1.本发明涉及医用急救装置和方法技术领域,特别涉及一种基于心肺复苏模拟器的胸腔横截面积变化率检测方法。
背景技术:
2.心肺复苏简称cpr,是针对骤停的心脏和呼吸采取的救命技术,用于对出现急性心脏骤停的患者进行胸外心脏按压,目的是为了恢复患者自主行为。目前,大多数的心肺复苏主要以胸外按压为救助方式,通常包括机械和徒手。不论采取何种按压机制,最终目的都是为了在某一频率下改变人体胸腔的横截面积,以实现有效的血流灌注,防止患者脑死亡。
3.心肺复苏机通常也称作心肺复苏仪等,是一类以机械代替人力实施人工呼吸(机械通气)和胸外按压等基础生命支持操作的设备。此类设备可提供高水平无间断的人工循环和通气支持,并且某些便携可移动式的心肺复苏机可被用于院前急救中,即使在转运患者的过程中其工作也不会受到明显影响。
4.随着科学技术的发展在心肺复苏领域中,心肺复苏机产品不断迭代更新,产品种类繁多而心肺复苏效果参差不齐。另一方面对心肺复苏机产品的测试方法和测试设备也在不断更新发展。因此,如何对心肺复苏机产品进行性能测试和性能研究显得非常重要,其中为了提高患者存活机会,通过建立人体胸腔心肺复苏模拟器来测试和研究心肺复苏机是一种新的研发方向和发展趋势。然而通过人体胸腔心肺复苏模拟器来测试心肺复苏机改变人体胸腔横截面积的能力(比如胸腔横截面积变化率)十分重要。其实际意义不仅仅在于测试心肺复苏机,还可以让研究者进一步知晓胸腔横截面积的变化情况及数据,甚至可以用来制作关于心肺复苏方面的宣传动画。
5.当前,据发明人了解在心肺复苏领域中尚未见有关胸腔横截面积变化率检测方法内容的报道。因此,如何建立一种基于心肺复苏模拟器的胸腔横截面积变化率检测方法是本发明研究的课题。
技术实现要素:
6.本发明提供一种基于心肺复苏模拟器的胸腔横截面积变化率检测方法,其目的是要建立一种检测模拟人体胸腔横截面积变化率的方法,填补心肺复苏领域中的空白。
7.为达到上述目的,本发明采用的技术方案是:一种基于心肺复苏模拟器的胸腔横截面积变化率检测方法,其创新在于:在按压作用下,利用心肺复苏模拟器来检测模拟的人体胸腔轮廓上各个参考点的运动数据,利用测得的运动数据和数学模型来构建人体胸腔轮廓曲线方程,从而得到人体胸腔轮廓变化前和变化后的曲线,利用人体胸腔轮廓变化前和变化后的曲线计算模拟的人体胸腔横截面积变化率。
8.所述心肺复苏模拟器是一个用来模拟人体胸腔横截面变化的装置,该装置包括移动部、弹性部以及数据采集部,其中:所述移动部为用来承受外部按压力和/或挤压力后产生移动的结构,多个移动部
围绕模拟的人体胸腔横截面中心,并且沿模拟的人体胸腔轮廓布置。
9.所述弹性部为用来给移动部提供弹性力的结构,弹性部对应于每个移动部并作用于移动部,在初始状态下,各个移动部在弹性部的弹性力作用下均位于平衡位置上,此时各个移动部上的工作面形成模拟的人体胸腔轮廓,在按压作用下各个移动部沿着各自的移动路径靠近或者远离所述人体胸腔横截面中心,以此模拟人体胸腔横截面变化。
10.所述数据采集部为用来获取移动部的位置、运动和力学数据信息的模块,该模块至少包括测距传感器,当各个移动部在初始状态下或者按压作用下发生移动时,数据采集部能够获取移动部对应的位置数据信息。
11.所述胸腔横截面积变化率检测方法的具体内容如下:第一步,以心肺复苏模拟器的人体胸腔横截面中心为原点建立机械坐标系,其中,人体胸腔横截面的水平方向为x轴,竖直方向为y轴;设定人体胸腔轮廓变化前为初始状态,设定人体胸腔轮廓变化后为按压状态。
12.第二步,定义第一端点和第二端点,其中,第一端点是x轴一端与人体胸腔轮廓的相交点,第二端点是x轴另一端与人体胸腔轮廓的相交点;在初始状态下,第一端点和第二端点在所述机械坐标系中的位置值均能够从心肺复苏模拟器的数据采集部获取的位置数据信息得到,或者再经过几何换算得到。
