技术特征:
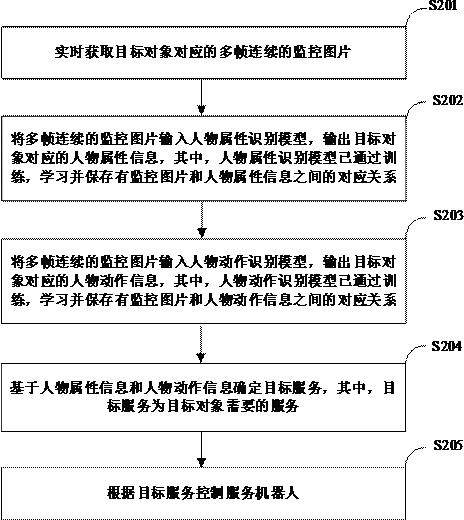
1.一种服务机器人的控制方法,其特征在于,包括:实时获取目标对象对应的多帧连续的监控图片;将多帧连续的监控图片输入人物属性识别模型,输出所述目标对象对应的人物属性信息,其中,所述人物属性识别模型已通过训练,学习并保存有所述监控图片和所述人物属性信息之间的对应关系;将多帧连续的监控图片输入人物动作识别模型,输出所述目标对象对应的人物动作信息,其中,所述人物动作识别模型已通过训练,学习并保存有所述监控图片和所述人物动作信息之间的对应关系;基于所述人物属性信息和所述人物动作信息确定目标服务,其中,所述目标服务为所述目标对象需要的服务;根据所述目标服务控制服务机器人。2.根据权利要求1所述的方法,其特征在于,所述基于所述人物属性信息和所述人物动作信息确定目标服务,包括:基于所述人物动作信息,判定所述目标对象是否有服务需求,其中,所述人物动作信息,包括:所述目标对象注视所述服务机器人,所述目标对象向所述服务机器人招手;基于所述人物属性信息,确定所述服务机器人与所述目标对象交互的人称用语;在所述目标对象有服务需求的情况下,基于所述人称用语,利用所述服务机器人与所述目标对象进行人机交互,以确定所述目标服务。3.根据权利要求1所述的方法,其特征在于,包括:实时获取所述目标对象对应的多帧连续的监控图片和语音指令;从多帧连续的监控图片中提取所述目标对象对应的唇语特征;将所述唇语特征输入唇语识别模型,输出所述目标对象对应的唇语指令,其中,所述人物属性识别模型已通过训练,学习并保存有所述唇语特征和所述唇语指令之间的对应关系;根据所述语音指令和所述唇语指令确定所述目标对象对应的真实指令;基于所述真实指令确定所述目标服务;根据所述目标服务控制所述服务机器人。4.根据权利要求3所述的方法,其特征在于,所述根据所述语音指令和所述唇语指令确定所述目标对象对应的真实指令之后,所述方法还包括:基于所述人物属性信息、所述人物动作信息和所述真实指令确定所述目标服务;根据所述目标服务控制服务机器人。5.根据权利要求3所述的方法,其特征在于,所述根据所述语音指令和所述唇语指令确定所述目标对象对应的真实指令之后,所述方法还包括:当所述真实指令表示所述目标对象需要路径导航服务时:获取所述目标对象所属区域的路径信息;根据所述真实指令、所述人物属性信息、所述人物动作信息和所述路径信息,通过所述服务机器人上的数学模型为所述目标对象规划路径;其中,所述目标服务包括所述路径导航服务。6.根据权利要求5所述的方法,其特征在于,所述根据所述真实指令、所述人物属性信
息、所述人物动作信息和所述路径信息,通过所述服务机器人上的数学模型为所述目标对象规划路径之前,所述方法还包括:分别根据路径最短规则、障碍物最少规则、耗时最短规则和行人最少规则,建立路径最短函数、障碍物最少函数、耗时最短函数和行人最少函数;基于所述路径最短函数、所述障碍物最少函数、所述耗时最短函数和所述行人最少函数,构建所述数学模型。7.根据权利要求1所述的方法,其特征在于,所述将多帧连续的监控图片输入人物动作识别模型,输出所述目标对象对应的人物动作信息之后,所述方法还包括:获取所述目标对象所属区域的天气信息;根据所述天气信息、所述人物属性信息和所述人物动作信息确定环境调节参数值;根据所述环境调节参数值,调用环境调节服务,以控制所述服务机器人调节所述目标对象所属区域的环境,所述目标服务包括所述环境调节服务。8.一种服务机器人的控制装置,其特征在于,包括:获取模块,被配置为实时获取目标对象对应的多帧连续的监控图片;第一模型模块,被配置为将多帧连续的监控图片输入人物属性识别模型,输出所述目标对象对应的人物属性信息,其中,所述人物属性识别模型已通过训练,学习并保存有所述监控图片和所述人物属性信息之间的对应关系;第二模型模块,被配置为将多帧连续的监控图片输入人物动作识别模型,输出所述目标对象对应的人物动作信息,其中,所述人物动作识别模型已通过训练,学习并保存有所述监控图片和所述人物动作信息之间的对应关系;确定模块,被配置为基于所述人物属性信息和所述人物动作信息确定目标服务,其中,所述目标服务为所述目标对象需要的服务;控制模块,被配置为根据所述目标服务控制服务机器人。9.一种电子设备,包括存储器、处理器以及存储在所述存储器中并且可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7中任一项所述方法的步骤。10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7中任一项所述方法的步骤。
技术总结
本公开涉及机器人控制技术领域,提供了服务机器人的控制方法及装置。该方法包括:实时获取目标对象对应的多帧连续的监控图片;将多帧连续的监控图片输入人物属性识别模型,输出目标对象对应的人物属性信息,其中,人物属性识别模型已通过训练,学习并保存有监控图片和人物属性信息之间的对应关系;将多帧连续的监控图片输入人物动作识别模型,输出目标对象对应的人物动作信息,其中,人物动作识别模型已通过训练,学习并保存有监控图片和人物动作信息之间的对应关系;基于人物属性信息和人物动作信息确定目标服务,其中,目标服务为目标对象需要的服务;根据目标服务控制服务机器人。根据目标服务控制服务机器人。根据目标服务控制服务机器人。
技术研发人员:徐斌 张献涛 曾祥永 支涛
受保护的技术使用者:北京云迹科技股份有限公司
技术研发日:2022.04.06
技术公布日:2022/5/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。