技术特征:
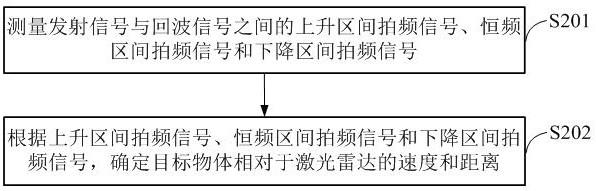
1.一种用于激光雷达的距离速度确定方法,其特征在于,包括:测量发射信号与回波信号之间的上升区间拍频信号、恒频区间拍频信号和下降区间拍频信号,其中,所述发射信号和所述回波信号均包括上升区间、恒频区间和下降区间,所述上升区间为激光的频率线性增加的波形区间,所述下降区间为所述激光的频率线性减小的波形区间,所述恒频区间为所述激光在无调制下的频率恒定的波形区间,所述恒频区间拍频信号用于表征激光在无调制下目标物体相对于所述激光雷达的速度引起的多普勒频移;根据所述上升区间拍频信号、所述恒频区间拍频信号和所述下降区间拍频信号,确定所述目标物体相对于所述激光雷达的速度和距离。2.根据权利要求1所述的用于激光雷达的距离速度确定方法,其特征在于,所述根据所述上升区间拍频信号、所述恒频区间拍频信号和所述下降区间拍频信号,确定所述目标物体相对于所述激光雷达的速度和距离,包括:根据所述上升区间拍频信号和所述下降区间拍频信号,确定所述目标物体相对于所述激光雷达的运动状态;根据所述目标物体相对于所述激光雷达的运动状态、所述上升区间拍频信号、所述恒频区间拍频信号和所述下降区间拍频信号,确定变频区间拍频信号,其中,所述变频区间拍频信号用于表征所述上升区间和所述下降区间对应的激光调制下所述目标物体相对于所述激光雷达的距离引起的多普勒频移;至少根据所述目标物体相对于所述激光雷达的运动状态、所述恒频区间拍频信号和所述变频区间拍频信号,确定所述目标物体相对于所述激光雷达的速度和距离。3.根据权利要求2所述的用于激光雷达的距离速度确定方法,其特征在于,所述根据所述上升区间拍频信号和所述下降区间拍频信号,确定所述目标物体相对于所述激光雷达的运动状态,包括:若所述上升区间拍频信号小于所述下降区间拍频信号,则确定所述目标物体正在远离所述激光雷达;若所述上升区间拍频信号大于所述下降区间拍频信号,则确定所述目标物体正在靠近所述激光雷达。4.根据权利要求3所述的用于激光雷达的距离速度确定方法,其特征在于,所述根据所述目标物体相对于所述激光雷达的运动状态、所述上升区间拍频信号、所述恒频区间拍频信号和所述下降区间拍频信号,确定变频区间拍频信号,包括:若所述目标物体正在远离所述激光雷达,则根据所述下降区间拍频信号和所述恒频区间拍频信号,确定所述变频区间拍频信号;若所述目标物体正在靠近所述激光雷达,则根据所述上升区间拍频信号和所述恒频区间拍频信号,确定所述变频区间拍频信号。5.根据权利要求4所述的用于激光雷达的距离速度确定方法,其特征在于,所述根据所述下降区间拍频信号和所述恒频区间拍频信号,确定所述变频区间拍频信号,包括:计算所述下降区间拍频信号与所述恒频区间拍频信号的差值,作为所述变频区间拍频信号;所述根据所述上升区间拍频信号和所述恒频区间拍频信号,确定所述变频区间拍频信号,包括:
计算所述上升区间拍频信号和所述恒频区间拍频信号的差值,作为所述变频区间拍频信号。6.根据权利要求2所述的用于激光雷达的距离速度确定方法,其特征在于,所述至少根据所述目标物体相对于所述激光雷达的运动状态、所述恒频区间拍频信号和所述变频区间拍频信号,确定所述目标物体相对于所述激光雷达的速度和距离,包括:根据所述目标物体相对于所述激光雷达的运动状态、所述恒频区间拍频信号、所述变频区间拍频信号、所述上升区间拍频信号和所述下降区间拍频信号,确定所述目标物体相对于所述激光雷达的速度和距离。7.