13.除了第一端点和第二端点而外,沿人体胸腔轮廓一圈间隔设置若干个参考点;在初始状态下,每个参考点在所述机械坐标系中的位置值均能够从心肺复苏模拟器的数据采集部获取的位置数据信息得到,或者再经过几何换算得到。
14.第三步,在所有参考点中,将纵坐标大于零的参考点归为上部参考点,将纵坐标小于零的参考点归为下部参考点,对上部参考点和下部参考点分别构造曲线,即在上部参考点和第一端点及第二端点基础上构造上部曲线,在下部参考点和第一端点及第二端点基础上构造下部曲线,以此拟合初始状态下首尾相接的人体胸腔轮廓变化前闭合曲线。
15.所述上部曲线(17)和下部曲线(18)均使用下列算法之一进行构造:三次样条插值算法;线性插值算法;最近邻插值算法;据此能够拟合出初始状态下首尾相接的人体胸腔轮廓变化前闭合曲线。
16.第四步,在按压状态下,利用心肺复苏模拟器的数据采集部获取的位置数据信息,经过几何换算得到第一端点、第二端点以及各个参考点在所述机械坐标系中的位置值,然后参照所述第三步可以获得按压状态下人体胸腔轮廓变化后闭合曲线。
17.第五步,对人体胸腔轮廓变化前闭合曲线和人体胸腔轮廓变化后闭合曲线分别计算相对应的面积,得到变化前面积和变化后面积,然后计算胸腔横截面积变化率:e= (m1-m2)/m1式中:m1为人体胸腔轮廓变化前闭合曲线面积;m2为人体胸腔轮廓变化后闭合曲线面积;e为胸腔横截面积变化率;从而得到按压前和按压后的胸腔横截面积变化率。
18.上述技术方案中的有关内容解释如下:1. 上述方案中,所述按压作用可以使用心肺复苏机,或者使用人工按压或者其他按压装置。当使用心肺复苏机时在检测开始之前先利用绷带将心肺复苏机安装于心肺复苏
模拟器上,其中,心肺复苏机的按压头作用于心肺复苏模拟器的人体胸骨位置上,绷带的两端对应固定在心肺复苏机的机体上,绷带的中部围绕模拟的人体胸腔轮廓的侧部和背部。
19.2. 上述方案中,在所述第三步中,上部曲线和下部曲线均使用三次样条插值算法分别进行构造,在应用中采用分段插值方式,假设已知的第一端点、各个上部参考点、第二端点对应的坐标为:(x0,y0);(x1,y1);
………
;(xn,yn);即以第一端点及第二端点作为曲线的两个端点,将上部曲线按照参考点在x轴上分成n个区间,n个区间的x轴坐标为:(x0,x1);(x1,x2);
………
;(xn-1,xn);共有n 1个点,其中x0和xn为两个端点的x轴坐标。
20.三次样条就是将每个小区间的曲线定义成一个三次方程,在区间:xi,xi 1中对应的三次函数为:式一式一中:ai、bi、ci、di分别表示三次函数中的四个未知常数,i表示区间的点位代号, i取值范围为0-n;ai、bi、ci、di的求解公式如下:其中,hi表示区间的步长,步长公式为;而mi表示未知常数;在自然边界条件时,m0=0,mn=0;
ꢀꢀꢀꢀ
式二式二是以m为未知数的矩阵方程,其中:y0、y1、y2…yn
表示第一端点(13)、各上部参考点及第二端点的y轴坐标;通过式二可求解出m0、m1、m2…mn
,进而求出ai、bi、ci、di,进而求出每个小区间的表达式;由于上部曲线和下部曲线中的每个小区间的曲线方程均已确定,据此能够拟合出初始状态下首尾相接的人体胸腔轮廓变化前闭合曲线。
21.3. 上述方案中,在所述第五步中,计算胸腔横截面积变化率的方法是:在显示屏幕上将人体胸腔轮廓变化前闭合曲线和人体胸腔轮廓变化后闭合曲线以原点重合的方式同时显示在同一个图像坐标系中。
22.采用图像处理方法设置人体胸腔轮廓变化前闭合曲线和人体胸腔轮廓变化后闭
合曲线之间的所有像素点着色,颜色值为a。
