1.本发明涉及拍摄系统、控制装置、控制方法、程序以及存储介质,尤其涉及用于通过无人机来拍摄预先登记的被拍摄体的技术。
背景技术:
2.在专利文献1中公开了以下技术:使用自主飞行机器人来拍摄多个移动物体。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2017-182690号公报
技术实现要素:
6.发明所要解决的问题
7.然而,专利文献1的技术为,为了安防而用自主飞行机器人的摄像机来拍摄侵入到监视空间的不特定多数的侵入者、车辆等移动物体。
8.在由无人机来拍摄预先登记了的被拍摄体的情况下,可能需要使用预先登记了的被拍摄体的信息来进行拍摄。
9.本发明的目的在于,提供一种能够由无人机来拍摄预先登记了的被拍摄体的技术。
10.用于解决问题的方案
11.本发明的第1方式涉及的拍摄系统具有:无人机,其具有在飞行状下能够拍摄被拍摄体的拍摄部件;以及控制装置,其能够与所述被拍摄体的终端及所述无人机进行通信,该拍摄系统的特征在于,
12.所述控制装置具备:
13.存储部件,其登记将所述被拍摄体设定为拍摄对象的被拍摄体信息;
14.判定部件,其根据通过与所述终端进行通信而获取到的该被拍摄体的位置信息和地图信息,判定该被拍摄体是否位于规定的拍摄区域;
15.信号生成部件,其生成根据所述判定部件的判定来控制所述拍摄部件的控制信号;以及
16.通信控制部件,其向所述无人机发送所述被拍摄体信息和所述控制信号,
17.所述无人机具备:
18.确定部件,其根据由所述被拍摄体的终端发布的被拍摄体信息和由所述通信控制部件发送的所述被拍摄体信息,来确定所述被拍摄体;以及
19.拍摄控制部件,其根据所述控制信号控制所述拍摄部件,控制由所述确定部件确定的所述被拍摄体的拍摄。
20.在本发明的第2方式涉及的拍摄系统中,所述存储部件登记组信息作为所述被拍摄体信息,其中所述组信息是指将构成所述被拍摄体的多台车辆的用户设定为拍摄对象的
组的信息,
21.所述判定部件根据所述被拍摄体的位置信息和地图信息来判定该被拍摄体是否正在规定的拍摄区域中行驶。
22.在本发明的第3方式涉及的拍摄系统中,其特征在于,
23.所述判定部件在判定为被设定为所述组的所述多台车辆中的至少一台车辆已进入所述拍摄区域的情况下,判定为所述多台车辆正在所述拍摄区域中行驶,
24.所述信号生成部件生成指示开始拍摄的控制信号,
25.所述拍摄控制部件根据该控制信号控制所述拍摄部件,来开始拍摄所述多台车辆的组。
26.在本发明的第4方式涉及的拍摄系统中,其特征在于,
27.在所述判定部件判定为所述多台车辆中的至少一台车辆正在所述拍摄区域中行驶的情况下,
28.所述信号生成部件生成指示继续拍摄的控制信号,
29.所述拍摄控制部件根据该控制信号控制所述拍摄部件使所述拍摄继续,
30.在所述判定部件判定为所述多台车辆全部驶出所述拍摄区域的情况下,
31.所述信号生成部件生成指示结束拍摄的控制信号,
32.所述拍摄控制部件根据该控制信号控制所述拍摄部件结束所述拍摄。
33.在本发明的第5方式涉及的拍摄系统中,其特征在于,
34.所述判定部件在判定为被设定为所述组的所述多台车辆全部已进入所述拍摄区域的情况下,判定为所述多台车辆正在所述拍摄区域中行驶,
35.所述信号生成部件生成指示开始拍摄的控制信号,
36.所述拍摄控制部件根据该控制信号控制所述拍摄部件,开始拍摄所述多台车辆的组。
37.在本发明的第6方式涉及的拍摄系统中,其特征在于,
38.在所述判定部件判定为所述多台车辆中的至少一台车辆已进入所述拍摄区域或者设定在所述拍摄区域的近前的规定的准备区域的情况下,
39.所述信号生成部件生成区域告知信号,该区域告知信号是用于向所述用户告知已进入该拍摄区域或者准备区域的信号,
40.所述通信控制部件向所述多台车辆发送所述区域告知信号。
41.在本发明的第7方式涉及的拍摄系统中,其特征在于,
42.所述控制装置还具备:
43.图像处理部件,其进行从由所述拍摄部件拍摄到的图像数据中提取所述用户的面部的图像处理;以及
44.图像判定部件,其根据所述图像处理的结果和所述组信息,判定是否拍摄到被设定为所述组的人数的量的用户的面部,
45.在没有拍摄到所述被设定的人数的量的用户的面部的情况下,为了能够拍摄到所述被设定的人数的量的用户的面部,所述信号生成部件生成控制所述拍摄部件的拍摄参数的参数控制信号,
46.所述无人机的所述拍摄控制部件根据所述参数控制信号控制所述拍摄部件进行
所述拍摄。
47.在本发明的第8方式涉及的拍摄系统中,其特征在于,
48.根据所述图像判定部件的判定,在没有拍摄到所述被设定的人数的量的用户的面部的情况下,
49.所述信号生成部件生成引导所述用户重新进行所述拍摄的拍摄引导信号,
50.所述通信控制部件向所述多台车辆发送所述拍摄引导信号。
51.在本发明的第9方式涉及的拍摄系统中,其特征在于,
52.所述判定部件根据所述位置信息获取在所述拍摄区域或者设定在所述拍摄区域的近前的规定的准备区域中行驶的所述多台车辆的车距,在判定为所述车距超过规定的基准距离范围的上限距离的情况下,
53.所述信号生成部件生成距离告知信号,该距离告知信号是用于向所述用户告知所述车距超过所述基准距离范围的上限距离的信号,
54.所述通信控制部件向所述多台车辆发送所述距离告知信号。
55.在本发明的第10方式涉及的拍摄系统中,其特征在于,
56.所述判定部件根据所述位置信息获取在所述拍摄区域或者设定在所述拍摄区域的近前的规定的准备区域中行驶的所述多台车辆的车距,在判定为所述车距在规定的基准距离范围的下限距离以下的情况下,
57.所述信号生成部件生成靠近告知信号,该靠近告知信号是用于向所述用户告知所述车距在所述基准距离范围的下限距离以下的信号,
58.所述通信控制部件向所述多台车辆发送所述靠近告知信号。
59.在本发明的第11方式涉及的拍摄系统中,其特征在于,
60.所述多台车辆具备:
61.获取部件,其获取车辆的位置信息;
62.车辆通信部件,其发送所述车辆的位置信息;以及
63.检测部件,其检测所述车辆的速度信息,
64.所述车辆通信部件向所述控制装置发送所述速度信息,
65.所述控制装置的所述判定部件根据所述速度信息获取在所述拍摄区域或者设定在所述拍摄区域的近前的规定的准备区域中行驶的所述多台车辆的速度差,在判定为所述速度差超过规定的基准速度的情况下,
66.所述信号生成部件生成速度告知信号,该速度告知信号是用于向所述用户告知所述速度差超过所述基准速度的信号,
67.所述通信控制部件向所述多台车辆发送所述速度告知信号。
68.在本发明的第12方式涉及的拍摄系统中,其特征在于,
69.所述控制装置还具备逆光判定部件,该逆光判定部件根据由所述拍摄部件拍摄到的图像数据来判定拍摄状态是否为逆光,
70.在判定为所述拍摄状态是逆光的情况下,所述信号生成部件生成指示变更所述无人机的飞行位置以避免所述逆光的飞行控制信号,
71.所述通信控制部件向所述无人机发送所述飞行控制信号,
72.所述无人机的飞行控制部件根据所述飞行控制信号来变更所述飞行位置。
73.在本发明的第13方式涉及的拍摄系统中,其特征在于,
74.在判定为所述拍摄状态是逆光的情况下,所述信号生成部件生成参数控制信号,以进行使所述拍摄部件的视场角沿水平方向移动的控制、或者使所述拍摄部件的视场角沿垂直方向移动的控制,
75.所述通信控制部件向所述无人机发送所述参数控制信号,
76.所述无人机的拍摄控制部件根据所述参数控制信号来变更所述拍摄部件的视场角。
77.在本发明的第14方式涉及的拍摄系统中,其特征在于,
78.所述存储部件登记用户信息作为所述被拍摄体信息,其中所述用户信息是指将构成所述被拍摄体的行人或者单独的车辆的用户设定为拍摄对象的信息,
79.所述判定部件根据所述被拍摄体的位置信息和地图信息判定该被拍摄体是否已进入规定的拍摄区域。
80.在本发明的第15方式涉及的拍摄系统中,其特征在于,
81.在所述判定部件判定为被设定为所述拍摄对象的所述被拍摄体已进入所述拍摄区域的情况下,
82.所述信号生成部件生成指示开始拍摄的控制信号,
83.所述拍摄控制部件根据该控制信号控制所述拍摄部件,开始拍摄所述被拍摄体。
84.在本发明的第16方式涉及的拍摄系统中,其特征在于,