根据权利要求6所述的用于激光雷达的距离速度确定方法,其特征在于,所述根据所述目标物体相对于所述激光雷达的运动状态、所述恒频区间拍频信号、所述变频区间拍频信号、所述上升区间拍频信号和所述下降区间拍频信号,确定所述目标物体相对于所述激光雷达的速度和距离,包括:计算所述变频区间拍频信号与所述恒频区间拍频信号的差值,其中,所述差值用于确定所述上升区间拍频信号或所述下降区间拍频信号的符号;根据所述目标物体相对于所述激光雷达的运动状态、所述差值、所述上升区间拍频信号和所述下降区间拍频信号,确定所述目标物体相对于所述激光雷达的速度和距离。8.根据权利要求7所述的用于激光雷达的距离速度确定方法,其特征在于,所述根据所述目标物体相对于所述激光雷达的运动状态、所述差值、所述上升区间拍频信号和所述下降区间拍频信号,确定所述目标物体相对于所述激光雷达的速度和距离,包括:在所述目标物体正在远离所述激光雷达的情况下:若所述差值小于或等于0,则根据所述下降区间拍频信号与所述上升区间拍频信号的差值,确定所述目标物体相对于所述激光雷达的距离,并根据所述下降区间拍频信号与所述上升区间拍频信号的和,确定所述目标物体相对于所述激光雷达的速度;若所述差值大于0,则根据所述下降区间拍频信号与所述上升区间拍频信号的和,确定所述目标物体相对于所述激光雷达的距离,并根据所述下降区间拍频信号与所述上升区间拍频信号的差值,确定所述目标物体相对于所述激光雷达的速度。9.根据权利要求7所述的用于激光雷达的距离速度确定方法,其特征在于,所述根据所述目标物体相对于所述激光雷达的运动状态、所述差值、所述上升区间拍频信号和所述下降区间拍频信号,确定所述目标物体相对于所述激光雷达的速度和距离,包括:在所述目标物体正在靠近所述激光雷达的情况下:若所述差值小于或等于0,则根据所述上升区间拍频信号与所述下降区间拍频信号的差值,确定所述目标物体相对于所述激光雷达的距离,并根据所述下降区间拍频信号与所述上升区间拍频信号的和的相反数,确定所述目标物体相对于所述激光雷达的速度;若所述差值大于0,则根据所述上升区间拍频信号与所述下降区间拍频信号的和,确定所述目标物体相对于所述激光雷达的距离,并根据所述下降区间拍频信号与所述上升区间拍频信号的差值,确定所述目标物体相对于所述激光雷达的速度。10.一种用于激光雷达的距离速度确定装置,其特征在于,包括:信号测量模块和距离速度计算模块;所述信号测量模块,用于测量发射信号与回波信号之间的上升区间拍频信号、恒频区
间拍频信号和下降区间拍频信号,其中,所述发射信号和所述回波信号均包括上升区间、恒频区间和下降区间,所述上升区间为激光的频率线性增加的波形区间,所述下降区间为所述激光的频率线性减小的波形区间,所述恒频区间为所述激光在无调制下的频率恒定的波形区间,所述恒频区间拍频信号用于表征激光在无调制下目标物体相对于所述激光雷达的速度引起的多普勒频移;所述距离速度计算模块,用于根据所述上升区间拍频信号、所述恒频区间拍频信号和所述下降区间拍频信号,确定所述目标物体相对于所述激光雷达的速度和距离。
技术总结
本申请提供了用于激光雷达的距离速度确定方法和装置,方法包括:测量发射信号与回波信号之间的上升区间拍频信号、恒频区间拍频信号和下降区间拍频信号;根据上升区间拍频信号、恒频区间拍频信号和下降区间拍频信号,确定目标物体相对于激光雷达的速度和距离。由于本申请能够测量出恒频区间拍频信号,在此基础上结合上升区间拍频信号和下降区间拍频信号,即能够正确地计算出目标物体相对于激光雷达的速度和距离。的速度和距离。的速度和距离。
技术研发人员:夏平杰 张邦宏
受保护的技术使用者:北京摩尔芯光科技有限公司
技术研发日:2022.04.06
技术公布日:2022/5/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。