫害情况,进而实现早发现,早处理的目标;综上本发明的道路绿化洒水智能控制系统及方法不仅实现了最优的绿化带浇灌方案,还提供了绿化植被生长状况的远程监控功能,大大提高绿化洒水效率,减轻工作人员的工作负担,提高绿化植被成活率。
附图说明
[0036]
图1为本发明的道路绿化洒水智能控制系统的原理框图;
[0037]
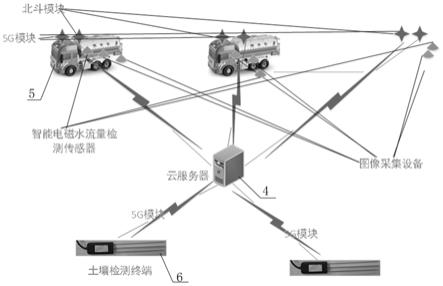
图2为本发明的道路绿化洒水智能控制系统的网络结构图;
[0038]
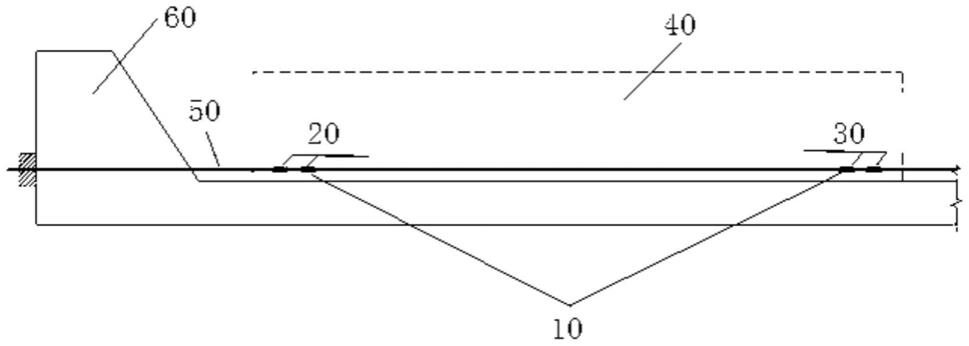
图3为本发明中洒水车的结构示意图;
[0039]
图4为本发明中无线传感器终端的原理图;
[0040]
图5为本发明中洒水车作业端的原理图。
[0041]
图中:1云端服务平台,2洒水车作业端,3无线传感器终端,4云服务器,5洒水车,6土壤检测终端,7主控芯片,8土壤温湿度传感器,9土壤氮磷钾传感器,10 5g通讯模块,11主控制器,12触摸显示屏,13 5g通讯模块,14北斗定位模块,15智能电磁水流量计,16智能出水枪,17摄像头。
具体实施方式
[0042]
下面结合附图与实施例对本发明作进一步说明。
[0043]
如图1所示,给出了本发明的道路绿化洒水智能控制系统的原理框图,其由云端服务平台1、洒水车作业端2和无线传感器终端3组成,无线传感器3终端用于采集道路绿化区域的土壤信息(土壤温湿度和土壤中的氮磷钾含量),云端服务平台1接收无线传感器终端上传的土壤信息并规划出洒水路径和洒水量,洒水车作业端2根据云端服务平台规划的洒水路径和洒水量进行洒水作业。
[0044]
如图2所示,给出了发明的道路绿化洒水智能控制系统的网络结构图,所示的云端服务平台1由云服务器4构成,洒水车作业端2由洒水车5构成,所示的土壤检测终端6包括土壤温湿度传感器8和土壤氮磷钾传感器9,以实现对土壤温湿度和土壤氮磷钾含量信息的采集。
[0045]
如图3所示,给出了本发明中洒水车的结构示意图,所示洒水车5的前端设置有北斗定位模块14,后端设置有摄像头17和智能出水枪16。
[0046]
如图4所示,给出了本发明中无线传感器终端的原理图,无线传感器终端3由主控芯片7及与其相连接的土壤温湿度传感器8、土壤氮磷钾传感器9和5g通信模块10组成,主控芯片7经土壤温湿度传感器8采集土壤的温湿度,经土壤氮磷钾传感器9采集土壤中氮、磷、钾含量,经5g通信模块10将采集的土壤温湿度和氮磷钾含量上传至云端服平台1。
[0047]
无线传感器终端3的数量为多个,设置于道路绿化带中的土壤中,主控芯片7选用国产sigmstarssd202d芯片,芯片拥有4路串口以及一路usb口,且成本较低稳定性好。主控芯片7设置2路rs485电路,分别连接土壤温湿度传感器8和土壤氮磷钾传感器9,来定时采集土壤温湿度与土壤氮磷钾含量信息,可以每日多时段分别采集传感器数据在进行均值化数据处理;无线传感器终端对应其安装的具体位置信息,每隔一段时间系统通过5g模块将处理过的传感器数据加上位置信息上传至云端服务平台,当传感器不工作时转入待机模式,最大化的减少电量消耗,通过以上功能来实现无线传感器终端的搭建。
[0048]
如图5所示,给出了本发明中洒水车作业端的原理图,洒水车作业端2由洒水车5、主控制器11及与主控制器11相连接的触摸显示屏12、5g通讯模块13、北斗定位模块14、智能电磁水流量计15、智能出水枪16和摄像头17组成,触摸显示屏12设置于洒水车的驾驶内,摄像头17安装于洒水车5的后端,智能电磁水流量15计和智能出水枪16设置于洒水车5的出水管路上。触摸显示屏12用于显示云端服务平台1下发的洒水路径,主控制器11经北斗定位模块14获取自身的位置信息,经智能电磁水流量计15检测出水量,经智能出水枪16控制洒水方向和洒水量,经摄像头17采集绿化植物的图像信息,经5g通讯模块13将洒水量和植物图像信息上传至云端服务平台1。