85.在所述判定部件判定为所述被拍摄体已进入所述拍摄区域或者设定在所述拍摄区域的近前的规定的准备区域的情况下,
86.所述信号生成部件生成区域告知信号,该区域告知信号是用于向所述被拍摄体告知已进入该拍摄区域或者准备区域的信号,
87.所述通信控制部件向所述被拍摄体发送所述区域告知信号。
88.在本发明的第17方式涉及的拍摄系统中,其特征在于,
89.所述控制装置还具备:
90.图像处理部件,其进行从由所述拍摄部件拍摄到的图像数据中提取所述被拍摄体的面部的图像处理;以及
91.图像判定部件,其根据所述图像处理的结果判定是否拍摄到所述被拍摄体的面部,
92.在没有拍摄到所述被拍摄体的面部的情况下,为了能够拍摄到所述被拍摄体的面部,所述信号生成部件生成控制所述拍摄部件的拍摄参数的参数控制信号,
93.所述无人机的所述拍摄控制部件根据所述参数控制信号控制所述拍摄部件进行所述拍摄。
94.在本发明的第18方式涉及的拍摄系统中,其特征在于,
95.根据所述图像判定部件的判定,在没有拍摄到所述被拍摄体的面部的情况下,
96.所述信号生成部件生成引导所述被拍摄体重新进行所述拍摄的拍摄引导信号,
97.所述通信控制部件向所述被拍摄体发送所述拍摄引导信号。
98.本发明的第19方式涉及的控制装置能够与无人机进行通信,该无人机具有能够以飞行状态拍摄被拍摄体的拍摄部件,其特征在于,具有:
99.存储部件,其登记将所述被拍摄体设定为拍摄对象的被拍摄体信息;
100.判定部件,其根据所述被拍摄体的位置信息和地图信息来判定该被拍摄体是否位于规定的拍摄区域;
101.信号生成部件,其生成根据所述判定部件的判定来控制所述拍摄部件的控制信号;以及
102.通信控制部件,其向所述无人机发送所述被拍摄体信息和所述控制信号。
103.本发明的第20方式涉及的控制方法是控制装置中的控制方法,所述控制装置能够与无人机进行通信,该无人机具有能够以飞行状态拍摄被拍摄体的拍摄部件,其特征在于,具有:
104.存储工序,将被拍摄体信息登记在存储部件中,其中所述被拍摄体信息是将所述被拍摄体设定为拍摄对象的信息;
105.判定工序,判定部件根据所述被拍摄体的位置信息和地图信息,判定该被拍摄体是否位于规定的拍摄区域中;
106.信号生成工序,信号生成部件生成根据所述判定工序中的判定控制所述拍摄部件的控制信号;以及
107.通信控制工序,通信控制部件向所述无人机发送所述被拍摄体信息和所述控制信号。
108.本发明的第21方式涉及的程序使计算机执行控制装置中的控制方法的各工序,所述控制装置能够与无人机进行通信,该无人机具有能够以飞行状态拍摄被拍摄体的拍摄部件,其特征在于,
109.该控制方法具有:
110.存储工序,将被拍摄体信息登记在存储部件中,其中所述被拍摄体信息是将所述被拍摄体设定为拍摄对象的信息;
111.判定工序,判定部件根据所述被拍摄体的位置信息和地图信息,判定该被拍摄体是否位于规定的拍摄区域中;
112.信号生成工序,信号生成部件生成根据所述判定工序中的判定控制所述拍摄部件的控制信号;以及
113.通信控制工序,通信控制部件向所述无人机发送所述被拍摄体信息和所述控制信号。
114.本发明的第22方式涉及的存储介质是一种计算机可读的存储介质,该计算机可读的存储介质存储有使计算机执行控制装置中的控制方法的各工序的程序,所述控制装置能够与无人机进行通信,该无人机具有能够以飞行状态拍摄被拍摄体的拍摄部件,其特征在于,
115.该控制方法具有:
116.存储工序,将被拍摄体信息登记在存储部件中,其中所述被拍摄体信息是将所述被拍摄体设定为拍摄对象的信息;
117.判定工序,判定部件根据所述被拍摄体的位置信息和地图信息,判定该被拍摄体是否位于规定的拍摄区域中;
118.信号生成工序,信号生成部件生成根据所述判定工序中的判定控制所述拍摄部件
的控制信号;以及
119.通信控制工序,通信控制部件向所述无人机发送所述被拍摄体信息和所述控制信号。
120.发明的效果
121.根据本发明的第1方式的拍摄系统,能够提供一种能够通过无人机拍摄预先登记的被拍摄体的技术。
122.根据本发明的第2方式的拍摄系统,能够提供一种能够将预先登记为组的多台车辆的用户作为被拍摄体,通过无人机来拍摄正在通过车辆行驶的用户的技术。
123.根据本发明的第3方式的拍摄系统,能够控制开始拍摄的时刻,即使在拍摄区域小或者组中的车辆的车距拉开等情况下,也能够拍摄到最初进入拍摄区域的车辆。
124.根据本发明的第4方式的拍摄系统,能够控制结束拍摄的时刻,由此能够无遗漏地拍摄被设定为组的多台车辆。
125.根据本发明的第5方式的拍摄系统,能够控制开始拍摄的时刻,能够在被设定为组的所有多台车辆均进入拍摄区域的情况下进行拍摄,由此能够仅拍摄满足用户的需要的影像。
126.根据本发明的第6方式的拍摄系统,通过在拍摄前向用户告知区域告知信号,能够进行将组中的车辆彼此的队列排列好等、准备好拍摄的行驶。
127.根据本发明的第7方式的拍摄系统,通过根据参数控制信号控制拍摄部,能够拍摄组全员的面部。
128.根据本发明的第8方式的拍摄系统,即使在无法拍摄到用户全员的面部的情况下,通过生成引导用户重新进行拍摄的拍摄引导信号,且向多台车辆发送拍摄引导信号,能够在拍摄区域中立即进行重新拍摄。
129.根据本发明的第9方式的拍摄系统,在车距过于拉开的情况下,当在拍摄区域中行驶时可能无法同时拍摄多个用户,因此,能够通过向多台车辆发送告知车距超过基准距离范围的上限距离的距离告知信号向用户进行告知,来催促缩小车距。
130.根据本发明的第10方式的拍摄系统,在车距过于靠近的情况下,当在拍摄区域中行驶时多个用户重叠,可能无法同时进行拍摄,因此,能够通过向多台车辆发送告知车距在基准距离范围的下限距离以下的靠近告知信号向用户进行告知,来催促拉大车距。
131.根据本发明的第11方式的拍摄系统,在速度差超过基准速度的情况下,当在拍摄区域中行驶时可能无法同时拍摄到多个用户,因此,能够通过向多台车辆发送告知速度差超过基准速度的速度告知信号向用户进行告知,来催促缩小速度差。
132.根据本发明的第12方式的拍摄系统,在根据拍摄到的图像数据判断为是逆光的拍摄状态的情况下,能够通过变更无人机的飞行位置来以避免逆光的状态进行拍摄。
133.根据本发明的第13方式的拍摄系统,在根据拍摄到的图像数据判断为是逆光的拍摄状态的情况下,能够通过变更拍摄部的视场角来以避免逆光的状态进行拍摄。
134.根据本发明的第14方式的拍摄系统,能够提供将预先登记的行人或者单独的车辆的用户作为被拍摄体,通过无人机来拍摄行人或者单独的车辆的用户的技术。
135.根据本发明的第15方式的拍摄系统,能够控制开始拍摄的时刻。由此,即使在拍摄区域小的情况下,也能够不错过拍摄的时刻地进行被拍摄体的拍摄。
136.根据本发明的第16方式的拍摄系统,通过在拍摄前告知被拍摄体区域告知信号,被拍摄体能够进行拍摄的事前准备。
137.根据本发明的第17方式的拍摄系统,通过根据参数控制信号控制拍摄部,能够拍摄到作为被拍摄体的行人的面部、或者正在借助单独的车辆行驶的用户的面部。
138.根据本发明的第18方式的拍摄系统,即使在无法拍摄到被拍摄体的面部的情况下,通过生成引导被拍摄体重新进行拍摄的拍摄引导信号,且向被拍摄体的终端发送拍摄引导信号,能够在拍摄区域中立即重新进行拍摄。
139.根据本发明的第19方式的控制装置、第20方式的控制方法、第21方式的程序及第22方式涉及的存储介质,能够提供一种用于通过无人机来拍摄预先登记的被拍摄体的控制技术。
附图说明
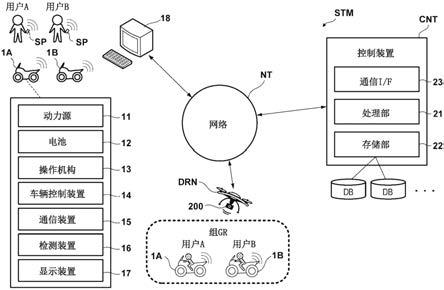
140.图1是用于说明第1实施方式涉及的拍摄系统的一例的框图。
141.图2中的st21是例示无人机的功能结构的框图,st22是例示处理部的功能结构的框图。
142.图3是示意性地说明判定部的处理的图。
143.图4是说明存储部和处理部的处理的流程的图。
144.图5是说明图像处理部和图像判定部的处理的流程的图。
145.图6是说明多台车辆的车距的调整处理的流程的图。
146.图7是说明多台车辆的速度差的调整处理的流程的图。
具体实施方式
147.下面,参照附图对实施方式详细进行说明。另外,以下的实施方式并没有限定权利要求书涉及的发明,另外,在实施方式中说明的特征的组合不一定全部是发明所必须的特征。
