1.本发明属于钢球尺寸测量技术领域,具体涉及一种钢球直径高精度测量与分组系统。
背景技术:
2.一套轴承有多个钢球,钢球的直径尺寸差异会使轴承在运转时只有少数几个钢球承受摩擦作用。这样不仅会影响轴承的游隙和旋转精度,而且会增加轴承的摩擦力矩、振动和噪声,加快轴承的磨损和温升。而且钢球直径尺寸差异过大会造成只有个别的钢球受力,使轴承承载能力大大降低,滚动接触面应力增大,从而降低了轴承的使用寿命。当前精密传动机构对钢球直径的一致性较高,例如在高铁、风电等领域对钢球直径一致性要求更高,对于钢球直径分组在国内还没具体的应用,目前国内钢球的直径测量工作主要通过人工抽检、专用设备分选等来完成,人工分选效率低、劳动强度大而且准确率较低;国内的钢球分选设备,大多采用机械对辊的方式进行筛选,这种分选方式由于加工和装配精度的原因,实现不了高精度的筛选,目前能实现的最高分选精度为2μm,不能实现快速高精度分选。实现高精度在线检测的设备,目前国内还没有,尤其是在生产线上的钢球在线高精度检测还存在较大的空白。
3.目前国内对于高等级钢球仍需从国外进口,g5级钢球国内有些企业可以生产,但是g3级钢球国内生产工艺达不到要求,在一定的时期内,由于加工技术和加工方式的限制,我们加工出的产品的质量是一定的。所以,为了进一步提高钢球精度,钢球直径的分组工作是很有必要的。要保证钢球的高精度,并且适用于某些高速旋转的场合,在不增加钢球加工难度的条件下,可以在g10级钢球中挑出来g3级钢球。根据钢球的公差等级与粗糙度范围值国际标准,不同等级的钢球的球变动量在一定范围内,要在允许的球变动量内将钢球直径分为更精细的小组。
技术实现要素:
4.本发明的目的在于提出一种钢球直径高精度测量与分组系统,解决现有技术存在的测量范围小、机器容易损坏、造价高以及普适性差的问题。
5.为实现上述目的,本发明的钢球直径高精度测量与分组系统包括:钢球上料系统、测量系统、下料及分组系统以及控制系统;
6.所述控制系统控制所述钢球上料系统步进向测量系统进行单个球的上料,所述测量系统测量当前钢球与基准球的直径变化量并反馈至控制系统,控制系统根据当前钢球与基准球的直径变化量控制下料及分组系统的不同分组盘承接下料钢球;
7.所述测量系统至少包括:
8.钢球储料定位单元,所述钢球储料定位单元对待测量的钢球的下端以及两侧进行定位;
9.顶部定位单元,所述顶部定位单元至少包括钢板和一端与所述钢板凸出部位固定
连接的弹性板,所述弹性板和所述钢板之间平行设置并留有缝隙,所述弹性板与所述钢板相背的一面和所述待测量钢球接触并形变;
10.以及图像采集单元,通过所述图像采集单元采集弹性板和钢板之间缝隙的尺寸并传输至控制系统,所述控制系统根据当前钢球下测量的缝隙尺寸以及基准球下测量的缝隙尺寸获得当前钢球和基准球的尺寸变换量。
11.所述钢球上料系统包括:
12.上料台:
13.设置在所述上料台上的上料支架;
14.倾斜设置在所述上料支架上的储放盘,所述储放盘上表面均匀分布多个v型槽,v型槽方向沿倾斜方向设置;
15.设置在所述储放盘倾斜方向末端的提升机构;
16.设置在所述提升机构另一侧的输送机构,通过所述提升机构将所述储放盘的钢球提升传递至输送机构;
17.以及设置在所述输送机构输送方向末端并和所述输送机构轴线垂直的推杆机构,所述推杆机构步进推动输送至输送机构末端的钢球经上料斜板进入到测量系统。
18.所述提升机构包括:
19.和所述上料支架沿竖直方向滑动配合的提升板,所述提升板一侧和所述储放盘的倾斜末端侧壁接触,所述提升板上端面设置v型槽,所述提升板上端面的v型槽和所述储放盘上端面上的v型槽一一相对并搭接;
20.以及推动所述提升板上下运动的提升电动推杆,所述提升电动推杆一端和所述上料台连接,另一端和所述提升板下端面连接,所述提升电动推杆和所述控制系统电连接。
