技术特征:
1.一种拍摄系统,该拍摄系统具有:无人机,其具有能够在飞行状下拍摄被拍摄体的拍摄部件;以及控制装置,其能够与所述被拍摄体的终端及所述无人机进行通信,其特征在于,所述控制装置具备:存储部件,其登记将所述被拍摄体设定为拍摄对象的被拍摄体信息;判定部件,其根据通过与所述终端进行通信而获取到的该被拍摄体的位置信息和地图信息,判定该被拍摄体是否位于规定的拍摄区域;信号生成部件,其生成根据所述判定部件的判定来控制所述拍摄部件的控制信号;以及通信控制部件,其向所述无人机发送所述被拍摄体信息和所述控制信号,所述无人机具备:确定部件,其根据由所述被拍摄体的终端发布的被拍摄体信息和由所述通信控制部件发送的所述被拍摄体信息,来确定所述被拍摄体;以及拍摄控制部件,其根据所述控制信号控制所述拍摄部件,控制由所述确定部件确定的所述被拍摄体的拍摄。2.根据权利要求1所述的拍摄系统,其特征在于,所述存储部件登记组信息作为所述被拍摄体信息,其中所述组信息是指将构成所述被拍摄体的多台车辆的用户设定为拍摄对象的组的信息,所述判定部件根据所述被拍摄体的位置信息和地图信息来判定该被拍摄体是否正在规定的拍摄区域中行驶。3.根据权利要求2所述的拍摄系统,其特征在于,所述判定部件在判定为被设定为所述组的所述多台车辆中的至少一台车辆已进入所述拍摄区域的情况下,判定为所述多台车辆正在所述拍摄区域中行驶,所述信号生成部件生成指示开始拍摄的控制信号,所述拍摄控制部件根据该控制信号控制所述拍摄部件,来开始拍摄所述多台车辆的组。4.根据权利要求3所述的拍摄系统,其特征在于,在所述判定部件判定为所述多台车辆中的至少一台车辆正在所述拍摄区域中行驶的情况下,所述信号生成部件生成指示继续拍摄的控制信号,所述拍摄控制部件根据该控制信号控制所述拍摄部件使所述拍摄继续,在所述判定部件判定为所述多台车辆全部驶出所述拍摄区域的情况下,所述信号生成部件生成指示结束拍摄的控制信号,所述拍摄控制部件根据该控制信号控制所述拍摄部件结束所述拍摄。5.根据权利要求2所述的拍摄系统,其特征在于,所述判定部件在判定为被设定为所述组的所述多台车辆全部已进入所述拍摄区域的情况下,判定为所述多台车辆正在所述拍摄区域中行驶,所述信号生成部件生成指示开始拍摄的控制信号,所述拍摄控制部件根据该控制信号控制所述拍摄部件,开始拍摄所述多台车辆的组。
6.根据权利要求2至5中任一项所述的拍摄系统,其特征在于,在所述判定部件判定为所述多台车辆中的至少一台车辆已进入所述拍摄区域或者设定在所述拍摄区域的近前的规定的准备区域的情况下,所述信号生成部件生成区域告知信号,该区域告知信号是用于向所述用户告知已进入该拍摄区域或者准备区域的信号,所述通信控制部件向所述多台车辆发送所述区域告知信号。7.根据权利要求2至6中任一项所述的拍摄系统,其特征在于,所述控制装置还具备:图像处理部件,其进行从由所述拍摄部件拍摄到的图像数据中提取所述用户的面部的图像处理;以及图像判定部件,其根据所述图像处理的结果和所述组信息,判定是否拍摄到被设定为所述组的人数的量的用户的面部,在没有拍摄到所述被设定的人数的量的用户的面部的情况下,为了能够拍摄到所述被设定的人数的量的用户的面部,所述信号生成部件生成控制所述拍摄部件的拍摄参数的参数控制信号,所述无人机的所述拍摄控制部件根据所述参数控制信号控制所述拍摄部件进行所述拍摄。8.根据权利要求7所述的拍摄系统,其特征在于,根据所述图像判定部件的判定,在没有拍摄到所述被设定的人数的量的用户的面部的情况下,所述信号生成部件生成引导所述用户重新进行所述拍摄的拍摄引导信号,所述通信控制部件向所述多台车辆发送所述拍摄引导信号。9.