148.[第1实施方式]
[0149]
(拍摄系统的结构)
[0150]
图1是示出第1实施方式涉及的拍摄系统stm的结构的一例的图。拍摄系统stm具有无人机drn和控制装置cnt(控制服务器),该控制装置cnt能够与被拍摄体的终端及无人机drn进行通信。无人机drn具有能够以飞行状态拍摄多台车辆的拍摄部200(摄像机)。被拍摄体例如包括行人、或者单独的车辆的用户、或者多台车辆的用户。在第1实施方式中,说明将构成被拍摄体的多台车辆的用户作为拍摄对象的组进行说明的例子。
[0151]
控制装置cnt能够通过网络nt与多台车辆1a、1b及无人机drn进行远程通信,且能够通过网络nt输出控制无人机drn的信号。
[0152]
信息处理装置18是管理车辆的借出(车辆使用服务)的外部终端,当车辆被用户借出时,通过网络nt向控制装置cnt发送用于确定用户的用户信息(例如,包括用户的终端信息)、用于识别被借出的车辆的车辆信息。信息处理装置18(外部终端)例如能够设置于酒店或汽车租赁代理商、提供车辆的销售、保养服务的经销商等的外部据点(代理店)。
[0153]
外部据点(代理店)能够提供以下服务:将借出车辆的多个用户a、b作为组gr,通过
无人机drn来拍摄正通过车辆1a、1b行驶的用户a、b。
[0154]
当通过通信接口部23(通信i/f)获取到从信息处理装置18(外部终端)发送的信息(用户信息(包括用户的终端信息)、车辆信息)时,控制装置cnt将被拍摄体信息登记在存储部22的数据库db中,其中所述被拍摄体信息是将被拍摄体设定为拍摄对象的信息。在将构成被拍摄体的多台车辆的用户作为拍摄对象的组的情况下,控制装置cnt将组信息登记在存储部22的数据库db中,其中所述组信息是将多台车辆1a、1b的用户a、b设定为一个组gr的信息。并且,在被设定为组的多台车辆正在规定的拍摄区域中行驶的情况下,控制装置cnt的处理部21生成控制无人机drn的拍摄部200的控制信号,且将该控制信号通过网络nt发送给无人机drn。
[0155]
无人机drn的拍摄部200能够根据由控制装置cnt发送的控制信号来进行拍摄。由拍摄部200拍摄到的图像被通过网络nt发送给控制装置cnt,且保存在存储部22的数据库db中。当归还被借出的车辆时,能够通过信息处理装置18(外部终端)或者多个用户a、b的终端、例如通过移动终端sp(例如,智能手机)以预览显示的方式来确认(阅览)拍摄到的图像,在用户a、b喜欢拍摄图像的情况下能够购买图像数据。在购买图像数据的情况下,可以将图像数据下载至多个用户a、b的移动终端sp(智能手机),也可以在cd-rom、dvd等存储介质中保存图像数据来向用户提供。在后面详细说明控制装置cnt的处理部21以及无人机drn的具体的功能结构。
[0156]
在实施方式中,作为多台车辆的例子,车辆1a、1b例如能够使用跨骑式车辆等电动型的两轮车辆。另外,跨骑式车辆是指驾驶员跨越车身来乘车的类型的车辆,在其概念中还包括踏板车式的两轮车等。
[0157]
车辆a、车辆b具有同样的结构,在以下说明中,作为代表,对车辆1a的结构进行说明。另外,作为多台车辆的例子,在图1中示出二台车辆1a、1b的例子,但并不限定于该例子,还能够由三台以上的车辆来构成组。
[0158]
车辆1a具有动力源11、向车辆供给电力的电池12(电源装置)、操作机构13、控制车辆的车辆控制装置14以及通信装置15。在实施方式中,动力源11是电动马达,电池12能够向动力源11和构成车辆1的各要素供给电力。电池12例如使用能充电的二次电池,作为其例子,能够举出铅蓄电池、锂离子电池、镍氢电池等。电池12通过经由电缆连接于能供给规定的电压的电源来进行充电。另外,也可以在设置于行驶路径的途中的电池更换站更换为已充电的电池,且将已充电的电池12安装在车辆中。
[0159]
操作机构13构成为,能够输入用于控制动力源11的操作,例如根据由用户输入的操作向后述的车辆控制装置14输出规定的信号。作为对操作机构13进行的操作输入的例子,能够举出使用与车辆对应的规定的钥匙(点火钥匙、远程钥匙等)进行的转动操作、使用按压式开关(启动开关等)进行的按压操作等。
[0160]
车辆控制装置14是能够进行车辆1a整体的动作控制的ecu(电子控制单元),例如能够通过规定的信号线在与车辆1a的各结构要素之间进行信号的收发。作为一例,车辆控制装置14能够以接收与对操作机构13进行的操作输入对应的信号来启动动力源11的方式进行控制。
[0161]
车辆控制装置14的功能还能够通过硬件和软件中的任一方来实现。例如,车辆控制装置14的功能也可以通过cpu(中央运算装置)使用存储器执行规定的程序来实现。或者,
车辆控制装置14的功能也可以通过pld(可编程逻辑器件)、asic(专用集成电路)等公知的半导体装置来实现。另外,在此,示出车辆控制装置14为单一的要素,车辆控制装置14也可以根据需要分为2个以上的要素。
[0162]
通信装置15具有用于通过网络nt实现与控制装置cnt的通信的天线。另外,通信装置15包括进行信号处理的tcu(车联网控制单元)等,该信号处理用于通过网络nt实现与控制装置cnt的通信。
[0163]
tcu能够从电池12获取表示电池12的电压值的电压信息,另外,tcu能够从车辆控制装置14(ecu)获取表示车辆1的控制状态的控制信息。tcu通过网络nt向控制装置cnt发送获取到的电池12的电压信息和车辆控制装置14(ecu)的控制信息。另外,tcu能够根据从控制装置cnt接收到的信息,介入车辆控制装置14中的车辆控制。
[0164]
通信装置15能够在与构成组gr的多台车辆间进行车车间通信,车辆1a的通信装置15能够与构成组gr的其他车辆1b进行无线通信,且在车辆间进行信息交换。车辆控制装置14能够进行控制,以便通过车辆间的车车间通信在组gr内调整在拍摄区域内行驶时的速度、车距。
[0165]
检测装置16包括检测车辆1a的各种状态的各种传感器,例如包括陀螺仪传感器、gps传感器、检测车速信息的车速传感器等。车辆控制装置14能够根据由检测装置16检测到的信息来控制车辆1a,通信装置15能够通过网络nt向控制装置cnt发送检测装置16的检测结果。
[0166]
陀螺仪传感器检测车辆1a的转动运动。车辆控制装置14能够根据陀螺仪传感器的检测结果、车速传感器等来判定车辆1a的行进道路。gps传感器检测车辆1a的当前位置。另外,通信装置15还能与提供地图信息或交通信息的服务器装置进行无线通信,获取车辆1a的当前位置的信息。
[0167]
在实施方式中,通信装置15和检测装置16作为获取车辆的位置信息的获取部来发挥作用,通信装置15作为通过网络nt发送车辆的位置信息的车辆通信部来发挥作用。
[0168]
显示装置17构成为,能够与速度计、转速表一起,显示电池12的电池剩余电量、从控制装置cnt接收到的告知信息。当在拍摄区域中行驶时,如果从控制装置cnt接收到组gr的车辆间与车速、车距有关的告知信息,则显示装置17能够向用户显示告知信息,催促用户进行与车速、车距有关的调整。由此,作为进行拍摄时的拍摄准备,能够以在组gr内调整了车速和车距的状态在拍摄区域中行驶。
[0169]
控制装置cnt具有处理部21、存储部22以及通信接口部23(通信i/f),例如被设置于进行车辆使用服务的管理公司。处理部21由具备cpu和存储器的处理器构成,存储部22由作为程序的处理区域的ram、存储各种程序、数据的rom、容量比较大的hdd(硬盘驱动器)构成。另外,也可以分散配置在云上。
[0170]
例如,处理部21能够通过通信接口部23,经由网络nt与车辆1a、1b、无人机drn进行通信,将针对车辆1a、1b、无人机drn的信息存储在存储部22中,或者从存储部22读出针对车辆1a、1b、无人机drn的信息。另外,能够将由无人机drn的拍摄部200拍摄到的图像数据存储在存储部22中。
[0171]
当车辆被用户借出时,通过网络nt向控制装置cnt发送用于确定用户的用户信息、用于识别被借出的车辆的车辆信息。存储部22登记将被拍摄体设定为拍摄对象的被拍摄体
信息。在此,在被拍摄体信息中包括用户的终端信息、用户使用的车辆的车辆信息。在将多台车辆的用户作为被拍摄体的情况下,存储部22能够登记将多台车辆的用户设定为一个组gr的组信息。在图1的例子中,组gr由使用车辆1a的用户a和使用车辆1b的用户b构成。另外,在图1的例子中,组gr是一个,但是存储部22也能够登记与多个组有关的组信息。