23.采用阈值分割方法,从人体胸腔轮廓变化前闭合曲线和人体胸腔轮廓变化后闭合曲线构成的图像中提取颜色值为a的所有像素点。具体是:提取的颜色值阈值范围为a1-a2之间,其中,a1小于a,a2大于a。然后根据像素点的个数统计其图像坐标系中的变化面积s2。
24.采用相同的方法对人体胸腔轮廓变化前闭合曲线内的所有像素点着色,颜色值为b。
25.采用阈值分割方法,从人体胸腔轮廓变化前闭合曲线构成的图像中提取颜色值为b的所有像素点。具体是:提取的颜色值阈值范围为b1-b2之间,其中,b1小于b,b2大于b。然后根据像素点的个数统计其图像坐标系中的变化前面积s1。
26.计算图像坐标系中的面积变化率f:f= s2/s1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
式三式三中:f表示图像坐标系中的面积变化率;s1表示图像坐标系中的变化前面积;s2表示图像坐标系中的变化面积。
27.根据图像坐标系与机械坐标系的比列关系,将图像坐标系中的面积变化率换算成机械坐标系中的面积变化率,从而得到心肺复苏机按压前和按压后的胸腔横截面积变化率。
28.4. 上述方案中,在所述第五步中,计算胸腔横截面积变化率的方法是:对人体胸腔轮廓变化前闭合曲线和人体胸腔轮廓变化后闭合曲线分别进行定积分计算相对应的面积。
29.5. 上述方案中,在所述第二步中,沿人体胸腔轮廓一圈间隔设置若干个参考点,具体是:在人体胸腔轮廓上前胸和后背对应所述移动部上均至少设有两个参考点,其余移动部上均设有至少一个参考点,各个参考点之间以y轴为基准具有对称性。
30.6. 上述方案中,在所述第四步中,在按压状态下,假设第一端点和第二端点在所述机械坐标系中的位置值与初始状态相比不变,而每个参考点在所述机械坐标中的位置值均能够从心肺复苏模拟器的数据采集部获取的位置数据信息,经过几何换算得到。
31.本发明设计原理和效果是:为了建立一种检测模拟人体胸腔横截面积变化率的方法,填补心肺复苏领域中的空白,本发明在心肺复苏机的按压头作用下或者在人工按压作用下或者其他按压装置作用下,利用事先准备好的心肺复苏模拟器来检测模拟的人体胸腔轮廓上各个参考点的运动数据,然后利用测得的运动数据和数学模型来构建人体胸腔轮廓曲线方程,接着利用构建的人体胸腔轮廓曲线方程获得人体胸腔轮廓变化前和变化后的曲线,最后利用人体胸腔轮廓变化前和变化后的曲线计算模拟的人体胸腔横截面积变化率。本发明建立了一种全新的基于心肺复苏模拟器的人体胸腔横截面积变化率检测方法,该方法基于心肺复苏模拟器,测试科学合理,计算过程严紧,技术构思巧妙,是对心肺复苏机产品的测试方法和测试设备创新和突破。也可以应用于人工按压或者其他按压装置。其实际意义不仅仅在于可以测试心肺复苏机性能,还可以让研究者进一步知晓胸腔横截面积的变化情况及数据,甚至可以用来制作关于心肺复苏方面的宣传动画。为测试和研究心肺复苏机提供了一个新的和更加科技的平台。
附图说明
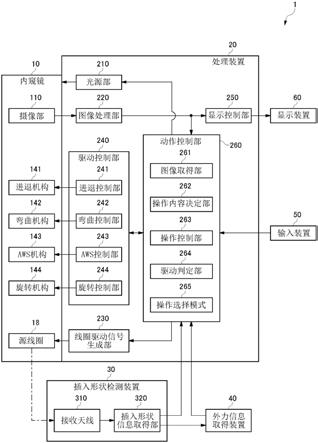
32.附图1为本发明实施例心肺复苏模拟器立体图;附图2为本发明实施例心肺复苏模拟器主视图;附图3为本发明实施例心肺复苏模拟器剖视图;附图4为本发明实施例心肺复苏模拟器安装心肺复苏机后的结构原理图;附图5为本发明实施例机械坐标系以及端点和参考点示意图;附图6为本发明实施例机械坐标系中的端点位置值检测原理图;附图7为本发明实施例机械坐标系中的参考点位置值检测原理图;附图8为本发明实施例由上部参考点和第一端点及第二端点构造的上部曲线示意图;附图9为本发明实施例由下部参考点和第一端点及第二端点构造的上部曲线示意图;附图10为本发明实施例将上部曲线分成8个区间的示意图;附图11为本发明实施例初始状态下人体胸腔轮廓变化前闭合曲线;附图12为本发明实施例按压状态下人体胸腔轮廓变化后闭合曲线;附图13为本发明实施例人体胸腔轮廓变化前闭合曲线与人体胸腔轮廓变化后闭合曲线原点重合图像示意图;附图14为本发明实施例人体胸腔轮廓变化前闭合曲线内的所有像素点着色示意图。