[0049]
触摸显示屏12负责人机交互的作用,云端(云端服务平台1)向洒水车下发最优路径消息后,触摸显示屏12负责将推荐路线显示出来并进行导航,界面还包括洒水启停与出
水速度显示。北斗定位模块14,接收绿化洒水车的实时位置信息,辅助实现车辆导航与图片定位信息标注功能。摄像头17负责采集洒水区域植被生长信息情况,植被信息采集的重要方式是通过智能绿化洒水车所安装的摄像头来实现的,在智能绿化洒水车进行作业时,车载的摄像头实时的采集绿化带植被的信息,通过车载的北斗定位系统,将图片信息添加上经纬度,达到绿化植被位置的定位,便于工作人员远程的初步分析植被的生长情况,实现植被的远程图像监控,监视水流的走势,根据识别到的喷洒位置调节出水口方向,实现更加精准的喷水灌溉作业。智能电磁水流量计15检测实时检测出水的流量,结合车速与灌溉面积来调节出水量的大小。智能出水枪16选取得是市面上成熟得智能出水枪系统,功能包括,可以控制调节出水口的方向与开关。5g通讯模块13可选用华为5g巴龙5000-31,实现洒水车作业端2与云端服务平台1的数据交互,为整个系统得数据交互提供保障。
[0050]
云端服务平台1生成最优洒水路径是云端服务平台管理应用中的核心问题,最优洒水路径直接影响着洒水绿化成本和配送效率,解决最优绿化洒水路径问题对云端服务平台具有重要的现实意义。绿化洒水中由多辆洒水车共同完成辖区内洒水作业,也就是多个车辆都从绿化环卫中心出发,经过若干街道,完成绿化洒水作业任务,回到绿化环卫中心,要求有需要洒水绿化带的道路都至少有一辆绿化洒水车经过1次。优化洒水路径的目标是在满足洒水车水量载重限制的前提下,使得总路程最短,洒水路径要求每个有洒水需求的绿化带道路都要在某个绿化洒水车的路径中,也就是对应边至少包含在某个圈中边。为了方便处理,本发明中把问题转化为图论中的问题。
[0051]
以交叉路口为界限,把一条路分成不同的路段,每个路段看成一个街道,作为洒水作业的基本单元。大多数道路上绿化带分布于道路两边,因而在洒水作业时时假设先完成一边的洒水作业再进行另一边洒水作业,不考虑中间向两侧直接洒水的方案,这样可以把其看成两条不同的道路。以道路路口为点,如果两个路口中间的街道一边上有需要洒水的绿化带就在对应两点之间画条有向边,边的方向与车行驶方向一致。如果道路两边都有客户,则画两条边,无需洒水的街道就空下来不画。
[0052]
本发明的道路绿化洒水智能控制系统的洒水控制方法,通过以下步骤来实现:
[0053]
a).建立植被需水档案,集合待洒水道路所种植植被的种类、密度、生长状况,构建不同位置处所需灌溉植被的需水档案;
[0054]
b).生成植被需水热点图,无线传感器终端经设置于道路绿化土壤中的各个土壤温湿度传感器和土壤氮磷钾传感器采集不同区域的土壤湿度和土壤氮磷钾含量信息,并将其上传至云端服务平台;云端服务平台根据不同植被的所需的土壤湿润度、实际检测到的土壤温湿度以及需水档案,生成植被需水的热点图;
[0055]
该步骤中,进行植被需水程度评价,如果需要洒水,系统给出带有定位坐标位置的需水量,生成当前目标区域的需水热点图。
[0056]
c).规划洒水路径,云端服务平台根据洒水车的数量、载水量以及建立的植被需水的热点图,规划出在建议速度v下每辆洒水车的洒水路径,并将规划的洒水路径和建议速度v下发至洒水车;
[0057]
该步骤中,所述的规划洒水路径具体通过以下步骤来实现:
[0058]
c-1).定义有向边和顶点,以交叉路口为界限,把一条路分成不同的路段,每个路段看成一个街道,作为洒水作业的基本单元,交叉路口为有向图中的顶点;每个路段按照靠
右行车的规则形成两条有向道路,有向道路为有向图中的有向边或弧;
[0059]