[0172]
(无人机drn的功能结构)
[0173]
接着,说明无人机drn的功能结构。图2的st21是例示无人机drn的功能结构的框图。拍摄部200是搭载于无人机drn的摄像机,拍摄部200构成为能够以无人机drn的飞行状态拍摄多台车辆。无人机drn的拍摄部200能够进行静态图像或者动态图像的拍摄。
[0174]
通信接口部201(通信i/f)能够通过网络nt与车辆1a、1b、控制装置cnt进行通信。通信接口部201将由拍摄部200拍摄到的图像数据发送给控制装置cnt。
[0175]
确定部202根据由被拍摄体的终端(移动终端sp)发布的被拍摄体信息和由控制装置cnt(通信控制部230)发送的被拍摄体信息来确定被拍摄体。另外,用于确定被拍摄体的信息并不限定于由被拍摄体的终端发布的被拍摄体信息,还能够根据由多台车辆1a、1b发布的车辆信息和由控制装置cnt发送的被拍摄体信息(组信息)所包含的车辆信息,来确定构成组gr的多台车辆。
[0176]
当无人机drn进行拍摄时,作为用于确定组gr的信息,从控制装置cnt的通信接口部23向无人机drn发送包括用于识别车辆的车辆信息的组信息。另外,多台车辆1a、1b在行驶中由通信装置15发布用于识别车辆的车辆信息,对照车辆信息,由此确定部202能够根据从控制装置cnt的通信接口部23发送的组信息来确定构成组gr的多台车辆。
[0177]
拍摄控制部203根据控制信号控制拍摄部200,控制由确定部202确定的多台车辆的拍摄。当接收到从控制装置cnt发送的控制信号(参数控制信号)时,拍摄控制部203能够根据控制信号,进行使拍摄部200的视场角沿水平方向移动的控制(pan控制)、使拍摄部200的视场角沿垂直方向移动的控制(tilt控制)、放大(zoom up)或者缩小(zoom out)视场角来拍摄的控制。
[0178]
旋翼204以电机205为驱动源来进行旋转,产生无人机drn的推进力。为了控制飞行状态下的姿势,无人机drn设置有至少4个旋翼204和马达205,飞行控制部207能够控制各电机205的输出。飞行控制部207能够根据由控制装置cnt发送的控制信号,盘旋来变更飞行位置,或者变更飞行高度。
[0179]
传感器206例如是距离传感器,检测由确定部202确定的多台车辆与无人机drn的距离。
[0180]
(处理部21的功能结构)
[0181]
接着,对控制装置cnt的处理部21的具体的功能结构进行说明。图2的s t22是例示处理部21的功能结构的框图。图3是示意性地说明判定部210的处理的图。
[0182]
判定部210能够进行各种判定处理,根据通过与被拍摄体的终端进行通信而获取到的被拍摄体的位置信息和地图信息,判定被拍摄体是否位于规定的拍摄区域。例如,在将多台车辆的用户作为被拍摄体的情况下,判定部210根据被设定为组gr的多台车辆1a、1b的位置信息和地图信息,判定多台车辆1a、1b是否正在规定的拍摄区域中行驶。判定部210能够访问在存储部22中构建的地图信息的数据库,判定部210将多台车辆的位置信息和地图信息进行比较,来判定多台车辆是否正在设定的拍摄区域中行驶。
[0183]
例如,如图3的st31所示,在拍摄区域小于作为基准的区域(距离短)的情况下、组gr中的车辆1a、1b的车距正在拉开的情况下等,当判定部210判定为被设定为组gr的多台车辆1a、1b中的至少一台车辆(车辆1a)已进入拍摄区域时,判定部210判定为多台车辆1a、1b正在拍摄区域中行驶。
[0184]
另外,如图3的st32所示,在拍摄区域大于作为基准的区域(距离长)的情况下等,当被设定为组gr的多台车辆1a、1b全部进入拍摄区域时,判定部210判定为多台车辆正在拍摄区域中行驶。
[0185]
信号生成部220能够根据判定部210的判定生成各种信号,例如根据判定部210的判定生成控制无人机drn的拍摄部200的控制信号。
[0186]
在没有开始拍摄的状态下,在判定部210判定为多台车辆正在拍摄区域中行驶的情况下,信号生成部220生成指示开始拍摄的控制信号。
[0187]
另外,在开始拍摄后,在判定部210判定为多台车辆中的至少一台车辆正在拍摄区域中行驶的情况下,信号生成部220生成指示继续拍摄的控制信号。
[0188]
并且,如图3的st33所示,在判定部210判定为多台车辆1a、1b全部从拍摄区域驶出的情况下,信号生成部220生成指示结束拍摄的控制信号。
[0189]
通信控制部230能够通过通信接口部23来发送由信号生成部220生成的信号,例如,通过通信接口部23向无人机drn发送由信号生成部220生成的控制信号。
[0190]
当开始拍摄时,通信控制部230向无人机drn发送被拍摄体信息和控制信号。在将多台车辆的用户作为被拍摄体的情况下,存储部22登记将构成被拍摄体的多台车辆的用户设定为拍摄对象的组的组信息,作为被拍摄体信息的一部分。在该情况下,通信控制部230向无人机drn发送被拍摄体信息(包括组信息)和控制信号。由此,无人机drn的确定部202能够根据组信息确定构成组gr的多台车辆,且能够由拍摄部200拍摄被确定的多台车辆。
[0191]
另外,在判定部210判定为多台车辆中的至少一台车辆已进入拍摄区域或者设定在拍摄区域的近前的规定的准备区域的情况下,信号生成部220生成向用户告知已进入拍摄区域或准备区域的区域告知信号,通信控制部230还能够向多台车辆发送区域告知信号。
[0192]
通过在拍摄前向用户告知区域告知信号,能够进行将组gr中的车辆彼此的队列排列好等、准备好拍摄的行驶。
[0193]
在继续拍摄或者结束拍摄的情况下,通信控制部230向无人机drn发送由信号生成部220生成的指示继续拍摄的控制信号、或者指示结束拍摄的控制信号。
[0194]
无人机drn的拍摄控制部203根据指示继续拍摄的控制信号来控制拍摄部200,以继续拍摄的方式进行控制。另外,无人机drn的拍摄控制部203根据指示结束拍摄的控制信号来控制拍摄部200,以结束拍摄的方式进行控制。
[0195]
图像处理部240还能够进行从由无人机drn的拍摄部200拍摄到的图像数据中提取用户的面部的图像处理。在图像数据是动态图像的情况下,图像处理部240对各帧的图像进行图像处理。另外,图像处理部240还能够对以规定的帧率进行采样得到的图像进行图像处理。
[0196]
图像判定部250根据图像处理的结果和组信息,判定是否拍摄到被设定为组gr的人数的量的用户的面部。例如,在通过图像处理提取出被设定为组gr的用户a、b、二人的量的用户的面部的情况下,即在组gr的设定数(n1)与在图像处理中提取出的提取数(n2)相等
的情况下(n1=n2),图像判定部250判定为拍摄到构成组gr的用户全员的面部。
[0197]
另一方面,在根据图像处理的结果提取出的用户的面部是一个人的面部的情况下,即在组gr的设定数(n1=2)与在图像处理中提取出的提取数(n2=1)不相等的情况下(在该情况下,n1》n2),图像判定部250判定为没有拍摄到被设定为组gr的人数的量的用户的面部。
[0198]
逆光判定部260根据由拍摄部200拍摄到的图像数据来判定是否逆光。例如,在由拍摄部200拍摄到的图像数据中包含像素值局部超过基准像素值的区域的情况下,逆光判定部260能够判定为是以逆光的拍摄状态拍摄到的图像。在该情况下,信号生成部220生成指示变更无人机drn的飞行位置以避免逆光的飞行控制信号,或者以变更拍摄部200的视场角的方式生成控制信号。在图5的步骤s570之后的与逆光判定有关的追加处理中说明具体的处理。
[0199]
(处理流程)
[0200]
图4是说明存储部22和处理部21(判定部210、信号生成部220、通信控制部230)的处理的流程的图。
[0201]
在步骤s400中,存储部22登记组gr的信息。当控制装置cnt通过通信接口部23获取到由信息处理装置18(外部终端)发送的信息(用户信息、车辆信息)时,存储部22在数据库db中登记将多台车辆1a、1b的用户a、b设定为一个组gr的组信息。
[0202]
在步骤s405中,判定部210从在存储部22中构建的地图信息的数据库获取地图信息。