33.以上附图中:1.移动部;2.弹性部;3.导向支撑部;4.数据采集部;5.中心块;6.心肺复苏模拟器;7.心肺复苏机;8.绷带;9.按压头;10.导杆;11.导套;12.螺母;13.第一端点;14.第二端点;15.参考点;16.按压部;17.上部曲线;18.下部曲线;19.人体胸腔轮廓变化前闭合曲线;20.人体胸腔轮廓变化后闭合曲线。
具体实施方式
34.下面结合附图及实施例对本发明作进一步描述:实施例:一种基于心肺复苏模拟器的胸腔横截面积变化率检测方法该方法的总体技术方案和技术构思是:在心肺复苏机7的按压头9作用下,利用心肺复苏模拟器6来检测模拟的人体胸腔轮廓上各个参考点的运动数据,利用测得的运动数据和数学模型来构建人体胸腔轮廓曲线方程,将该人体胸腔轮廓变化前和变化后的曲线分别转换成图像,利用图像面积计算模拟的人体胸腔横截面积变化率。
35.如图1-3所示,所述心肺复苏模拟器6是一个在心肺复苏机7作用下用来模拟人体胸腔横截面变化的装置,该装置主要由移动部1、弹性部2、导向支撑部3、中心块5以及数据采集部3组成(见图1),其中:所述移动部1为用来承受外部按压力和/或挤压力后产生移动的结构(见图2和图3),多个移动部1围绕模拟的人体胸腔横截面中心,并且沿模拟的人体胸腔轮廓布置。在本实施例中,心肺复苏模拟器6一共有六个移动部1围绕模拟的人体胸腔横截面中心,并且沿人体胸腔轮廓布置(见图2)。移动部1的数量理论上没有限制,数量越多模拟越真实,理论上至少为三个移动部1。在本实施例中,移动部1为板片状结构件,但也不局限于此。其实质是
为了模拟人体胸腔周向局部的外轮廓。在装配状态下,移动部1朝外侧的表面表示人体胸腔周向的一段外轮廓。
36.所述弹性部2为用来给移动部1提供弹性力的结构(见图2和图3),弹性部2对应于每个移动部1并作用于移动部1,在安装心肺复苏机7后的初始状态下,各个移动部1在弹性部2的弹性力作用下均位于平衡位置上(见图4),此时各个移动部1上的工作面(朝外侧的表面)形成模拟的人体胸腔轮廓,在心肺复苏机7按压头9(见图4)的间歇按压作用下各个移动部1沿着各自的移动路径靠近或者远离所述人体胸腔横截面中心,以此模拟人体胸腔横截面变化。在本实施例中,弹性部2具体为弹簧,但本发明不局限于此,本质上只要是弹性体即可,弹簧、气囊、橡胶块、气缸等。在本实施例中,心肺复苏模拟器6一共有六个弹性部2(弹簧),每个弹性部2对应一个移动部1设置。但本发明不局限于此,可以是两个或三个弹簧作用于同一个移动部1。
37.所述导向支撑部3为用来控制移动部1移动路径的结构(见图2和图3)。在本实施例中,每个导向支撑部3均由导杆10、导套11和螺母12组成(见图3),其中,导套11为套结构,且滑动装配在导杆10上,移动部1相对导套11固定,以此保证移动部1能够沿导杆10滑动。在装配状态下,弹性部2作用在导杆10长度方向上。具体是弹簧套装在导杆10上,弹簧的一端相对定位,另一端作用在移动部1上,并迫使移动部1沿导杆10长度方向朝远离人体胸腔横截面中心移动,为了限制移动部1距离人体胸腔横截面中心的位置,在导杆10上安装有螺母12。在本实施例中导向支撑部3采用导杆10和导套11,但本发明不局限于此,可以直接利用弹性部2来限制移动部1的移动路径,比如取消导杆10和导套11,直接利用弹簧来替代,此时弹簧除了作为弹性结构而外,也有限制移动部1的移动路径的作用,区别只是移动路径有所不同。如果弹簧的弹性力足够只要一个弹簧作用于一个移动部1即可,如果一个弹簧的弹性力不够,可以采用两个或三个弹簧来作用于一个移动部1。这是本领域技术人员能够理解和知晓的。由此可见,在本发明中导向支撑部3可以认为是非必要结构,此功能可以通过弹性部2来体现。