21.所述输送机构包括:
22.支撑在所述上料支架上输送架;
23.设置在输送架上的输送带;
24.均匀设置在所述输送带上的多个隔板;
25.以及对称设置在输送带两侧的侧板,多个所述隔板、侧板以及输送带形成了多个上端开口的容纳槽,所述侧板靠近输送带输送方向的一端距离输送带输送方向末端至少留有两个隔板之间的距离,作为钢球出料腔。
26.所述推杆机构包括:
27.支撑在所述上料台上的步进推杆;
28.设置在所述步进推杆作用端端部的弹性附件;
29.以及步进电机,通过所述步进电机带动所述步进推杆步进推动位于出料腔内的钢球进入到上料斜板。
30.所述测量系统还包括:
31.箱体,所述箱体背部设置有进料孔,上料斜板穿过所述进料孔和所述钢球储料定位单元进料端搭接;
32.以及位于所述箱体内部的工作台,所述钢球储料定位单元、顶部定位单元以及图像采集单元均位于所述工作台上。
33.所述钢球储料定位单元包括:
34.设置在所述工作台上的载物台,所述载物台上设置有出料孔;所述顶部定位单元以及图像采集单元位于所述载物台的两侧;
35.设置在所述载物台上的v型定位结构,所述v型定位结构包括两个对称设置的定位块,所述定位块相对的两侧为斜面;
36.以及设置在所述载物台上端面并位于两个所述定位块之间的球基面定位块。
37.所述顶部定位单元还包括:
38.固定在所述工作台上的支撑杆;
39.和所述支撑杆滑动配合并通过调整螺栓固定或脱离的固定轴套;
40.设置在所述固定轴套上方并和所述支撑杆滑动配合的升降机构,所述钢板一端固定在所述升降机构的侧壁;
41.以及设置在所述载物台上的固定架,所述钢板另一端通过位于上端的顶丝以及位于两侧的顶丝定位在所述固定架上。
42.所述图像采集单元包括:
43.设置在所述工作台上的升降台;
44.设置在所述升降台上端的镜头移动机构;
45.以及设置所述镜头移动机构上的工业相机,所述工业相机和所述钢板以及弹性板之间的狭缝相对设置。
46.所述下料及分组系统包括:
47.下料斜坡,所述下料斜坡一端位于测量系统的载物台上的出料孔下方;
48.分组车,所述分组车下单设置有行走轮;
49.设置在所述分组车上并相对所述分组车滑动配合的支撑架,所述支撑架和所述分组车滑动配合方向沿水平面并垂直下料斜坡方向;
50.对称设置在所述支撑架上端面两侧并垂直支撑架的滑轨;
51.和所述滑轨滑动配合的托盘;
52.由上至下依次设置在所述托盘上的多个分组盘,所述分组盘上设置有v型槽,所述分组盘一端作为进料端,另一端端部设置有挡板;
53.以及分组通道,所述分组通道一端和下料斜坡搭接,另一端和多个分组盘中的任意一个中的任意一个v型槽搭接。
54.本发明的有益效果为:本发明通过钢球上料系统实现自动逐一上料,用工业相机拍摄弹性板与钢板间的狭缝图像,再对狭缝图像进行图像处理,将同一批次的第一个钢球标定为基准钢球,以此钢球作为本批次钢球的测量基准,将后续的待测钢球分别与基准钢球比较,根据差值大小进行钢球分组,本产品采用相对显微测量方法,机器视觉和图像智能处理算法相结合的方式实现钢球直径的高精度测量与分组。钢板与弹性板表面抛光处理,精度高,表面光洁度高,便于图像处理。
55.采用了计算机图像处理的方法,实现钢球直径的高精度测量及分组,极大提高生产过程中的产品分组准确率,减少了生产耗材;使用的钢球自动上料、分组、下料系统,提高了生产自动化程度,降低人工成本,相同工作量,占用人员减少80%以上,对于生产规模为两条生产线及以上的企业,每年可为企业减少人工成本42万元以上;通过高精度直径测量及分组系统的应用,在分组过程中将同批次钢球分为直径尺寸相近的组,提高轴承安全性,
