1.本实用新型涉及物料输送设备技术领域,具体涉及一种全自动装车机。
背景技术:
2.目前,袋装的物品经袋装打包机打装好后,需要将袋装的物品装车码放,在传统输送领域中,常用的物品装车多以人工、输送机、铲车和搂耙机为主。传统装车一般依靠人工或人工与半自动码垛机配合使用,效率低、劳动强度大、人工成本高、装车环境恶劣极易导致人身安全隐患。
技术实现要素:
3.针对以上现有技术的不足,本实用新型的目的在于提供一种全自动装车机,能够解决传统装车一般依靠人工或人工与半自动码垛机配合使用,效率低、劳动强度大、人工成本高、装车环境恶劣极易导致人身安全隐患的技术问题。
4.为了实现上述目的,本实用新型提供如下技术方案:
5.一种全自动装车机,包括主框架,所述主框架顶部的两条长边上均设置有导轨,所述导轨上依次设有移动机构和行走机构,所述移动机构上固定连接有输送带,所述输送带的输出端向下延伸至行走机构的下方,所述行走机构的底部连接有升降机构,所述升降机构底部连接有支撑框架,所述输送带的输出口端螺栓连接在支撑框架内,所述升降机构一侧连接有机械臂,所述机械臂上连接有抓手。
6.优选地,所述移动机构包括移动框架和用于驱动移动框架沿导轨前后运动的第一滚轮组,所述输送带位于移动框架的中间位置。
7.优选地,所述行走机构包括行走框架,所述行走框架内设置有电机和第二滚轮组,所述电机用于驱动第二滚轮组沿主框架上的导轨前后运动。
8.优选地,所述升降机构包括升降平台,所述升降平台内设置有油压泵站和油缸,所述油压泵站为油缸提供动力驱动升降平台向下伸出或向上收纳。
9.优选地,所述机械臂一端与升降平台连接,另一端连接有电机减速机,所述电机减速机与抓手相连。
10.优选地,所述抓手包括抓手框架,所述抓手框架顶部设有抓手连接板,所述抓手连接板与电机减速机连接,所述抓手框架的两侧底部均通过转杆连接有底板,所述底板与转杆固定连接;
11.所述抓手框架一侧为进料口,与进料口相对的一侧设置有气缸固定板,所述气缸固定板上设置有气缸,所述气缸固定板底部设置有一组气缸夹板,所述气缸夹板与气缸固定板固定连接,所述气缸的两侧对称设置有气缸连接件,所述气缸连接件与转杆连接。
12.与现有技术相比,本实用新型的有益效果为:本实用新型提出的一种全自动装车机可以提高效率、降低工人的劳动强度、节省人力物力、减少工人发生事故的可能、提升工厂经济效益、促进行业快速发展。
附图说明
13.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
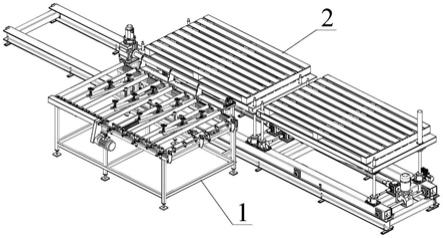
14.图1为本实用新型提出的一种全自动装车机的整体结构示意图;
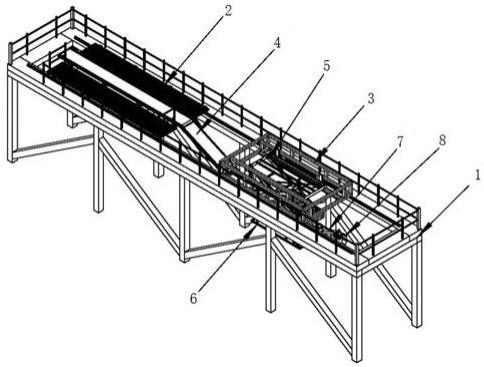
15.图2为本实用新型提出的一种全自动装车机的局部示意图;
16.图3为本实用新型提出的一种全自动装车机中移动机构结构示意图;
17.图4为本实用新型提出的一种全自动装车机中行走机构结构示意图;
18.图5为本实用新型提出的一种全自动装车机中升降机构结构示意图;
19.图6为本实用新型提出的一种全自动装车机中机械臂结构示意图;
20.图7为本实用新型提出的一种全自动装车机中抓手结构示意图。
21.附图标记说明:
22.1-主框架、2-移动机构、201-移动框架、202-第一滚轮组、3-行走机构、301-行走框架、302-电机、303-第二滚轮组、4-输送带、5-升降机构、501-升降平台、502-油压泵站、503-油缸、6-支撑框架、7-机械臂、8-抓手、801-抓手框架、802-抓手连接板、803-底板、804-气缸固定板、805-气缸、806-气缸夹板、807-气缸连接件、9-电机减速机。
具体实施方式
23.下面结合说明书附图,以举例的方式对本实用新型创造的内容作出详细描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
24.本技术方案提供了一种无需人力即可自动装车的机械设备,无需人工判断车厢大小,能满足不同车厢的装车。为实现上述目的,本技术方案采用了一种智能自动装车机视觉识别系统和激光扫描系统,包括工业相机、为工业相机提供照明的光源、与工业相机连接的计算机系统,计算机系统通过视觉系统传输的车辆信息,对信息进行识别、分析、确认信息后读取装车信息,启动激光扫描系统对车辆装车大小进行扫描形成车辆的长宽高信息,根据物料包装袋的尺寸,最终形成车辆码垛装车数据,然后计算机系统通过其输出接口连接装车机械臂逻辑控制器的信号输入端,装车机械臂逻辑控制器的信号输出端连接自动装车机械臂执行机构,控制机械臂进行装车操作。
