1.本实用新型涉及环盘类零件加工技术领域,特别涉及一种用于环盘类零件加工的机器人夹具。
背景技术:
2.环盘类零件是一类特点明显且用途广泛的零件,法兰和管桩端板是两种典型的环盘类零件,在进行机器人焊接、搬运及检测作业时,通常采用机械式压合装置来实现对其径向或表面施压,以达到夹紧的目的。
3.现有技术中通过卡件上的弧形孔对环盘类零件进行夹紧固定,但是卡件通过螺栓进行安装固定,针对不同尺寸的环盘类零件不方便对其进行更换,不能够满足实际使用需要。
4.因此,需要设计一种能够方便对卡件进行更换,便于对不同尺寸的环盘类零件进行压紧的用于环盘类零件加工的机器人夹具。
技术实现要素:
5.本实用新型的目的是提供一种用于环盘类零件加工的机器人夹具,具有能够方便对卡件进行更换,便于对不同尺寸的环盘类零件进行压紧的效果。
6.本实用新型的上述技术目的是通过以下技术方案得以实现的:包括加工台和两个卡件,所述加工台的两侧面固定设置有支撑架,所述支撑架的侧面固定设置有电机,所述电机的轴端设置有安装块,所述卡件的侧面开设有两个方导槽,所述安装块的侧面固定设置有与方导槽相卡装的方导块,所述卡件和安装块的侧面分别开设有方槽一和方槽二,所述安装块的侧面设置有承载台,所述承载台上开设有滑孔,所述滑孔内滑动接触有卡接块,所述方槽一的内壁上开设有卡接槽,所述卡接块与卡接槽相卡装,所述卡接块的顶部设置有挡板,所述卡接块的侧面固定设置有梯形件,所述梯形件与方槽二的内壁之间焊接有弹簧,所述支撑架上固定设置有导杆,所述导杆的端部固定设置有配合三角件。
7.本实用新型的进一步设置为:所述方槽二的侧壁上开设有平孔,平孔位于配合三角件的一侧。
8.本实用新型的进一步设置为:所述挡板的底部与承载台相接触。
9.通过采用上述技术方案,能够对挡板进行限位。
10.本实用新型的进一步设置为:所述安装块的侧面与卡件相贴合。
11.本实用新型的进一步设置为:所述加工台上设置有三个抽屉。
12.通过采用上述技术方案,方便对其余的卡件进行存放。
13.本实用新型的进一步设置为:所述梯形件与配合三角件配合使用。
14.本实用新型的进一步设置为:所述承载台位于方槽一内。
15.本实用新型的进一步设置为:所述卡件位于加工台的上方。
16.本实用新型的有益效果是:
17.1、本实用新型通过设置的电机、安装块、卡件和方导块,只需要启动两个电机,可以通过两个卡件上的弧形孔对环盘类零件进行压紧固定;
18.2、本实用新型通过设置的卡件、承载台、卡接块、挡板、梯形件、弹簧、平孔、导杆和配合三角件,只需要启动电机,可以使得卡件和安装块进行移动,配合三角件挤压梯形件使得梯形件上移,直至卡接块移出卡接槽,此时方便将卡件取出,便于更换具有不同尺寸弧形孔的卡件,能够对不同尺寸的环盘类零件进行压紧固定。
附图说明
19.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
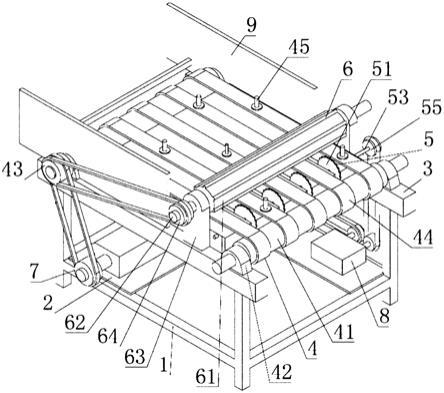
20.图1是本实用新型提出的一种用于环盘类零件加工的机器人夹具的结构示意图。
21.图2是本实用新型提出的一种用于环盘类零件加工的机器人夹具的剖视结构示意图。
22.图3是图2中的a部分结构示意图。
23.图4是图3中的b部分结构示意图。
24.图中,1、加工台;2、支撑架;3、电机;4、安装块;5、卡件;6、方导块;7、方槽一;8、承载台;9、卡接块;10、挡板;11、梯形件;12、方槽二;13、弹簧;14、平孔;15、导杆;16、配合三角件。
具体实施方式
25.下面将结合具体实施例对本实用新型的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
