1.本发明属于车载毫米波雷达技术领域,具体涉及一种车载毫米波雷达角度置信度估计方法。
背景技术:
2.随着人工智能的发展,汽车电子结合人工智能应用也逐渐实现从l1到l5的发展,而毫米波雷达由于具有穿透雾、烟、灰尘的能力强,具有全天候(大雨天除外)全天时的特点是汽车走向自动驾驶方向的不可或缺的部分,被广泛的应用到汽车电子上。毫米波雷达在国外已经有长达20年多年的历史,已经进入第五代的发展,而国产毫米波在2016年在正式问世,在性能方面还有国外有很大差距,国内关于毫米波雷达好多方面还处于研究探索阶段。且毫米波雷达区别于对空雷达和声呐等的研究,由于毫米波雷达主要应用到人为场景,而且目标信号变化没有规律,且毫米波雷达探测的场景有好多多径场现象。距离分辨率、速度分辨率、角度估计、角度分辨率是毫米波雷达的的重要参数,其中速度、距离是直接从fft的结果反应出来,而角度估计是进行二次估计计算的,与初次计算结果的正确性直接也影响到角度估计,其中角度置信度便是反应角度估计的正确性;角度置信度主要是对波束形成计算的角度方向的置信度进行评估,可以通过主副瓣能量差、主副瓣角度差、主瓣半功率点位置等方式计算角度的置信度,由于雷达天线结构不一定完全按照线性均匀布阵,造成这种方式的通用性比较差。
技术实现要素:
3.本发明的目的在于提供一种车载毫米波雷达角度置信度估计方法,以解决上述背景技术中提出的问题。
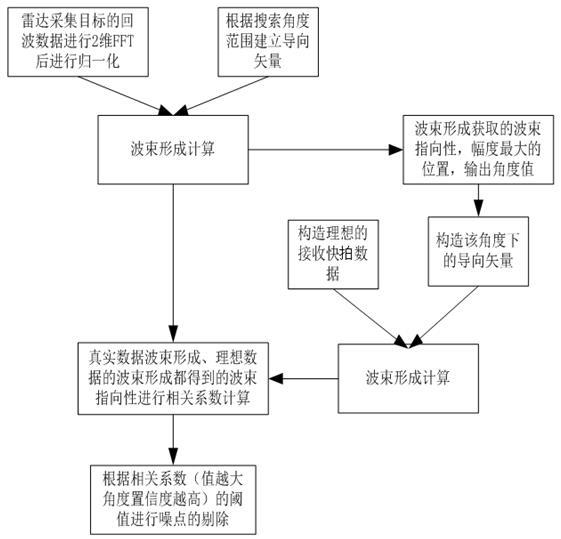
4.为实现上述目的,本发明提供如下技术方案:一种车载毫米波雷达角度置信度估计方法,包括如下步骤:1)雷达采集目标位置回波数据进行二维快速傅里叶变换后进行归一化;2)将归一化后的真实数据和导向矢量进行波束形成计算;3)经过波束形成计算后得到的波束指向性,找到幅度最大值的横坐标为目标所在的角度值;4)根据角度值以及雷达天线的布阵方式,构造所述角度值下的导向矢量;5)将构造的导向矢量和构造的接收快拍数据进行波束形成计算,得到所述角度值下理想的波束指向性;6)根据真实数据得到的波束指向性和理想的波束指向性进行相关系数计算,相关系数越大角度置信度越高;7)根据相关系数的阈值,进行噪点的剔除。
5.优选的,所述波束形成计算的具体步骤为:建立接收信号矢量模型:
为维阵列接收快拍数据矢量,;为维信号矢量,;为维导向矢量矩阵,;其中第个信号的导向矢量为:,,其中为波数,n为等间距线性阵个数,相邻阵元之间的间距为,为入射到空间阵列上的远场窄带信号个数,为波长;为信号的来波方向;则单一信号源:;对接收信号进行加权求和,加权后天线阵的输出为:,即波束指向性;其中:为波束形成的权矢量,表示共轭转置。
6.优选的,所述步骤6)中相关系数的计算方法为:其中,:样本1的第个值;:样本1的均值;:样本2的第个值;:样本2的均值;样本总数;且的绝对值介于,当越接近1,表示与两个变量之间的相关程度就越强,越接近于0,与两个变量之间的相关程度就越弱。
7.优选的,所述步骤7)中对相关系数小于0.4的噪点进行剔除。
8.优选的,所述步骤1)二维快速傅里叶变换的具体方法为先后对将雷达采集的目标位置回波数据的距离和角度进行快速傅里叶变换。
9.优选的,所述波束形成计算是通过雷达工具箱进行计算,所述雷达工具箱为nxpradartoolbox。
10.优选的,所述步骤1)中归一化是将二维快速傅里叶变换后的数据除以自身模值。
11.本发明的技术效果和优点:该车载毫米波雷达角度置信度估计方法,通过构造理想的信号,与真实信号的做对比,且相关系数计算使用波形的整个信息,使得角度置信度的准确性更高;计算量小,更加满足实时计算的要求;通用性强,不受天线阵的布阵结构方式影响。
附图说明