c-2).建立有向图,根据步骤c-1)所定义的待洒水道路的顶点、有向边或弧,建立一个连通的有向图g(n,a),n为顶点结合,a为有向边或弧的集合;每个有向边有两个权重:w(e)和q(e),e∈a,w(e)表示边的长度,q(e)表示边上绿化带需水量;
[0060]
c-3).建立约束条件,假设绿化洒水中心在点t处,共有m辆车,每辆绿化洒水车的载水量上限记为q,并且绿化洒水车载重能力能够满足绿化洒水作业需求,即:
[0061][0062]
这样就把最优路径问题,转化成了找到m辆洒水车每个所对应的有向回路ci,i=1,2,...,m,每个有向回路需满足如下四个条件:
[0063]
条件1:有向回路的起点与终点均为绿化洒水中心,t∈ci;
[0064]
条件2:每个边e都要至少属于m个有向回路中一条;
[0065]
条件3:每个有向回路满足绿化洒水车载重能力,即:
[0066][0067]
条件4:满足最小路径条件,即所有的有向回路长度和最小,即:
[0068][0069]
c-4).判断图g是否为欧拉图,根据定理一个多重连通图是欧拉图得充分必要条件是图中无奇点,来判断图g是否为欧拉图;如果为欧拉图转至步骤c-7),如果为非欧拉图执行步骤c-5);
[0070]
c-5).建立欧拉图,找出图g中的所有的奇点,两两配对,而每对奇点之间必有一条通路,把这条通路上的所有边作为重复边追加到图g中,这样得到的新连通图必为无奇点的欧拉图;
[0071]
c-6).欧拉图处理,如果图g中某条边上的重复边多于一条,则从重复边中去掉偶数条,使得其重复边至多为一条;
[0072]
c-7).建立最优洒水路径,检查图g中的每一有向回路,如果每一个有向回路的重复边的总长不大于该有向回路总长的一半,则已经求得最优洒水路径方案;否则,将这个有向回路中的重复边去掉,再将该有向回路中原来没有重复边的各边加上重复边,其它各有向回路的边不变,返回步骤c-5),直至得到一个在最优的洒水路线上图g的每一条边至多有一条重复边,并且每一个有向回路的重复边总权重小于或等于该有向回路总权重的一半;
[0073]
c-8).路径优化,得到了最优洒水路线后,在不超过每辆绿化洒水车的载水量上限q的基础上对最优洒水路线进行划分,每个有向回路的工作量满足洒水车的载水量上限q;
[0074]
c-9).路径下发,将最优路径通过5g通讯模块下发给每辆绿化洒水车。
[0075]
d).洒水作业,洒水车按照规划的洒水路径并根据植被需水的热点图对道路绿化植被进行洒水作业,具体的洒水作业方法为:
[0076]
d-1).喷洒方向控制,洒水车中的主控制器根据北斗定位模块获取洒水车的位置坐标和航向,计算出绿化带与洒水车的距离和角度,进而调节智能出水枪的喷水方向,以使出水能够精准的喷洒到道路绿化带中;
[0077]
d-2).喷水量控制,根据洒水车的位置坐标和植被需水的热点图计算出智能出水
枪的出水量,控制洒水车按照确定的喷水方向和出水量对绿化带内的植物进行喷水作业;
[0078]
d-3).喷水量调节,如果洒水车按照建议速度v行驶,则按照步骤d-2)确定的喷水量进行洒水;如果洒水车行驶速度低于v,则增加喷水量,如果洒水车行驶速高于v,则降低喷水量;
[0079]
e).图像采集和上传,洒水车在喷水灌溉的过程中,经后端的摄像头实时采集绿化带内植物的图像信息,并上传至云端服务平台;
[0080]
f).病虫害判断,绿化管理人员或专家通过观察上传的植物实时图像画面,观察植被的生长情况以及病虫害情况,如果出现病虫害现象,则采取病虫害的治疗措置。
[0081]
可见,本发明的道路绿化洒水智能控制系统及方法,目的在于提供一种道路绿化洒水车智能控制系统,系统能够克服现有技术的上述缺陷,大大提高绿化洒水效率,减轻工作人员的工作负担,提高绿化植被成活率。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。