25.在本实施例中,如图1-7所示,一种全自动装车机,包括主框架1,所述主框架1顶部的两条长边上均设置有导轨,所述导轨上依次设有移动机构2和行走机构3,所述移动机构2上固定连接有输送带4,所述输送带4的输出端向下延伸至行走机构3的下方,所述行走机构3的底部连接有升降机构5,所述升降机构5底部连接有支撑框架6,所述输送带4的输出口端螺栓连接在支撑框架6内,所述升降机构5一侧连接有机械臂7,所述机械臂7上连接有抓手8。
26.进一步地,在上述技术方案中,所述移动机构2、行走机构3、输送带4、升降机构5、支撑框架6、机械臂7和抓手8均集成在主框架1上,包装后的物料经输送带4传输,物料从输送带4的输出端进入抓手8,通过机械臂7带动抓手8将物料装车码垛,在此过程中,行走机构3能够带动移动机构2沿导轨同时进行前进和后退运动,升降机构5能够调整机械臂7的高度位置,利于一层一层的码垛,当车体前端码垛完成后需要对车体后端进行码垛,需要通过将
移动机构2和行走机构3同时后移,进而保证机械臂7能够将物料通过抓手码到车体后端。
27.所述移动机构2包括移动框架201和用于驱动移动框架201沿导轨前后运动的第一滚轮组202,所述输送带4位于移动框架201的中间位置。
28.进一步地,在上述技术方案中,移动机构2用于带动输送带4前后移动,当对车体前端进行装车码垛时,移动框架201沿输送方向向前移动;当对车体后端进行装车码垛时,移动框架201沿输送方向的反方向移动,实现距离差调整。
29.所述行走机构3包括行走框架301,所述行走框架301内设置有电机302和第二滚轮组303,所述电机302用于驱动第二滚轮组303沿主框架1上的导轨前后运动。
30.进一步地,在上述技术方案中,电机302驱动第二滚轮组303沿导轨运动,从而使得行走机构3运动,行走机构3通过输送带4与移动机构2连接,进而带动移动机构2同时进行移动,这样移动机构2移动时就无需单独设置驱动装置,利于节约成本。
31.所述升降机构5包括升降平台501,所述升降平台501内设置有油压泵站502和油缸503,所述油压泵站502为油缸503提供动力驱动升降平台501向下伸出或向上收纳。
32.进一步地,在上述技术方案中,所述升降机构5用于调整机械臂7的高度位置,进而实现码垛层高的变换。
33.所述机械臂7一端与升降平台501连接,另一端连接有电机减速机9,所述电机减速机9与抓手8相连。
34.进一步地,在上述技术方案中,通过升降机构5直接调节机械臂7的高度位置,进而实现对抓手8高度的调节。
35.所述抓手8包括抓手框架801,所述抓手框架801顶部设有抓手连接板802,所述抓手连接板802与电机减速机9连接,所述抓手框架801的两侧底部均通过转杆连接有底板803,所述底板803与转杆固定连接;
36.所述抓手框架801一侧为进料口,与进料口相对的一侧设置有气缸固定板804,所述气缸固定板804上设置有气缸805,所述气缸固定板804底部设置有一组气缸夹板806,所述气缸夹板806与气缸固定板804固定连接,所述气缸805的两侧对称设置有气缸连接件807,所述气缸连接件807与转杆连接。
37.进一步地,在上述技术方案中,首先气缸805收缩,气缸805脱离起固定导向作用的气缸夹板806,气缸连接件807带动转杆转动,两块底板803相贴合,实现底部封闭,物料从输送带4的输出端出来后从进料口进入抓手8内,通过机械臂7带动抓手8将物料移动至车体位置,气缸805伸出,通过气缸连接件807带动转杆反向转动,两块底板803打开,物料落至车体上。
38.工作原理:首先根据码垛位置的不同调整机械臂7的位置,行走机构3通过电机302和第二滚轮组303驱动,进行位置的调整,机械臂7连接在升降机构5上,升降机构5位于行走机构3的下方且与行走机构3固定连接,从而实现机械臂7位置的调整;行走机构3通过输送带4与移动机构2连接,进而带动移动机构2同步运动,调整好后,物料经输送带4传送,当物料达到输送带4的输出端后在输送带4的传动下自动进入抓手8内,机械臂7驱动抓手8将物料装车码垛。当需要调整码垛层高时,升降机构5带动机械臂7做位置调整。
39.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用
新型的技术方案及其申请构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。