规避企业被索赔风险,减少轴承质量问题带来重大质量事故;钢球高精度直径测量及分组系统实现了技术上的创新突破,极大地提升了钢球生产、分选自动化程度,助力钢球行业生产从劳动密集型向智能制造转型升级。满足了当前钢球行业的市场需求、现实需求以及时代需求。
附图说明
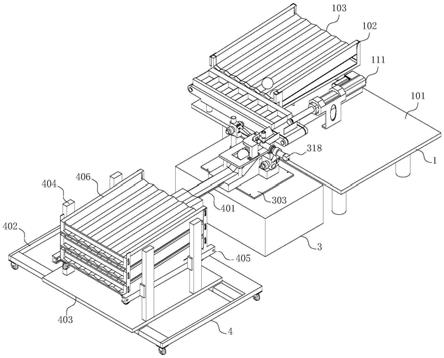
56.图1为本发明的钢球直径高精度测量与分组系统一个角度整体结构示意图;
57.图2为本发明的钢球直径高精度测量与分组系统另一个角度整体结构示意图;
58.图3为本发明的钢球直径高精度测量与分组系统隐藏测量系统的箱体时结构示意图;
59.图4为本发明的钢球直径高精度测量与分组系统隐藏测量系统的箱体时结构俯视图;
60.图5为本发明的钢球直径高精度测量与分组系统隐藏测量系统的箱体时结构主视图;
61.图6为本发明的钢球直径高精度测量与分组系统中钢球上料系统结构示意图;
62.图7为本发明的钢球直径高精度测量与分组系统中钢球上料系统隐藏输送机构时结构示意图;
63.图8为本发明的钢球直径高精度测量与分组系统中测量系统前视角结构示意图;
64.图9为本发明的钢球直径高精度测量与分组系统中测量系统后视角结构示意图;
65.图10为本发明的钢球直径高精度测量与分组系统中测量系统隐藏箱体时结构示意图;
66.图11为本发明的钢球直径高精度测量与分组系统中测量系统局部示意图;
67.图12为本发明的钢球直径高精度测量与分组系统中顶部定位单元结构示意图;
68.图13为本发明的钢球直径高精度测量与分组系统中下料及分组系统结构示意图;
69.图14为本发明的钢球直径高精度测量与分组系统中下料及分组系统结构主视图;
70.图15为本发明的钢球直径高精度测量与分组系统中采集的狭缝图像示意图;
71.图16为本发明的钢球直径高精度测量与分组系统中采集的狭缝图像选取测量段示意图;
72.图17为本发明的钢球直径高精度测量与分组系统中二值化图像示意图;
73.图18为针对本发明的钢球直径高精度测量与分组系统搭建的力学模型示意图;
74.其中:1、钢球上料系统,101、上料台,102、上料支架,103、储放盘,104、提升板,105、提升电动推杆,106、输送架,107、输送带,108、隔板,109、侧板,110、步进电机,111、步进推杆,112、弹性附件,2、上料斜板,3、测量系统,301、箱体,302、进料孔,303、工作台,304、载物台,305、出料孔,306、v型定位结构,307、球基面定位块,308、固定架,309、支撑杆,310、固定轴套,311、调整螺栓,312、升降机构,313、钢板,314、弹性板,315、顶丝,316、升降台,317、镜头移动机构,318、工业相机,4、下料及分组系统,401、下料斜坡,402、分组车,403、支撑架,404、滑轨,405、托盘,406、分组盘,407、挡板,408、分组通道。
具体实施方式
75.下面结合附图对本发明的实施方式作进一步说明。
76.参见附图1-附图14,本发明的钢球直径高精度测量与分组系统包括:钢球上料系统1、测量系统3、下料及分组系统4以及控制系统;
77.所述控制系统控制所述钢球上料系统1步进向测量系统3进行单个球的上料,所述测量系统3测量当前钢球与基准球的直径变化量并反馈至控制系统,控制系统根据当前钢球与基准球的直径变化量控制下料及分组系统4的不同分组盘406承接下料钢球;
78.所述测量系统3至少包括:
79.钢球储料定位单元,所述钢球储料定位单元对待测量的钢球的下端以及两侧进行定位;
80.顶部定位单元,所述顶部定位单元至少包括钢板313和一端与所述钢板313凸出部位固定连接的弹性板314,所述弹性板314和所述钢板313之间平行设置并留有缝隙,所述弹性板314与所述钢板313相背的一面和所述待测量钢球接触并形变;