12.图1为本发明的流程图;图2为剔除前的雷达采集目标点的分布;图3为角度置信度的分布范围;图4为角度置信度剔除的噪点显示;图5为利用角度置信度剔除噪点后的目标点分布。
具体实施方式
13.下面结合附图对本发明的具体实施方式作进一步说明。在此需要说明的是,对于这些实施方式的说明用于帮助理解本发明,但并不构成对本发明的限定。此外,下面所描述的本发明各个实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互组合。
14.本发明提供了如图1所示的一种车载毫米波雷达角度置信度估计方法,包括如下步骤:步骤一、雷达采集目标位置回波数据进行二维快速傅里叶变换后进行归一化,具体为先后对将雷达采集的目标位置回波数据的距离和角度进行快速傅里叶变换,然后将二维快速傅里叶变换后的数据除以自身模值;步骤二、将归一化后的真实数据和导向矢量进入雷达工具箱进行波束形成计算,所述雷达工具箱为nxpradartoolbox;该导向矢量通过搜索角度范围建立;波束形成计算的具体步骤为:建立接收信号矢量模型:建立接收信号矢量模型:为维阵列接收快拍数据矢量,;为维信号矢量,;为维导向矢量矩阵,;其中第个信号的导向矢量为:,,其中为波数,n为等间距线性阵个数,相邻阵元之间的间距为,为入射到空间阵列上的远场窄带信号个数,为波长;为信号的来波方向;则单一信号源:;对接收信号进行加权求和,加权后天线阵的输出为:,即波束指向性;其中:为波束形成的权矢量,表示共轭转置。
15.步骤三、经过波束形成计算后得到的波束指向性,找到幅度最大值的横坐标为目标所在的角度值;步骤四、根据角度值以及雷达天线的布阵方式,构造所述角度值下的导向矢量;步骤五、将构造的导向矢量和构造的接收快拍数据进行波束形成计算,得到所述角度值下理想的波束指向性;步骤六、根据真实数据得到的波束指向性和理想的波束指向性进行相关系数计算,相关系数越大角度置信度越高;相关系数的计算方法为:其中,:样本1的第个值;:样本1的均值;:样本2的第个值;:样本2的
均值;样本总数;且的绝对值介于,当越接近1,表示与两个变量之间的相关程度就越强,越接近于0,与两个变量之间的相关程度就越弱。
16.当r=1,为完全正相关;r=-1,为完全负相关;当r=0,表示变量间不存在线性相关关系,但可能存在非线性关系;当-1≤r<0,表示变量间存在负相关关系;当0<r≤1,表示变量间存在正相关关系;当|r|>0.8,表示变量间存在高度相关关系;当0.5<|r|≤0.8,表示变量间存在中度相关关系;当0.3<|r|≤0.5,表示变量间存在低度相关关系;当|r|≤0.3,表示变量间不存在线性相关关系。
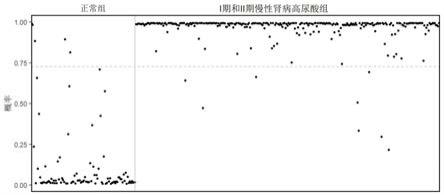
17.步骤七、根据相关系数的阈值,若小于阈值,进行噪点的剔除,本发明设置阈值为0.4;剔除前的雷达采集的目标点的分布如图2所示,角度置信度的分布范围如图3所示,通过角度置信度剔除的噪点如图4所示,通过角度置信度剔除噪点后的雷达采集的目标点的分布如图5,保留角度置信度高的目标点,使得雷达采集的目标点更加准确。
18.通过构造一个理想的波束指向性包含主瓣、副瓣、旁瓣、角度位置等信息,由于真实信号的波束指向性,可以获取该角度方向,通过算出的角度位置和雷达件接收的布阵方式,可以构造该方向的理想信号,充分利用真实信号的完整的包络,通过相关系数计算,把波束指向性图的曲线的整体轮廓(包含主瓣、副瓣、旁瓣、角度位置等信息)所有信息都利用上,角度置信度的正确性更高。
19.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。