[0203]
在步骤s410中,判定部210获取多台车辆的位置信息,在步骤s415中,判定部210根据被设定为组gr的多台车辆1a、1b的位置信息和地图信息,来判定多台车辆1a、1b是否正在规定的拍摄区域中行驶。
[0204]
在步骤s415的判定中判定为车辆没有在拍摄区域中行驶的情况下(s415为否),判定部210使处理返回步骤s410,重复同样的处理。
[0205]
另一方面,在步骤s415的判定中判定为车辆正在拍摄区域中行驶的情况下(s415为是),处理进入步骤s420。
[0206]
在步骤s420中,信号生成部220生成指示开始拍摄的控制信号,作为根据判定部210的判定来控制无人机drn的拍摄部200的控制信号。
[0207]
然后,在步骤s425中,通信控制部230向无人机drn发送被登记的组gr的信息和生成的控制信号。
[0208]
无人机drn的确定部202根据组信息确定构成组gr的多台车辆,通过拍摄部200拍摄所确定的多台车辆。
[0209]
在步骤s430中,判定部210判定多台车辆1a、1b是否全部驶出拍摄区域,在判定部210判定为车辆没有全部驶出拍摄区域的情况下(s430为否)、即判定部210判定为多台车辆中的至少一台车辆正在拍摄区域中行驶的情况下,处理进入步骤s435。
[0210]
在步骤s435中,信号生成部220生成指示继续拍摄的控制信号,在步骤s440中,通信控制部230向无人机drn发送由信号生成部220生成的指示继续拍摄的控制信号。当接收到指示继续拍摄的控制信号时,无人机drn的拍摄控制部203根据指示继续拍摄的控制信号来控制拍摄部200,以继续拍摄的方式进行控制。
[0211]
另一方面,在步骤s430的判定中判定部210判定为多台车辆1a、1b全部驶出拍摄区域的情况下(s430为是),在步骤s445中,信号生成部220生成指示结束拍摄的控制信号。
[0212]
然后,在步骤s450中,通信控制部230向无人机drn发送由信号生成部220生成的指示结束拍摄的控制信号。当接收到指示结束拍摄的控制信号时,无人机drn的拍摄控制部203根据指示结束拍摄的控制信号来控制拍摄部200,以结束拍摄的方式进行控制。
[0213]
(图像处理部和图像判定部的处理流程)
[0214]
图5是说明图像处理部240和图像判定部250的处理的流程的图。在步骤s500中,图像处理部240获取由无人机drn的拍摄部200拍摄到的图像数据。
[0215]
在步骤s510中,图像处理部240进行从图像数据中提取用户的面部的图像处理。
[0216]
在步骤s520中,图像判定部250根据在步骤s510中获取到的图像处理的结果和预先登记的组信息,对是否拍摄到被设定为组gr的人数的量的用户的面部进行图像判定。
[0217]
在步骤s520的判定中判定为拍摄到被设定的人数的量的用户的面部的情况下(s520为是),处理进入步骤s530。
[0218]
然后,在步骤s530中,存储部22将拍摄到的图像数据存储在数据库中,结束处理。
[0219]
当归还借出的车辆时,能够通过信息处理装置18(外部终端)或者多个用户a、b的移动终端sp以预览显示的方式提供被存储在数据库中的图像数据。在用户a、b喜欢拍摄图像的情况下能够购买图像数据,在该情况下,能够在多个用户a、b的移动终端sp(智能手机)中下载图像数据。另外,还能够在存储介质中保存图像数据来向用户提供。
[0220]
另一方面,在步骤s520的判定中判定为没有拍摄到被设定的人数的量的用户的面部的情况下(s520为否),处理进入步骤s540。
[0221]
在步骤s540中,信号生成部220生成控制拍摄参数的参数控制信号。在没有拍摄到被设定的人数的量的用户的面部的情况下,为了能拍摄到被设定的人数的量的用户(全员)的面部,信号生成部220生成控制拍摄部200的拍摄参数的参数控制信号。信号生成部220能够生成使拍摄部200的视场角沿水平方向移动的参数控制信号作为pan控制用的拍摄参数,或者生成使拍摄部200的视场角沿垂直方向移动的参数控制信号作为tilt控制用的拍摄参数。并且,还能够生成使视场角放大(zoom up)或者缩小(zoom out)来拍摄的参数控制信号。
[0222]
在步骤s550中,通信控制部230向无人机drn发送由信号生成部220生成的参数控制信号。当接收到参数控制信号时,无人机drn的拍摄控制部203根据参数控制信号来控制拍摄部200,一边由无人机drn进行移动一边进行拍摄。通过根据参数控制信号控制拍摄部200的视场角,能够拍摄组全员的面部。
[0223]
在步骤s560中,信号生成部220生成引导重新进行拍摄的拍摄引导信号。在根据图像判定部250的判定,没有拍摄到被设定的人数的量的用户a、b的面部的情况下,信号生成部220生成引导用户a、b重新进行拍摄的拍摄引导信号。
[0224]
然后,在步骤s570中,通信控制部230向多台车辆1a、1b发送拍摄引导信号。当接收到拍摄引导信号时,各车辆的显示装置17向用户示出基于拍摄引导信号的显示,引导再次拍摄。由此,即使在无法拍摄到用户全员的面部的情况下,通过生成拍摄引导信号,并向多台车辆发送拍摄引导信号,也能够在拍摄区域中立即进行重新拍摄。
[0225]
在步骤s570之后,处理返回步骤s500,以后反复执行同样的处理。
[0226]
(与逆光判定有关的追加处理)
[0227]
另外,在步骤s570之后,还能够进行与逆光判定有关的追加处理。逆光判定部260根据由拍摄部200拍摄到的图像数据,判定拍摄状态是否为逆光。例如,当在由拍摄部200拍摄到的图像数据中包含像素值局部超过基准像素值的区域时,逆光判定部260判定为是以逆光的拍摄状态拍摄到的图像。
[0228]
在判定为拍摄状态为逆光的情况下,信号生成部220生成指示变更无人机drn的飞行位置以避免逆光的飞行控制信号。例如,信号生成部220生成指示无人机drn盘旋的飞行控制信号,以使太阳不会进入拍摄部的视野角的范围内。
[0229]
通信控制部230向无人机drn发送飞行控制信号。当接收到飞行控制信号时,无人机的飞行控制部207根据飞行控制信号来变更飞行位置。
[0230]
另外,在判定为拍摄状态是逆光的情况下,信号生成部220还能生成控制信号(参数控制信号),以进行使拍摄部200的视场角沿水平方向移动的控制(pan控制)、或者使拍摄部200的视场角沿垂直方向移动的控制(tilt控制)。
[0231]
通信控制部230向无人机drn发送参数控制信号。当接收到参数控制信号时,无人机drn的拍摄控制部203根据参数控制信号来变更拍摄部200的视场角。
[0232]
在根据拍摄到的图像数据判定为是逆光的拍摄状态的情况下,能够通过变更无人机的飞行位置或者变更拍摄部200的视场角来以避免逆光的状态进行拍摄。
[0233]
(多台车辆的车距的调整处理)
[0234]
控制装置cnt检查多台车辆1a、1b在拍摄区域或者设定在拍摄区域的近前的规定的准备区域中行驶时的车距,向多台车辆发送告知信息以成为适合拍摄的车距(处于规定的基准距离范围内的距离)。
[0235]
例如,在车辆间的车距超过规定的基准距离范围的上限距离的情况下,向多台车辆1a、1b发送距离告知信号来告知各车辆的用户,其中所述距离告知信号是用于告知车距过于拉开的信号。
[0236]
另外,在车辆间的车距在规定的基准距离范围的下限距离以下的情况下,向多台车辆1a、1b发送靠近告知信号来向各车辆的用户进行告知,其中所述靠近告知信号是用于告知车距过于靠近的信号。
[0237]
图6是说明多台车辆的车距的调整处理的流程的图。在步骤s600中,判定部210获取在拍摄区域或者设定在拍摄区域的近前的规定的准备区域中行驶的多台车辆1a、1b的位置信息。在步骤s610中,判定部210根据位置信息获取多台车辆1a、1b的车距。例如,判定部210能够根据位置信息的差量来获取车距。
[0238]
在步骤s620中判定部210判定为获取到的车距超过规定的基准距离范围的上限距离的情况下(s620为是),使处理进入步骤s630。
[0239]
在步骤s630中,信号生成部220生成向用户告知车距超过基准距离范围的上限距离的距离告知信号。然后,在步骤s640中,通信控制部230向多台车辆1a、1b发送距离告知信号。在车距过于拉开的情况下,在拍摄区域中行驶时可能无法同时拍摄到多个用户,因此,能够通过向多台车辆发送告知车距超过基准距离范围的上限距离的距离告知信号向用户进行告知,来催促缩小车距。