81.以及图像采集单元,通过所述图像采集单元采集弹性板314和钢板313之间缝隙的尺寸并传输至控制系统,所述控制系统根据当前钢球下测量的缝隙尺寸以及基准球下测量的缝隙尺寸获得当前钢球和基准球的尺寸变换量。
82.所述钢球上料系统1包括:
83.上料台101:
84.设置在所述上料台101上的上料支架102;
85.倾斜设置在所述上料支架102上的储放盘103,所述储放盘103上表面均匀分布多个v型槽,v型槽方向沿倾斜方向设置;
86.设置在所述储放盘103倾斜方向末端的提升机构;
87.设置在所述提升机构另一侧的输送机构,通过所述提升机构将所述储放盘103的钢球提升传递至输送机构;
88.以及设置在所述输送机构输送方向末端并和所述输送机构轴线垂直的推杆机构,所述推杆机构步进推动输送至输送机构末端的钢球经上料斜板2进入到测量系统3。
89.所述提升机构包括:
90.和所述上料支架102沿竖直方向滑动配合的提升板104,所述提升板104一侧和所述储放盘103的倾斜末端侧壁接触,所述提升板104上端面设置v型槽,所述提升板104上端面的v型槽和所述储放盘103上端面上的v型槽一一相对并搭接;
91.以及推动所述提升板104上下运动的提升电动推杆105,所述提升电动推杆105一端和所述上料台101连接,另一端和所述提升板104下端面连接,所述提升电动推杆105和所述控制系统电连接。
92.所述输送机构包括:
93.支撑在所述上料支架102上输送架106;
94.设置在输送架106上的输送带107;
95.均匀设置在所述输送带107上的多个隔板108;
96.以及对称设置在输送带107两侧的侧板109,多个所述隔板108、侧板109以及输送带107形成了多个上端开口的容纳槽,所述侧板109靠近输送带107输送方向的一端距离输
送带107输送方向末端至少留有两个隔板108之间的距离,作为钢球出料腔。
97.所述推杆机构包括:
98.支撑在所述上料台101上的步进推杆111;
99.设置在所述步进推杆111作用端端部的弹性附件112,所述弹性附件112可以是弹性橡胶垫;
100.以及步进电机110,通过所述步进电机110带动所述步进推杆111步进推动位于出料腔内的钢球进入到上料斜板2。
101.本实施例中步进电机110与步进推杆111采用丝杠螺母副的传动形式,步进推杆111包括作用杆以及和作用杆滑动配合的导套,导套设置在上料台101上,作用杆设置有外螺纹,作用杆和螺母形成丝杠螺母副,螺母和导套转动配合,步进电机110通过齿轮传动或带传动带动螺母转动,正转或反转带动作用杆伸出或缩回。
102.所述测量系统3还包括:
103.箱体301,所述箱体301背部设置有进料孔302,上料斜板2穿过所述进料孔302和所述钢球储料定位单元进料端搭接;
104.以及位于所述箱体301内部的工作台303,所述钢球储料定位单元、顶部定位单元以及图像采集单元均位于所述工作台303上。
105.所述钢球储料定位单元包括:
106.设置在所述工作台303上的载物台304,所述载物台304上设置有出料孔305;所述顶部定位单元以及图像采集单元位于所述载物台304的两侧;
107.设置在所述载物台304上的v型定位结构306,所述v型定位结构306包括两个对称设置的定位块,所述定位块相对的两侧为斜面;
108.以及设置在所述载物台304上端面并位于两个所述定位块之间的球基面定位块307。
109.所述顶部定位单元还包括:
110.固定在所述工作台303上的支撑杆309;
111.和所述支撑杆309滑动配合并通过调整螺栓311固定或脱离的固定轴套310;
112.设置在所述固定轴套310上方并和所述支撑杆309滑动配合的升降机构312,所述钢板313一端固定在所述升降机构312的侧壁;