38.所述中心块5为心肺复苏模拟器6的基体或座体(见图2和图3)。在本实施例中,中心块5是一个块状体结构,其处于人体胸腔横截面中心,所述各个导杆10均固定支承在该中心块5上(见图3)。但于对心肺复苏模拟器6来说,中心块5也是非必要的结构,比如取消中心块5,直接将各个弹性部2的一端(各个弹簧的一端)固定在一起即可实现。当然采用中心块5来固定连接各个弹性部2的一端从工艺角度更容易实现,这是本领域技术人员容易理解和知晓的。
39.所述数据采集部4为用来获取移动部1的位置、运动和力学数据信息的模块(见图1)。在本发明中该模块至少包括测距传感器,但本发明不局限于此,还可以包括运动和力学传感器。本发明胸腔横截面积变化率检测方法仅用到位置传感器(测距传感器)。当各个移动部1在初始状态下或者间歇按压作用下发生移动时,数据采集部4能够获取移动部1对应的位置数据信息。如果设置有运动和力学传感器可以用来测量移动部1运动速度、加速度和力学参数。这些都本领域技术人员利用现有技术可以实现的功能。
40.所述胸腔横截面积变化率检测方法的具体内容如下:第一步,如图4所示,利用绷带8将心肺复苏机7安装于心肺复苏模拟器6上,其中,心肺复苏机7的按压头9作用于心肺复苏模拟器6的人体胸骨位置上,即按压部16上(见图
1),绷带8的两端对应固定在心肺复苏机7的机体两侧(见图4),绷带8的中部围绕模拟的人体胸腔轮廓的侧部和背部(见图4)。
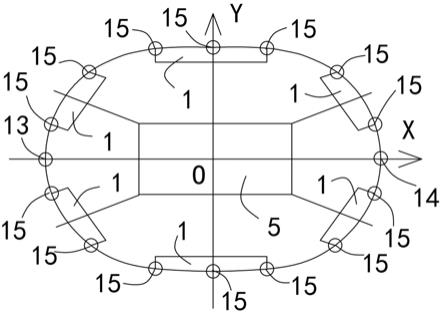
41.第二步,如图5所示,以心肺复苏模拟器6的人体胸腔横截面中心为原点o建立机械坐标系(见图5),其中,人体胸腔横截面的水平方向为x轴,竖直方向为y轴(见图5)。设定人体胸腔轮廓变化前为初始状态,设定人体胸腔轮廓变化后为按压状态,其中图5显示的初始状态。
42.第三步,如图5所示,定义第一端点13和第二端点14,其中,第一端点13是x轴一端与人体胸腔轮廓的相交点,第二端点14是x轴另一端与人体胸腔轮廓的相交点(见图5)。
43.如图6所示,在初始状态下,第一端点13和第二端点14在所述机械坐标系中的位置值均能够从心肺复苏模拟器6的数据采集部4获取的位置数据信息得到,或者再经过几何换算得到。在本实施例中,机械坐标系中的端点位置值检测原理参见图6所示。从图6中可以看出,为了获得第一端点13在机械坐标系中的位置值,针对第一端点13在x轴上设置一个数据采集部4(具体是测距传感器),可以直接检测到第一端点13相对测距传感器的距离,然后再加上该测距传感器至原点o的距离就是第一端点13在机械坐标系中相对原点o的距离,以此作为第一端点13在机械坐标系中的x轴坐标值。也可以将数据采集部4(具体是测距传感器)设置其他位置处,测得距离后利用直角三角形原理通过三角函数换算得到第一端点13在机械坐标系中的x轴坐标值。这是本领域技术人能够理解和接受的。
44.除了第一端点13和第二端点14而外,沿人体胸腔轮廓一圈间隔设置若干个参考点15。在本实施例中,设置了十四个参考点15(见图5)。其中,在人体胸骨的移动部1上设置三个参考点15,见图5的上部中间位置;在人体背部的移动部1上设置三个参考点15,见图5的下部中间位置;在人体胸腔左侧上部和下部的移动部1上各设置两个参考点15,见图5的左侧上部和下部;在人体胸腔右侧上部和下部的移动部1上各设置两个参考点15,见图5的右侧上部和下部,共计设置了十四个参考点15。设置参考点15的数量理论上不受限制,可多可少,但参考点15的数量越多模拟的准确性越高,带来的检测量和计算量也越大。