[0240]
另外,在步骤s620的判定中判定为获取到的车距没有超过规定的基准距离范围的
上限距离的情况下(s620为否),判定部210使处理进入步骤s650。
[0241]
在步骤s650中判定部210判定为获取到的车距不在基准距离范围的下限距离以下的情况下(s650为否),判定部210使处理返回步骤s600,反复执行同样的处理。在该情况下,多台车辆1a、1b的车距是适合拍摄的车距(处于规定的基准距离范围内的距离),无需生成告知信号(距离告知信号、靠近告知信号)而继续执行车距的检查处理。
[0242]
另一方面,在步骤s650的判定中判定为获取到的车距在规定的基准距离范围的下限距离以下的情况下(s650为是),判定部210使处理进入步骤s660。
[0243]
在步骤s660中,信号生成部220生成向用户告知车距在基准距离范围的下限距离以下的靠近告知信号。
[0244]
然后,在步骤s670中,通信控制部230向多台车辆发送靠近告知信号。在车距过于靠近的情况下,当在拍摄区域中行驶时多个用户重叠,可能无法同时进行拍摄,因此,能够通过向多台车辆发送告知车距在基准距离范围的下限距离以下的靠近告知信号来用户进行告知,以催促拉大车距。
[0245]
(多台车辆的速度差的调整处理)
[0246]
控制装置cnt检查多台车辆1a、1b在拍摄区域或者设定在拍摄区域的近前的规定的准备区域中行驶时的车辆间的速度差,向多台车辆发送速度告知信号以成为适合拍摄的速度差(规定的基准速度以下)。
[0247]
图7是说明多台车辆的速度差的调整处理的流程的图。在步骤s700中,判定部210获取在拍摄区域或者设定在拍摄区域的近前的规定的准备区域中行驶的多台车辆1a、1b的速度信息。在步骤s710中,判定部210根据多台车辆1a、1b的速度信息来获取多台车辆1a、1b的速度差。例如,判定部210能够根据速度信息的差量来获取车辆间的速度差。
[0248]
在步骤s720中判定为获取到的速度差没有超过基准速度的情况下(s720为否),判定部210使处理返回步骤s700,反复执行同样的处理。在该情况下,多台车辆1a、1b的速度差是适合拍摄的速度差(规定的基准速度以下),无需生成速度告知信号而继续执行速度差的检查处理。
[0249]
另一方面,在步骤s720的判定中判定为速度差超过规定的基准速度的情况下(s720为是),判定部210使处理进入步骤s730。
[0250]
在步骤s730中,信号生成部220生成速度告知信号,该速度告知信号是用于向用户告知速度差超过基准速度的信号。
[0251]
然后,在步骤s740中,通信控制部230向多台车辆1a、1b发送速度告知信号。
[0252]
在速度差超过基准速度的情况下,当在拍摄区域中行驶时可能无法同时拍摄到多个用户,因此,能够通过向多台车辆发送告知速度差超过基准速度的速度告知信号向用户进行告知,来催促缩小速度差。
[0253]
[第2实施方式]
[0254]
在之前说明的第1实施方式中,将构成被拍摄体的多台车辆的用户作为拍摄对象的组进行说明,但被拍摄体的结构并不限定于该例子,例如,也可以是行人或者单独的车辆的用户。在第2实施方式中,对将行人或者单独的车辆的用户作为拍摄对象的结构进行说明。拍摄系统stm的结构以及车辆、控制装置cnt、无人机drn的功能结构与图1、图2相同,下面,对与第1实施方式不同的部分进行说明。
[0255]
在第2实施方式中,控制装置cnt的存储部22登记将构成被拍摄体的单独的或者多个行人或单独的车辆的用户设定为拍摄对象的用户信息,作为被拍摄体信息。在此,在被拍摄体信息中包括用户的终端信息和用户使用的车辆的车辆信息。在被拍摄体是行人的情况下,在被拍摄体信息中,将行人的终端信息作为被拍摄体信息登记在存储部22中。
[0256]
判定部210根据通过与被拍摄体的终端(例如,图1的sp)进行通信而获取到的被拍摄体的位置信息和地图信息,判定被拍摄体是否位于规定的拍摄区域。即,判定部210根据被拍摄体的位置信息和地图信息,判定被拍摄体是否已进入规定的拍摄区域(图3)。在判定部210判定为被设定为拍摄对象的被拍摄体已进入拍摄区域的情况下,信号生成部220生成指示开始拍摄的控制信号,通信控制部230向无人机drn发送通过信号生成部220生成的控制信号和被拍摄体信息。
[0257]
无人机drn的确定部202根据从被拍摄体的终端发布的被拍摄体信息和从通信控制部230发送的被拍摄体信息,确定被拍摄体,无人机drn的拍摄控制部203根据控制信号控制拍摄部200,开始被拍摄体的拍摄。
[0258]
另外,在判定部210判定为被拍摄体已进入拍摄区域或者设定在拍摄区域的近前的规定的准备区域的情况下,信号生成部220生成向被拍摄体告知已进入拍摄区域或者准备区域的区域告知信号,通信控制部230向被拍摄体发送区域告知信号。
[0259]
另外,作为功能结构,控制装置cnt具备:图像处理部240,其进行从由拍摄部件拍摄到的图像数据中提取被拍摄体的面部的图像处理;以及图像判定部260,其根据图像处理的结果判定是否拍摄到被拍摄体的面部。
[0260]
在根据图像判定部260的判定,没有拍摄到被拍摄体的面部的情况下,为了能够拍摄到被拍摄体的面部,信号生成部220生成控制拍摄部200的拍摄参数的参数控制信号,通信制部230向无人机drn发送生成的参数控制信号。
[0261]
无人机drn的拍摄控制部203根据参数控制信号控制拍摄部200来进行被拍摄体的拍摄。另外,在根据图像判定部的判定,没有拍摄到被拍摄体的面部的情况下,信号生成部220生成引导被拍摄体重新进行拍摄的拍摄引导信号,通信控制部230向被拍摄体的终端发送拍摄引导信号。当接收到拍摄引导信号时,被拍摄体的终端向用户示出基于拍摄引导信号的显示,引导再次进行拍摄。
[0262]
另外,在被拍摄体是单独的车辆的用户的情况下,通信控制部230还能够向作为被拍摄体的用户的车辆发送拍摄引导信号。当接收到拍摄引导信号时,车辆的显示装置17向用户示出基于拍摄引导信号的显示,引导再次拍摄。由此,即使在无法拍摄到用户的面部的情况下,通过生成拍摄引导信号且向车辆发送拍摄引导信号,也能够在拍摄区域中立即进行重新拍摄。
[0263]
《实施方式的总结》
[0264]
上述实施方式至少公开以下的结构。
[0265]
结构1.上述实施方式的拍摄系统是一种拍摄系统(例如,图1中的stm),具有:无人机(例如,图1中的drn),其具有能够在飞行状下拍摄被拍摄体的拍摄部件(例如,图1中的200);以及控制装置(例如,图1中的cnt),其能够与所述被拍摄体的终端(例如,图1中的sp)及所述无人机进行通信,
[0266]
所述控制装置(cnt)具备:
[0267]
存储部件(例如,图1中的22),其登记将所述被拍摄体设定为拍摄对象的被拍摄体信息;
[0268]
判定部件(例如,图2中的210),其根据通过与所述终端进行通信而获取到的该被拍摄体的位置信息和地图信息,判定该被拍摄体是否位于规定的拍摄区域;
[0269]
信号生成部件(例如,图2中的220),其生成根据所述判定部件的判定来控制所述拍摄部件的控制信号;以及
[0270]
通信控制部件(例如,图2中的230),其向所述无人机发送所述被拍摄体信息和所述控制信号,
[0271]
所述无人机(drn)具备:
[0272]
确定部件(例如,图2中的202),其根据由所述被拍摄体的终端发布的被拍摄体信息和由所述通信控制部件发送的所述被拍摄体信息,来确定所述被拍摄体;以及
[0273]
拍摄控制部件(例如,图2中的203),其根据所述控制信号控制所述拍摄部件,控制由所述确定部件确定的所述被拍摄体的拍摄。
[0274]
根据结构1的拍摄系统,能够提供一种能够通过无人机拍摄预先登记的被拍摄体的技术。
[0275]
结构2.在上述实施方式的拍摄系统中,所述存储部件登记组信息作为所述被拍摄体信息,其中所述组信息是指将构成所述被拍摄体的多台车辆的用户设定为拍摄对象的组的信息,
[0276]
所述判定部件根据所述被拍摄体的位置信息和地图信息来判定该被拍摄体是否正在规定的拍摄区域中行驶。
[0277]