113.以及设置在所述载物台304上的固定架308,所述钢板313另一端通过位于上端的顶丝315以及位于两侧的顶丝315定位在所述固定架308上。
114.所述图像采集单元包括:
115.设置在所述工作台303上的升降台316;
116.设置在所述升降台316上端的镜头移动机构317;
117.以及设置所述镜头移动机构317上的工业相机318,所述工业相机318和所述钢板313以及弹性板314之间的狭缝相对设置。
118.本实施例中,镜头移动机构317上端设置有两个滑套,工业相机318和所述滑套滑动配合,通过工业相机318和滑套的滑动配合实现工业相机318沿轴向的调整。
119.所述下料及分组系统4包括:
120.下料斜坡401,所述下料斜坡401一端位于测量系统3的载物台304上的出料孔305
下方;
121.分组车402,所述分组车402下单设置有行走轮;
122.设置在所述分组车402上并相对所述分组车402滑动配合的支撑架403,所述支撑架403和所述分组车402滑动配合方向沿水平面并垂直下料斜坡401方向;
123.对称设置在所述支撑架403上端面两侧并垂直支撑架403的滑轨404;
124.和所述滑轨404滑动配合的托盘405;
125.由上至下依次设置在所述托盘405上的多个分组盘406,所述分组盘406上设置有v型槽,所述分组盘406一端作为进料端,另一端端部设置有挡板407;所述分组盘406有进料d端至挡板407端向下倾斜;
126.以及分组通道408,所述分组通道408一端和下料斜坡401搭接,另一端和多个分组盘406中的任意一个中的任意一个v型槽搭接。
127.本实施例中分组车402和支撑架403之间的滑动配合采用电动滑轨404,支撑架403和托盘405之间的滑动配合采用气动滑轨404。控制系统控制电动滑轨404和气动滑轨404动作调整不同分组盘406以及不同分组盘406上的v型槽和分组通道408搭接。
128.本实施例中:
129.(1)钢球包装尺寸范围:40mm~80mm;
130.(2)实现高精度测量与分组:经过多次试验,对于高精度钢球实现尺寸再分组,精度达到0.2μm。
131.(3)分组过程全自动:实现钢球的放置、显微测量、图像传感、精确分组全过程完全自动化;
132.(4)针对不同尺寸的钢球,设备具有通用性,且更换装置方便。
133.本发明的产品与钢球生产线连接实现再在线同步测量与分组。钢球首先进入钢球上料系统1,通过提升机构将钢球转运到输送机上,由推杆机构送到测量系统3中钢球储料定位单元,在测量系统3中完成钢球的直径测量与预分组,最后进入钢球分组机构。
134.钢球上料系统1中的储放盘103与水平面有一定的倾斜角度,保证钢球能依靠自重沿斜面滚动到提升机构处。具体上料过程为:钢球在储放盘103中依靠自重滚落到提升机构处,储放盘103中的钢球可以与通过与额外的钢球生产线连接,亦可以在由人工或机器填充,通过电动推杆带动提升机构,实现其上下往复运动,提升机构高于储放盘103出料口高度时会将储放盘103中的钢球拦截在出口处,提升机构每次下落允许一批钢球滚落到输送带107上,通过输送机构将钢球运输至于推杆机构相对的位置,通过步进电机110带动的步进推杆111将钢球推送至测量系统3,步进推杆111与钢球接触端安装有弹性附件112,减少对钢球的损伤。