另外,设置参考点15的数量和位置与心肺复苏模拟器6上的数据采集部4设置数量和位置有关,毕竟所有参考点15的运动距离是要能过数据采集部4(测距传感器)直接或间接测得,其中,间接测得是指测得的数据还要经过直角三角形的三角函数换算得到。在本实施中,为了简化检测和计算十四个参考点15之间在机械坐标系中具体对称性,即这十四个参考点15均以x轴为对称。但本发明不局限于此,所有参考点15设置可以不具有对称性,但一定要能够通过各个数据采集部4(测距传感器)直接或间接测得其在机械坐标系中的坐标值,即x轴坐标值和y轴坐标值。此外,在本实施例中,在人体胸骨和背部的移动部1上均设有三个参考点15,而在人体胸腔侧部的移动部1上均设有两个参考点15,其原因是在胸腔横截面积变化率检测过程中,在心肺复苏机7的按压头9作用下,人体胸骨和背部的轮廓形变大,参考点15的设置数量多更能准确反映真实情况,进一步提高模拟的准确性。但本发明不局限于此,可以作相应调整和变化,只要不影响模拟真实性和准确性均可以接受。
45.如图7所示,在初始状态下,每个参考点15在所述机械坐标系中的位置值均能够从心肺复苏模拟器6的数据采集部4获取的位置数据信息得到,或者再经过几何换算得到。在本实施例中,机械坐标系中的参考点15位置值检测原理参见图7所示。从图7中可以看出,为了获得参考点15在机械坐标系中的位置值,针对人体胸骨移动部1上的三个参考点,设置一
个数据采集部4(具体是测距传感器),参见图7所示可以直接检测到中间的一个参考点15相对测距传感器的距离,然后再加上该测距传感器至原点o的距离就是中间的一个参考点15在机械坐标系中相对原点o的距离,以此作为中间的一个参考点15在机械坐标系中的y轴坐标值。两侧的参考点15可以在中间的一个参考点15的基础上利用直角三角形的三角函数通过换算得到,从而分别获得两侧的参考点15在机械坐标系中的x轴坐标值和y轴坐标值。
46.同理,以此类推可以通过设置数据采集部4(测距传感器)获得人体胸腔侧部的各个移动部1上设置的两个参考点15,在机械坐标系中的x轴坐标值和y轴坐标值。
47.第四步,如图8-图11所示,在所有参考点15中,将纵坐标y大于零的参考点15归为上部参考点,将纵坐标y小于零的参考点15归为下部参考点,对上部参考点和下部参考点分别构造曲线,即在上部参考点和第一端点及第二端点基础上构造上部曲线17(见图8),在下部参考点和第一端点及第二端点基础上构造下部曲线18(见图9),以此拟合初始状态下首尾相接的人体胸腔轮廓变化前闭合曲线19(见图11)。
48.所述上部曲线17(见图8)和下部曲线18(见图9)均使用相同的三次样条插值算法分别进行构造。下面以上部曲线17(见图8)为例说明如何利用三次样条插值算法来构造上部曲线17。三次样条插值算法亦称三次插值法(cubic interpolation method)是一种多项式插值法,逐次以三次曲线φ(t)=a0 a1t a2t2 a3t3的极小点逼近寻求函数f(t)的极小点的一种方法,在百度百科可以查到,相关内容介绍,该算法本身属于现有技术。
49.在应用中采用分段插值方式,假设已知的第一端点13、各个上部参考点、第二端点14对应的坐标为(x0,y0),(x1,y1),
………
,(xn,yn),即以第一端点13及第二端点14作为曲线的两个端点,将上部曲线17按照参考点在x轴上分成n个区间,n个区间的x轴坐标为(x0,x1),(x1,x2),
………
,(xn-1,xn),共有n 1个点,其中x0,xn为两个端点的x轴坐标。在本实施例中,将上部曲线17分成8个区间,n为8,参见图10所示。从前面的第三步和第四步中可知,上部曲线17上的第一端点13、各个上部参考点和第二端点14在机械坐标系中的坐标值已知。由此可以按以下数学模型来推算上部曲线17的方程。