根据结构2的拍摄系统,能够将预先登记为组的多台车辆的用户作为被拍摄体,通过无人机来拍摄正在借助车辆行驶的用户。即,根据结构1的拍摄系统,能够提供一种能够根据预先设定的组信息来通过无人机同时拍摄正在借助多台车辆行驶的用户,由此满足希望在组中同时进行拍摄的用户的需要的拍摄系统。
[0278]
结构3.在上述实施方式的拍摄系统中,所述判定部件(210)在判定为被设定为所述组的所述多台车辆中的至少一台车辆已进入所述拍摄区域的情况下,判定为所述多台车辆正在所述拍摄区域中行驶,
[0279]
所述信号生成部件(220)生成指示开始拍摄的控制信号,
[0280]
所述拍摄控制部件(230)根据该控制信号控制所述拍摄部件(200),来开始拍摄所述多台车辆(1a、1b)的组。
[0281]
根据结构3的拍摄系统,能够控制开始拍摄的时刻,即使在拍摄区域小或者组的车辆的车距拉大等情况下,也能够拍摄到最初进入拍摄区域的车辆。
[0282]
结构4.在上述实施方式的拍摄系统中,在所述判定部件(210)判定为所述多台车辆(1a、1b)中的至少一台车辆正在所述拍摄区域中行驶的情况下,
[0283]
所述信号生成部件(220)生成指示继续拍摄的控制信号,
[0284]
所述拍摄控制部件(230)根据该控制信号控制所述拍摄部件来使所述拍摄继续,
[0285]
在所述判定部件(210)判定为所述多台车辆全部驶出所述拍摄区域的情况下,
[0286]
所述信号生成部件(220)生成指示结束拍摄的控制信号,
[0287]
所述拍摄控制部件(230)根据该控制信号控制所述拍摄部件结束所述拍摄。
[0288]
根据结构4的拍摄系统,能够控制结束拍摄的时刻,由此能够无遗漏地拍摄被设定为组的多台车辆。
[0289]
结构5.在上述实施方式的拍摄系统中,所述判定部件(210)在判定为设定为所述组的所述多台车辆(1a、1b)全部已进入所述拍摄区域的情况下,判定为所述多台车辆(1a、1b)正在所述拍摄区域中行驶,
[0290]
所述信号生成部件(220)生成指示开始拍摄的控制信号,
[0291]
所述拍摄控制部件(230)根据该控制信号控制所述拍摄部件,开始拍摄所述多台车辆的组。
[0292]
根据结构5的拍摄系统,能够控制开始拍摄的时刻,能够在被设定为组的所有多台车辆均已进入拍摄区域的情况下进行拍摄,由此能够仅拍摄满足用户的需要的影像。
[0293]
结构6.在上述实施方式的拍摄系统中,在所述判定部件(210)判定为所述多台车辆(1a、1b)中的至少一台车辆已进入所述拍摄区域或者设定在所述拍摄区域的近前的规定的准备区域的情况下,
[0294]
所述信号生成部件(220)生成区域告知信号,该区域告知信号是用于向所述用户告知已进入该拍摄区域或者准备区域的信号,
[0295]
所述通信控制部件(230)向所述多台车辆发送所述区域告知信号。
[0296]
根据结构6的拍摄系统,通过在拍摄前向用户告知区域告知信号,能够进行将组中的车辆彼此的队列排列好等、准备好拍摄的行驶。
[0297]
结构7.在上述实施方式的拍摄系统中,所述控制装置(cnt)还具备:
[0298]
图像处理部件(例如,图2中的240),其进行从由所述拍摄部件拍摄到的图像数据中提取所述用户的面部的图像处理;以及
[0299]
图像判定部件(例如,图2中的250),其根据所述图像处理的结果和所述组信息,判定是否拍摄到被设定为所述组的人数的量的用户的面部,
[0300]
在没有拍摄到所述被设定的人数的量的用户的面部的情况下,为了能够拍摄到所述被设定的人数的量的用户的面部,所述信号生成部件(220)生成控制所述拍摄部件的拍摄参数的参数控制信号,
[0301]
所述无人机(drn)的所述拍摄控制部件(203)根据所述参数控制信号控制所述拍摄部件进行所述拍摄。
[0302]
根据结构7的拍摄系统,通过根据参数控制信号控制拍摄部,能够拍摄组全员的面部。
[0303]
结构8.在上述实施方式的拍摄系统中,根据所述图像判定部件(250)的判定,在没有拍摄到所述被设定的人数的量的用户的面部的情况下,
[0304]
所述信号生成部件(220)生成引导所述用户重新进行所述拍摄的拍摄引导信号,
[0305]
所述通信控制部件(230)向所述多台车辆(1a、1b)发送所述拍摄引导信号。
[0306]
根据结构8的拍摄系统,即使在无法拍摄到用户全员的面部的情况下,通过生成引导用户重新进行拍摄的拍摄引导信号,且向多台车辆发送拍摄引导信号,能够在拍摄区域中立即进行重新拍摄。
[0307]
结构9.在上述实施方式的拍摄系统中,所述判定部件(210)根据所述位置信息获取在所述拍摄区域或者设定在所述拍摄区域的近前的规定的准备区域中行驶的所述多台
车辆(1a、1b)的车距,在判定为所述车距超过规定的基准距离范围的上限距离的情况下,
[0308]
所述信号生成部件(220)生成距离告知信号,该距离告知信号是用于向所述用户告知所述车距超过所述基准距离范围的上限距离的信号,
[0309]
所述通信控制部件(230)向所述多台车辆(1a、1b)发送所述距离告知信号。
[0310]
根据结构9的拍摄系统,在车距过于拉开的情况下,当在拍摄区域中行驶时可能无法同时拍摄多个用户,因此,能够通过向多台车辆发送告知车距超过基准距离范围的上限距离的距离告知信号向用户进行告知,来催促缩小车距。
[0311]
结构10.在上述实施方式的拍摄系统中,所述判定部件(210)根据所述位置信息获取在所述拍摄区域或者设定在所述拍摄区域的近前的规定的准备区域中行驶的所述多台车辆(1a、1b)的车距,在判定为所述车距在规定的基准距离范围的下限距离以下的情况下,
[0312]
所述信号生成部件(220)生成靠近告知信号,该靠近告知信号是用于向所述用户告知所述车距在所述基准距离范围的下限距离以下的信号,
[0313]
所述通信控制部件(230)向所述多台车辆(1a、1b)发送所述靠近告知信号。
[0314]
根据结构10的拍摄系统,在车距过于靠近的情况下,当在拍摄区域中行驶时多个用户重叠,可能无法同时进行拍摄,因此,能够通过向多台车辆发送告知车距在基准距离范围的下限距离以下的靠近告知信号向用户进行告知,来催促拉大车距。
[0315]
结构11.在上述实施方式的拍摄系统中,所述多台车辆(1a、1b)具有:
[0316]
获取部件(例如,图1中的通信装置15和检测装置16),其获取车辆的位置信息;
[0317]
车辆通信部件(例如,图1中的通信装置15),其发送所述车辆的位置信息;以及
[0318]
检测部件(例如,图1中的16),其检测所述车辆的速度信息,
[0319]
所述车辆通信部件(15)向所述控制装置发送所述速度信息,
[0320]
所述控制装置(cnt)的所述判定部件(210)根据所述速度信息获取在所述拍摄区域或者设定在所述拍摄区域的近前的规定的准备区域中行驶的所述多台车辆(1a、1b)的速度差,在判定为所述速度差超过规定的基准速度的情况下,
[0321]
所述信号生成部件(220)生成速度告知信号,该速度告知信号是用于向所述用户告知所述速度差超过所述基准速度的信号,
[0322]
所述通信控制部件(230)向所述多台车辆发送所述速度告知信号。
[0323]
根据结构11的拍摄系统,在速度差超过基准速度的情况下,当在拍摄区域中行驶时可能无法同时拍摄到多个用户,因此,能够通过向多台车辆发送告知速度差超过基准速度的速度告知信号向用户进行告知,来催促缩小速度差。
[0324]
结构12.在上述实施方式的拍摄系统中,所述控制装置(cnt)还具备:
[0325]
逆光判定部件(例如,图2中的260),该逆光判定部件根据由所述拍摄部件拍摄到的图像数据来判定拍摄状态是否为逆光,
[0326]
在判定为所述拍摄状态是逆光的情况下,所述信号生成部件(220)生成指示变更所述无人机的飞行位置以避免所述逆光的飞行控制信号,
[0327]
所述通信控制部件(230)向所述无人机发送所述飞行控制信号,
[0328]
所述无人机(drn)的飞行控制部件(例如,图2中的207)根据所述飞行控制信号来变更所述飞行位置。
[0329]
根据结构12的拍摄系统,在根据拍摄到的图像数据判断为是逆光的拍摄状态的情
况下,能够通过变更无人机的飞行位置来以避免逆光的状态进行拍摄。
[0330]