135.测量系统3中,升降台316为剪式升降台316;本发明选取cmos图下图像传感器作为图像采集及处理的载具。本发明选取的工业相机318像素为4608x3456,靶面宽度10mm,取视场宽度为0.1mm,100倍光学系统,则测量精度0.00217μm/像素,通过光学显微镜对待测目标放大成像,图像传感器把感光面上的光像转变为与光像成比例的电信号;钢球储料定位单元中,钢球放在v形定位结构中间,底侧与球基面定位块307接触。v型定位结构的两个定位块的斜面要经过精磨加工,达到表面光洁,精度高的需求。球基面定位块307通过螺钉固定在固定架308上,其上表面是测量的基准,表面可经过淬火与精磨工艺,使其耐磨且粗糙度
低,降低磨损引起的轴向误差。对于不同直径批次的钢球,只需更换相应的v型定位结构和球基面定位块307,调整工业相机318及两板的位置,即可继续测量,适用范围极广。弹性板314通过螺栓连接固定在钢板313上,通过调节右侧的升降机构312来调整钢板313与弹性板314的整体高度,确定位置后通过固定架308与顶丝315固定;
136.测量系统3具体操作步骤如下:
137.(1)、调整固定轴套310来固定纵向的升降装置的位置,放入同一直径批次的第一个钢球到钢球储料定位单元中,调整移动机构,使弹性板314被钢球轻微弹起,调节三个顶丝315使钢板313和弹性板314的位置固定;
138.(2)、通过调节升降台316与镜头移动机构317来调整工业相机318的位置,使工业相机318对准钢板313与弹性板314之间的狭缝,调整工业相机318的对焦,使之能在计算机上清晰准确的显示狭缝的图像;
139.(3)、在计算机上进行图像处理,测量此时的狭缝宽度,将其分为第一组,并将此时的狭缝宽度标定为测量基准;
140.(4)、继续下一钢球,在计算机上进行图像处理,测量此时的狭缝宽度,将测得的狭缝宽度与测量基准的狭缝宽度进行对比、做差,将钢球按狭缝宽度距离每相差规定差值(如0.1μm)分为一组;
141.(5)、重复步骤(4),直至此直径批次钢球全部完成测量。
142.重复步骤(1)至步骤(5)直至所有批次的待测钢球完成测量。
143.钢球由步进推杆111步进推动,控制一定的步进间隔,步进进入测量系统3的钢球储放定位单元,每步进一次通过工业相机318获取一次狭缝的图像,最后将钢球由进入到离开过程中得到的狭缝图像进行处理,将测量的最小值作为本钢球的测量结果。
144.下料及分组系统4主要实现钢球的自动下料以及钢球的具体分组,钢球在测量系统3中测量完成后下落到下料斜坡401中,最后滚动到分组通道408中进行分组,下料及分组系统4中的分组盘406分为3-5层,可单独使用,亦可成组使用,在分组时可具体根据钢球的直径尺寸范围将钢球分组盘406分为不同组别的分组盘406,每一层分组盘406为一个尺寸小组,或者每个分组盘406中每一个v型槽轨道为一个尺寸组,在滑轨404以及支撑架403和分组车402之间运动的作用下实现前后、上下、左右的运动。
145.图像的灰度化与二值化处理过程:图像的灰度化处理指将彩色图像转化成为灰度图像的过程。彩色图像中的每个像素的颜色有r、g、b三个分量决定,而每个分量有255中值可取,这样一个像素点可以有1600多万(255*255*255)的颜色的变化范围。而灰度图像是r、g、b三个分量相同的一种特殊的彩色图像,其一个像素点的变化范围为255种,所以在数字图像处理种一般先将各种格式的图像转变成灰度图像以使后续的图像的计算量变得少一些。灰度图像的描述与彩色图像一样仍然反映了整幅图像的整体和局部的色度和亮度等级的分布和特征。图像的二值化处理就是将图像上的点的灰度置为0或255,也就是将整个图像呈现出明显的黑白效果。即将256个亮度等级的灰度图像通过适当的阀值选取而获得,仍然可以反映图像整体和局部特征的二值化图像。在数字图像处理中,二值图像占有非常重要的地位,特别是在实用的图像处理中,以二值图像处理实现而构成的系统是很多的,要进行二值图像的处理与分析,首先要把灰度图像二值化,得到二值化图像,这样子有利于再对图像做进一步处理时,图像的集合性质只与像素值为0或255的点的位置有关,不再涉及像