26.实施例一
27.参见图1、图2、图3和图4,本实用新型提供一种用于环盘类零件加工的机器人夹具,包括加工台1和两个卡件5,加工台1的两侧面固定设置有支撑架2,支撑架2的侧面固定设置有电机3,电机3的轴端设置有安装块4,安装块4的侧面与卡件5相贴合,卡件5的侧面开设有两个方导槽,安装块4的侧面固定设置有与方导槽相卡装的方导块6,卡件5和安装块4的侧面分别开设有方槽一7和方槽二12,安装块4的侧面设置有承载台8,承载台8上开设有滑孔,滑孔内滑动接触有卡接块9,方槽一7的内壁上开设有卡接槽,卡接块9与卡接槽相卡装,卡接块9的顶部设置有挡板10,挡板10的底部与承载台8相接触,能够对卡接块9进行限位,卡接块9的侧面固定设置有梯形件11,梯形件11与方槽二12的内壁之间焊接有弹簧13,支撑架2上固定设置有导杆15,导杆15的端部固定设置有配合三角件16。
28.根据图2、图3和图4所示,方槽二12的侧壁上开设有平孔14,平孔14位于配合三角件16的一侧,方便配合三角件16穿过平孔14,梯形件11与配合三角件16配合使用,承载台8位于方槽一7内。
29.根据图1所示,加工台1上设置有三个抽屉,便于对卡件5进行存放,卡件5位于加工台1的上方,方便在加工台1上对环盘类零件进行压紧。
30.实施例二
31.参见图1、图2、图3和图4,本实用新型提供一种用于环盘类零件加工的机器人夹具,包括加工台1和两个卡件5,加工台1的两侧面通过螺栓固定设置有支撑架2,支撑架2的侧面固定设置有电机3,电机3的轴端设置有安装块4,安装块4的侧面与卡件5相贴合,卡件5的侧面开设有两个方导槽,安装块4的侧面固定设置有与方导槽相卡装的方导块6,卡件5和安装块4的侧面分别开设有方槽一7和方槽二12,安装块4的侧面设置有承载台8,承载台8上开设有滑孔,滑孔内滑动接触有卡接块9,方槽一7的内壁上开设有卡接槽,卡接块9与卡接槽相卡装,卡接块9的顶部设置有挡板10,挡板10的底部与承载台8相接触,能够对卡接块9进行限位,卡接块9的侧面固定设置有梯形件11,梯形件11与方槽二12的内壁之间焊接有弹簧13,支撑架2上固定设置有导杆15,导杆15的端部通过螺栓固定设置有配合三角件16。
32.根据图2、图3和图4所示,方槽二12的侧壁上开设有平孔14,平孔14位于配合三角件16的一侧,方便配合三角件16穿过平孔14,梯形件11与配合三角件16配合使用,承载台8位于方槽一7内。
33.根据图1所示,加工台1上设置有三个抽屉,便于对卡件5进行存放,卡件5位于加工台1的上方,方便在加工台1上对环盘类零件进行压紧。
34.工作原理:启动电机3,使得两个卡件5相向移动,两个卡件5上的弧形孔对环盘类零件进行压紧固定,在需要对卡件5进行更换时,启动电机3,两个安装块4向相互远离的方向进行移动,配合三角件16穿过平孔14并与梯形件11斜面贴合,然后配合三角件16会挤压梯形件11,使得梯形件11、卡接块9和挡板10向上移动,梯形件11挤压弹簧13,直至卡接块9移出卡接槽,将卡件5取下,对卡件5进行更换,每组卡件5上弧形孔尺寸不一样,便于对不同尺寸的环盘类零件进行压紧。
35.以上对本实用新型所提供的一种用于环盘类零件加工的机器人夹具进行了详细介绍。本文中应用了具体实施例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以对本实用新型进行若干改进和修饰,这些改进和修饰也落入本实用新型权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。