结构13.在上述实施方式的拍摄系统中,在判定为所述拍摄状态是逆光的情况下,所述信号生成部件(220)生成参数控制信号,以进行使所述拍摄部件(200)的视场角沿水平方向移动的控制、或者使所述拍摄部件(200)的视场角沿垂直方向移动的控制,
[0331]
所述通信控制部件(230)向所述无人机发送所述参数控制信号,
[0332]
所述无人机(drn)的拍摄控制部件(203)根据所述参数控制信号来变更所述拍摄部件(200)的视场角。
[0333]
根据结构13的拍摄系统,在根据拍摄到的图像数据判断为是逆光的拍摄状态的情况下,能够通过变更拍摄部的视场角来以避免逆光的状态进行拍摄。
[0334]
结构14.在上述实施方式的拍摄系统中,所述存储部件(22)登记用户信息作为所述被拍摄体信息,其中所述用户信息是指将构成所述被拍摄体的行人或者单独的车辆的用户设定为拍摄对象的信息,
[0335]
所述判定部件(210)根据所述被拍摄体的位置信息和地图信息判定该被拍摄体是否已进入规定的拍摄区域。
[0336]
根据结构14的拍摄系统,能够提供将预先登记的行人或者单独的车辆的用户作为被拍摄体,通过无人机来拍摄行人或者单独的车辆的用户的技术。
[0337]
结构15.在上述实施方式的拍摄系统中,在所述判定部件(210)判定为被设定为所述拍摄对象的所述被拍摄体已进入所述拍摄区域的情况下,
[0338]
所述信号生成部件(220)生成指示开始拍摄的控制信号,
[0339]
所述拍摄控制部件(203)根据该控制信号控制所述拍摄部件(200),开始拍摄所述被拍摄体。
[0340]
根据结构15的拍摄系统,能够控制开始拍摄的时刻。由此,即使在拍摄区域小的情况下,也能够不错过拍摄的时刻地进行被拍摄体的拍摄。
[0341]
结构16.在上述实施方式的拍摄系统中,在所述判定部件(200)判定为所述被拍摄体已进入所述拍摄区域或者设定在所述拍摄区域的近前的规定的准备区域的情况下,
[0342]
所述信号生成部件(220)生成区域告知信号,该区域告知信号是用于向所述被拍摄体告知已进入该拍摄区域或者准备区域的信号,
[0343]
所述通信控制部件(230)向所述被拍摄体发送所述区域告知信号。
[0344]
根据结构16的拍摄系统,通过在拍摄前告知被拍摄体区域告知信号,被拍摄体能够进行拍摄的事前准备。
[0345]
结构17.在上述实施方式的拍摄系统中,所述控制装置(cnt)还具备:
[0346]
图像处理部件(例如,图2中的240),其进行从由所述拍摄部件(200)拍摄到的图像数据中提取所述被拍摄体的面部的图像处理;以及
[0347]
图像判定部件(例如,图2中的250),其根据所述图像处理的结果判定是否拍摄到所述被拍摄体的面部,
[0348]
在没有拍摄到所述被拍摄体的面部的情况下,为了能够拍摄到所述被拍摄体的面部,所述信号生成部件(220)生成控制所述拍摄部件(200)的拍摄参数的参数控制信号,
[0349]
所述无人机(drn)的所述拍摄控制部件(203)根据所述参数控制信号控制所述拍摄部件(200)进行所述拍摄。
[0350]
根据结构17的拍摄系统,通过根据参数控制信号控制拍摄部,能够拍摄到被拍摄体的面部。
[0351]
结构18.在上述实施方式的拍摄系统中,根据所述图像判定部件(250)的判定,在没有拍摄到所述被拍摄体的面部的情况下,
[0352]
所述信号生成部件(220)生成引导所述被拍摄体重新进行所述拍摄的拍摄引导信号,
[0353]
所述通信控制部件(230)向所述被拍摄体发送所述拍摄引导信号。
[0354]
根据结构18的拍摄系统,即使在无法拍摄到被拍摄体的面部的情况下,通过生成引导被拍摄体重新进行拍摄的拍摄引导信号,且向被拍摄体的终端发送拍摄引导信号,能够在拍摄区域中立即重新进行拍摄。
[0355]
结构19.上述实施方式的控制装置是一种控制装置(例如,图1中的cnt),其能够与无人机(例如,图1中的drn)进行通信,该无人机具有能够以飞行状态拍摄被拍摄体的拍摄部件(例如,图2中的200),具有:
[0356]
存储部件(例如,图1中的22),其登记将所述被拍摄体设定为拍摄对象的被拍摄体信息;
[0357]
判定部件(例如,图2中的210),其根据所述被拍摄体的位置信息和地图信息来判定该被拍摄体是否位于规定的拍摄区域;
[0358]
信号生成部件(例如,图2中的220),其生成根据所述判定部件的判定控制所述拍摄部件的控制信号;以及
[0359]
通信控制部件(例如,图2中的230),其向所述无人机发送所述被拍摄体信息和所述控制信号。
[0360]
结构20.上述实施方式的控制方法是控制装置中的控制方法,所述控制装置能够与无人机进行通信,该无人机具有能够以飞行状态拍摄被拍摄体的拍摄部件,具有:
[0361]
存储工序(例如,图4中的s400),将被拍摄体信息登记在存储部件(22)中,其中所述被拍摄体信息是将所述被拍摄体设定为拍摄对象的信息;
[0362]
判定工序(例如,图4中的s415),判定部件(210)根据所述被拍摄体的位置信息和地图信息,判定该被拍摄体是否位于规定的拍摄区域中;
[0363]
信号生成工序(例如,图4中的s420),信号生成部件(220)生成根据所述判定工序中的判定控制所述拍摄部件的控制信号;以及
[0364]
通信控制工序(例如,图4中的s425),通信控制部件(230)向所述无人机发送所述被拍摄体信息和所述控制信号。
[0365]
结构21.上述实施方式的程序使计算机执行控制装置中的控制方法的各工序,所述控制装置能够与无人机进行通信,该无人机具有能够以飞行状态拍摄被拍摄体的拍摄部件,该控制方法具有:
[0366]
存储工序(例如,图4中的s400),将被拍摄体信息登记在存储部件(22)中,其中所述被拍摄体信息是将所述被拍摄体设定为拍摄对象的信息;
[0367]
判定工序(例如,图4中的s415),判定部件(210)根据所述被拍摄体的位置信息和地图信息,判定该被拍摄体是否位于规定的拍摄区域中;
[0368]
信号生成工序(例如,图4中的s420),信号生成部件(220)生成根据所述判定工序
中的判定控制所述拍摄部件的控制信号;以及
[0369]
通信控制工序(例如,图4中的s425),通信控制部件(230)向所述无人机发送所述被拍摄体信息和所述控制信号。
[0370]
结构22.上述实施方式的存储介质是一种计算机可读的存储介质,该计算机可读的存储介质存储有使计算机执行控制装置中的控制方法的各工序的程序,所述控制装置能够与无人机进行通信,该无人机具有能够以飞行状态拍摄被拍摄体的拍摄部件,该控制方法具有:
[0371]
存储工序(例如,图4中的s400),将被拍摄体信息登记在存储部件(22)中,其中所述被拍摄体信息是将所述被拍摄体设定为拍摄对象的信息;
[0372]
判定工序(例如,图4中的s415),判定部件(210)根据所述被拍摄体的位置信息和地图信息,判定该被拍摄体是否位于规定的拍摄区域中;
[0373]
信号生成工序(例如,图4中的s420),信号生成部件(220)生成根据所述判定工序中的判定控制所述拍摄部件的控制信号;以及
[0374]
通信控制工序(例如,图4中的s425),通信控制部件(230)向所述无人机发送所述被拍摄体信息和所述控制信号。
[0375]
根据结构19的控制装置、结构20的控制方法、结构21的程序以及结构22的存储介质,能够提供一种用于通过无人机来拍摄预先登记的被拍摄体的控制技术。
[0376]
发明并不限定于上述的实施方式,在没有脱离发明的主旨的范围内能够进行各种变形、变更。
[0377]
本技术基于2019年9月27日提出的日本专利申请特愿2019-177692而提出,并要求该日本专利申请的优先权,该日本专利申请的全部内容在此引入本技术作为参考。
[0378]
附图标记说明
[0379]
1a、1b:车辆;drn:无人机;200:拍摄部;201:通信接口部(通信i/f);202:确定部;203:拍摄控制部;207:飞行控制部;cnt:控制装置(控制服务器);210:判定部;220:信号生成部;230:通信控制部;240:图像处理部;250:图像判定部;260:逆光判定部。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。