50.三次样条就是将每个小区间的曲线定义成一个三次方程,在区间(xi,xi 1)中对应的三次函数为:
ꢀꢀ
式一式一中:ai、bi、ci、di分别表示三次函数中的四个未知常数,i表示区间的点位代号, i取值范围为0-n;ai、bi、ci、di的求解公式如下:其中,hi表示区间的步长,步长公式为;而mi表示未知常数;
在自然边界条件时,m0=0,mn=0;
ꢀꢀꢀꢀ
式二式二是以m为未知数的矩阵方程,其中:y0、y1、y2…yn
表示第一端点(13)、各上部参考点及第二端点14的y轴坐标;通过式二可求解出m0、m1、m2…mn
,进而求出ai、bi、ci、di,进而求出每个小区间的表达式;由于上部曲线17和下部曲线18中的每个小区间的曲线方程均已确定,据此能够拟合出初始状态下首尾相接的人体胸腔轮廓变化前闭合曲线19(见图11)。
51.第五步,如图12所示,在按压状态下,利用心肺复苏模拟器6的数据采集部4获取的位置数据信息,经过几何换算得到第一端点13、第二端点14以及各个参考点15在所述机械坐标系中的位置值,然后参照所述第四步可以获得按压状态下人体胸腔轮廓变化后闭合曲线20(见图12)。
52.第六步,在显示屏幕上将人体胸腔轮廓变化前闭合曲线19和人体胸腔轮廓变化后闭合曲线20以原点重合的方式同时显示在同一个图像坐标系中(见图13)。
53.采用图像处理方法设置人体胸腔轮廓变化前闭合曲线19和人体胸腔轮廓变化后闭合曲线20之间的所有像素点着色,颜色值为a(见图13)。颜色值就是像素值,通常在0-255范围。
54.采用阈值分割方法,从人体胸腔轮廓变化前闭合曲线19和人体胸腔轮廓变化后闭合曲线20构成的图像中提取颜色值为a的所有像素点,需要说明的是,实践中在为了取到被着色为a的图形边界处的像素,让数据更为准确,也可以提取颜色值为a1-a2之间的所有像素点,其中a1值比a略小,a2值比a略大。例如,a的值为190,则a1的值为180,a2的值为200。然后根据像素点的个数统计其图像坐标系中的变化面积s2。由于图像坐标系中每个像素点的面积为已知,因此将统计到的像素点数量乘以每个像素点的面积就等于图像坐标系中的变化面积s2。
55.采用相同的方法对人体胸腔轮廓变化前闭合曲线19内的所有像素点着色,颜色值为b(见图14)。颜色值就是像素值,通常在0-255范围。
56.采用阈值分割方法,从人体胸腔轮廓变化前闭合曲线19构成的图像中提取颜色值为b的所有像素点,需要说明的是,实践中在为了取到被着色为b的图形边界处的像素,让数据更为准确,也可以提取颜色值为b1-b2之间的所有像素点,其中b1值比b略小,b2值比b略大。然后根据像素点的个数统计其图像坐标系中的变化前面积s1。由于图像坐标系中每个像素点的面积为已知,因此将统计到的像素点数量乘以每个像素点的面积就等于图像坐标系中的变化面积s1。图像坐标系中每个像素点的面积可以通过查询显示屏参数得到,也可以通过实验检测得到,还可以两将相结合来确定。
57.计算图像坐标系中的面积变化率f:f= s2/s1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
式三
式三中:f表示图像坐标系中的面积变化率;s1表示图像坐标系中的变化前面积;s2表示图像坐标系中的变化面积。
58.第七步,根据图像坐标系与机械坐标系的比列关系,将图像坐标系中的面积变化率换算成机械坐标系中的面积变化率,从而得到心肺复苏机7按压前和按压后的胸腔横截面积变化率。由于图像坐标系与中机械坐标系的比列关系为已知,因此可以容易得到机械坐标系中的胸腔横截面积变化率。图像坐标系与中机械坐标系的比列关系可以通过理论计算得到,也可以通过实验检测得到,还可以两将相结合来确定。