根据权利要求2至8中任一项所述的拍摄系统,其特征在于,所述判定部件根据所述位置信息获取在所述拍摄区域或者设定在所述拍摄区域的近前的规定的准备区域中行驶的所述多台车辆的车距,在判定为所述车距超过规定的基准距离范围的上限距离的情况下,所述信号生成部件生成距离告知信号,该距离告知信号是用于向所述用户告知所述车距超过所述基准距离范围的上限距离的信号,所述通信控制部件向所述多台车辆发送所述距离告知信号。10.根据权利要求2至8中任一项所述的拍摄系统,其特征在于,所述判定部件根据所述位置信息获取在所述拍摄区域或者设定在所述拍摄区域的近前的规定的准备区域中行驶的所述多台车辆的车距,在判定为所述车距在规定的基准距离范围的下限距离以下的情况下,所述信号生成部件生成靠近告知信号,该靠近告知信号是用于向所述用户告知所述车距在所述基准距离范围的下限距离以下的信号,所述通信控制部件向所述多台车辆发送所述靠近告知信号。11.根据权利要求2至10中任一项所述的拍摄系统,其特征在于,所述多台车辆具备:获取部件,其获取车辆的位置信息;
车辆通信部件,其发送所述车辆的位置信息;以及检测部件,其检测所述车辆的速度信息,所述车辆通信部件向所述控制装置发送所述速度信息,所述控制装置的所述判定部件根据所述速度信息获取在所述拍摄区域或者设定在所述拍摄区域的近前的规定的准备区域中行驶的所述多台车辆的速度差,在判定为所述速度差超过规定的基准速度的情况下,所述信号生成部件生成速度告知信号,该速度告知信号是用于向所述用户告知所述速度差超过所述基准速度的信号,所述通信控制部件向所述多台车辆发送所述速度告知信号。12.根据权利要求2至11中任一项所述的拍摄系统,其特征在于,所述控制装置还具备逆光判定部件,该逆光判定部件根据由所述拍摄部件拍摄到的图像数据来判定拍摄状态是否为逆光,在判定为所述拍摄状态是逆光的情况下,所述信号生成部件生成指示变更所述无人机的飞行位置以避免所述逆光的飞行控制信号,所述通信控制部件向所述无人机发送所述飞行控制信号,所述无人机的飞行控制部件根据所述飞行控制信号来变更所述飞行位置。13.根据权利要求12所述的拍摄系统,其特征在于,在判定为所述拍摄状态是逆光的情况下,所述信号生成部件生成参数控制信号,以进行使所述拍摄部件的视场角沿水平方向移动的控制、或者使所述拍摄部件的视场角沿垂直方向移动的控制,所述通信控制部件向所述无人机发送所述参数控制信号,所述无人机的拍摄控制部件根据所述参数控制信号来变更所述拍摄部件的视场角。14.根据权利要求1所述的拍摄系统,其特征在于,所述存储部件登记用户信息作为所述被拍摄体信息,其中所述用户信息是指将构成所述被拍摄体的行人或者单独的车辆的用户设定为拍摄对象的信息,所述判定部件根据所述被拍摄体的位置信息和地图信息判定该被拍摄体是否已进入规定的拍摄区域。15.根据权利要求14所述的拍摄系统,其特征在于,在所述判定部件判定为被设定为所述拍摄对象的所述被拍摄体已进入所述拍摄区域的情况下,所述信号生成部件生成指示开始拍摄的控制信号,所述拍摄控制部件根据该控制信号控制所述拍摄部件,开始拍摄所述被拍摄体。16.根据权利要求14或15所述的拍摄系统,其特征在于,在所述判定部件判定为所述被拍摄体已进入所述拍摄区域或者设定在所述拍摄区域的近前的规定的准备区域的情况下,所述信号生成部件生成区域告知信号,该区域告知信号是用于向所述被拍摄体告知已进入该拍摄区域或者准备区域的信号,所述通信控制部件向所述被拍摄体发送所述区域告知信号。17.根据权利要求14至16中任一项所述的拍摄系统,其特征在于,