素的多级值,使处理变得简单,而且数据的处理和压缩量小。为了得到理想的二值图像,一般采用封闭、连通的边界定义不交叠的区域。所有灰度大于或等于阀值的像素被判定为属于特定物体,其灰度值为255表示,否则这些像素点被排除在物体区域以外,灰度值为0,表示背景或者例外的物体区域。如果某特定物体在内部有均匀一致的灰度值,并且其处在一个具有其他等级灰度值的均匀背景下,使用阀值法就可以得到比较的分割效果。如果物体同背景的差别表现不在灰度值上(比如纹理不同),可以将这个差别特征转换为灰度的差别,然后利用阀值选取技术来分割该图像。动态调节阀值实现图像的二值化可动态观察其分割图像的具体结果。
146.本系统首先根据工业相机318获取图像,经处理得到狭缝图像,参见附图15,此图像为放大100倍后的钢板313与弹性板314边缘图像。选取边缘较清晰地一段,参见附图16,将该段图像进行二值化处理,得到二值化图像,参见附图17,根据该段图像选取宽度,计算所选宽度下狭缝间的面积,将狭缝面积除以该段宽度,获得狭缝间距离。重复性测量时,不改变图像选取大小与位置,依次测量不同钢球。钢球在计算机数据处理完成之后会进入到出料通道,在计算机程序指导下进入分好的分组盘406中。
147.参见附图18,在测量系统3测量过程中钢球弹性板314变形的物理模型:
148.其中v型槽的位置是固定的,所以同批次钢球的中心在同一条基准线上;上侧钢板313的位置是固定的,所以弹性板314与钢板313间的狭缝有相同的变形基准;
149.图示中上侧为钢板313、中间为弹性板314,两板之间的距离为待测狭缝;
150.设ac间的距离为a,ab间的距离为l;
151.y
de
为待测狭缝的宽度,此处宽度通过图像处理测得;
152.w
be
为弹性板314在b处的变形,其中b处是指弹性板314的自由端;
153.wc为弹性板314在c处的变形;其中c处是待测钢球与指弹性板314接触作用位置;
154.yb为未变形弹性板314的b处到球基面定位块307的上端面的距离;
155.y
db
为未变形弹性板314到钢板313的距离;
156.根据材料力学悬臂梁变形公式进行计算,待测系统中c处的变形为:
[0157][0158]
其中:f为c处弹性板314所受的力;
[0159]
e为弹性板314的弹性模量;
[0160]
i为c处所在横截面的惯性矩;
[0161]
b处的变形为:
[0162][0163]
所以:
[0164][0165]
所以:
[0166]
[0167]
单个钢球的直径为:
[0168]
r=yb wc[0169]
且已知:
[0170]ydb
=y
de
wb[0171]
所以:
[0172]
wb=y
db-y
de
[0173]
同批次第一个钢球的直径为:
[0174]
r1=yb w
c1
[0175]
其中:w
c1
为第一个钢球时c处变形;
[0176]
后续各钢球的直径记为r2、r3、r4
…
:
[0177]
r2=yb w
c2
[0178]
其中:w
c2
为第二个钢球时c处变形;
[0179]
将后续钢球与第一个钢球的直径做差:
[0180]
r2-r1=(yb w
c2
)-(yb w
c1
)
[0181]
r2-r1=w
c2-w
c1
[0182][0183][0184][0185]
其中:y
de1
为第一个钢球测量时狭缝的宽度;
[0186]yde2
为第二个钢球测量时狭缝的宽度;
[0187]
即两钢球直径的差值与狭缝的宽度差成正比,我们用钢球狭缝的宽度来反映实际钢球的直径差,测量精度大大提高。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