59.下面针对本发明的其他实施情况以及结构变化作如下说明:1.以上实施例中,在所述第三步中,沿人体胸腔轮廓一圈间隔设置若干个参考点15,具体是:在人体胸腔轮廓上前胸和后背对应所述移动部1上均设有三个参考点15,其余移动部上均设有两个参考点15,各个参考点15之间以y轴为基准具有对称性。但本发明不局限于此,参考点15的数量可以作调整,各个参考点15之间也可以不具有对称性。这是本领域技术人员容易理解并接受的。
60.2.以上实施例中,第五步,在初始状态下和按压状态下第一端点13和第二端点14在所述机械坐标系中的位置值均为实测。但本发明不局限于此,为了简化计算在按压状态下,可以假设第一端点13和第二端点14在所述机械坐标系中的位置值与初始状态相比不变,而每个参考点15在所述机械坐标中的位置值均能够从心肺复苏模拟器6的数据采集部4获取的位置数据信息,经过几何换算得到。这是本领域技术人员容易理解并接受的变化。
61.3.以上实施例中,第四步,初始状态下,上部曲线17和下部曲线18均使用三次样条插值算法进行构造。但本发明不局限于此,还可以使用下列算法之一进行构造:1)线性插值算法。线性插值算法亦称线性插值,是指插值函数为一次多项式的插值方式,其在插值节点上的插值误差为零。线性插值相比其他插值方式,如抛物线插值,具有简单、方便的特点。线性插值的几何意义即为概述图中利用过a点和b点的直线来近似表示原函数。线性插值可以用来近似代替原函数,也可以用来计算得到查表过程中表中没有的数值。线性插值在百度百科可以查到,相关内容介绍,该算法本身属于现有技术。
62.2)最近邻插值算法。最近邻插值算法亦称最近邻插值法nearest_neighbor是最简单的灰度值插值。也称作零阶插值,就是令变换后像素的灰度值等于距它最近的输入像素的灰度值。最近邻插值法在百度百科可以查到,相关内容介绍,该算法本身属于现有技术。
63.据此能够拟合出初始状态下首尾相接的人体胸腔轮廓变化前闭合曲线19。
64.实现步骤:1)matlab中,输入所采集到的参考点数据;2)统计参考点的横坐标,从小到大以此排列,并以0.1为间隔扩充数据并保存至新的数组中;3)用interp1函数,将参考点的横纵坐标和新的数组以及插值算法名称(’linest’,’nearest’等)四项参数作为输入,输出即为各扩充数据的纵坐标;4)用’plot’画图函数,即可得出拟合曲线。
65.使用上列算法来构造上部曲线17和下部曲线18与本发明实施例三次样条插值算法相比,主要区别在于构造的曲线方程有所不同,曲线的光滑度不同。但从实际效果来看,三次样条插值算法不论是精度和效果都较佳。
66.4.以上实施例中,第六步,是将人体胸腔轮廓变化前和变化后的曲线分别转换成图像,利用图像面积计算图像坐标系中的面积变化率。最后根据图像坐标系与机械坐标系的比列关系,将图像坐标系中的面积变化率换算成机械坐标系中的面积变化率,从而得到心肺复苏机7按压前和按压后的胸腔横截面积变化率。但本发明不局限于此,还可以对人体胸腔轮廓变化前闭合曲线19和人体胸腔轮廓变化后闭合曲线20分别进行定积分计算相对应的面积。具体计算闭合曲线面积的方法是:1)通过三次样条插值算法求得曲线公式,对变化前后公式分别进行定积分计算相对应闭合曲线面积;进一步的,变化前胸腔曲线的定义域为[x0,xn],变化后胸腔曲线的定义域为[x0,xn]。
[0067]
2)求出变化前面积为s1,变化后面积为s2,应用(s1-s2)/s1
×
100%即可求出。
[0068]
5.以上实施例中,按压作用使用的是心肺复苏机7(见图4)。但本发明不局限于此,还可使用人工按压或者其他按压装置。这是本领域技术人员容易理解并接受的。
[0069]
上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。