所述控制装置还具备:图像处理部件,其进行从由所述拍摄部件拍摄到的图像数据中提取所述被拍摄体的面部的图像处理;以及图像判定部件,其根据所述图像处理的结果判定是否拍摄到所述被拍摄体的面部,在没有拍摄到所述被拍摄体的面部的情况下,为了能够拍摄到所述被拍摄体的面部,所述信号生成部件生成控制所述拍摄部件的拍摄参数的参数控制信号,所述无人机的所述拍摄控制部件根据所述参数控制信号控制所述拍摄部件进行所述拍摄。18.根据权利要求17所述的拍摄系统,其特征在于,根据所述图像判定部件的判定,在没有拍摄到所述被拍摄体的面部的情况下,所述信号生成部件生成引导所述被拍摄体重新进行所述拍摄的拍摄引导信号,所述通信控制部件向所述被拍摄体发送所述拍摄引导信号。19.一种控制装置,其能够与无人机进行通信,该无人机具有能够以飞行状态拍摄被拍摄体的拍摄部件,其特征在于,具备:存储部件,其登记将所述被拍摄体设定为拍摄对象的被拍摄体信息;判定部件,其根据所述被拍摄体的位置信息和地图信息来判定该被拍摄体是否位于规定的拍摄区域;信号生成部件,其生成根据所述判定部件的判定来控制所述拍摄部件的控制信号;以及通信控制部件,其向所述无人机发送所述被拍摄体信息和所述控制信号。20.一种控制装置中的控制方法,所述控制装置能够与无人机进行通信,该无人机具有能够以飞行状态拍摄被拍摄体的拍摄部件,其特征在于,具有:存储工序,将被拍摄体信息登记在存储部件中,其中所述被拍摄体信息是将所述被拍摄体设定为拍摄对象的信息;判定工序,判定部件根据所述被拍摄体的位置信息和地图信息,判定该被拍摄体是否位于规定的拍摄区域中;信号生成工序,信号生成部件生成根据所述判定工序中的判定控制所述拍摄部件的控制信号;以及通信控制工序,通信控制部件向所述无人机发送所述被拍摄体信息和所述控制信号。21.一种程序,该程序使计算机执行控制装置中的控制方法的各工序,所述控制装置能够与无人机进行通信,该无人机具有能够以飞行状态拍摄被拍摄体的拍摄部件,其特征在于,该控制方法具有:存储工序,将被拍摄体信息登记在存储部件中,其中所述被拍摄体信息是将所述被拍摄体设定为拍摄对象的信息;判定工序,判定部件根据所述被拍摄体的位置信息和地图信息,判定该被拍摄体是否位于规定的拍摄区域中;信号生成工序,信号生成部件生成根据所述判定工序中的判定控制所述拍摄部件的控制信号;以及
通信控制工序,通信控制部件向所述无人机发送所述被拍摄体信息和所述控制信号。22.一种计算机可读的存储介质,该计算机可读的存储介质存储有使计算机执行控制装置中的控制方法的各工序的程序,所述控制装置能够与无人机进行通信,该无人机具有能够以飞行状态拍摄被拍摄体的拍摄部件,其特征在于,该控制方法具有:存储工序,将被拍摄体信息登记在存储部件中,其中所述被拍摄体信息是将所述被拍摄体设定为拍摄对象的信息;判定工序,判定部件根据所述被拍摄体的位置信息和地图信息,判定该被拍摄体是否位于规定的拍摄区域中;信号生成工序,信号生成部件生成根据所述判定工序中的判定控制所述拍摄部件的控制信号;以及通信控制工序,通信控制部件向所述无人机发送所述被拍摄体信息和所述控制信号。
技术总结
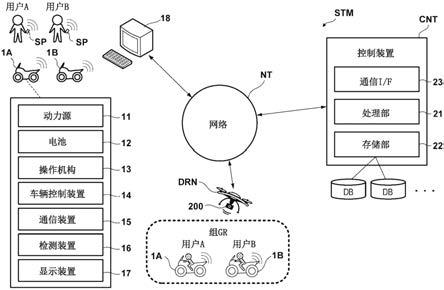
拍摄系统具有:无人机,其具有拍摄部;以及控制装置,其能够与被拍摄体的终端及无人机进行通信。控制装置具备:存储部,其登记将被拍摄体设定为拍摄对象的被拍摄体信息;判定部,其根据通过与被拍摄体的终端进行通信而获取到的该被拍摄体的位置信息和地图信息,判定该被拍摄体是否位于规定的拍摄区域;信号生成部,其生成根据判定部的判定来控制拍摄部的控制信号;以及通信控制部,其向无人机发送被拍摄体信息和控制信号。无人机具备:确定部,其根据由被拍摄体的终端发布的被拍摄体信息和由通信控制部发送的被拍摄体信息,来确定被拍摄体;以及拍摄控制部件,其根据控制信号控制所述拍摄部,控制由确定部确定的被拍摄体的拍摄。摄。摄。
技术研发人员:藤原崇雄 三川诚 大久保克幸 吉田博昭 中内洪太 渡边成章 藤津瞬
受保护的技术使用者:本田技研工业株式会社
技术研发日:2020.09.16
技术公布日:2022/4/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。