1.本技术涉及无人机技术领域,特别涉及一种无人机。
背景技术:
2.目前,无人机设计中,主要考虑了无人机的各部件的外观、结构特性、以及可生产特性,而未考虑无人机的各个部件的气动特性。在整机前飞过程中,无人机上的部件会产生较大的阻力,该阻力会为给整机水平前飞带来飞行负担。
技术实现要素:
3.本技术的实施方式提供一种无人机。
4.本技术实施方式的无人机包括电机和电机座。电机座包括基座和凸出部,基座用于安装电机,凸出部从基座延伸凸出,在无人机的飞行状态下,凸出部朝向无人机的后侧方渐缩延伸。
5.在某些实施方式中,所述凸出部的表面为曲面。
6.在某些实施方式中,所述无人机还包括第一指示灯,所述第一指示灯安装于所述凸出部并从所述无人机的后侧方露出。
7.在某些实施方式中,所述无人机还包括机臂,所述电机座安装于所述机臂,所述第一指示灯的朝向与所述机臂的延伸方向交叉。
8.在某些实施方式中,所述电机座在所述无人机的偏航轴的法平面内的投影轮廓呈水滴形或纺锤形。
9.在某些实施方式中,所述基座包括第一面,所述基座在第一面开设有收容腔,所述电机部分收容在所述收容腔内;所述电机座还包括延伸部,所述延伸部自所述凸出部朝所述基座的第一面所在的一侧延伸,所述延伸部包围所述电机的至少部分区域。
10.在某些实施方式中,所述电机座在所述无人机的偏航轴的法平面内的投影轮廓包括弧形的收容段及与所述收容段连接的整流段,沿远离所述收容段的方向,所述整流段渐缩。
11.在某些实施方式中,所述基座在所述平面内的投影轮廓的一部分对应所述收容段,至少部分所述延伸部在所述平面内的投影轮廓对应所述整流段。
12.在某些实施方式中,所述延伸部在所述平面内的投影轮廓呈梯形。
13.在某些实施方式中,所述基座包括第二面,所述第二面与所述基座的第一面连接并远离所述延伸部,所述第二面为弧面,所述基座的第二面的轮廓的后缘点的当地切线与所述平面之间的夹角α与所述无人机在巡航时机身的倾角β之间的差值在第一预定范围内。
14.在某些实施方式中,所述基座包括第二面,所述第二面与所述基座的第一面连接并远离所述延伸部,所述第二面为弧面,所述基座的第二面的轮廓的最高点的切线与所述平面之间的夹角θ的取值范围为[30
°
,35
°
]。
[0015]
在某些实施方式中,所述延伸部包括第一面和第二面,所述延伸部的第一面包围
所述电机的至少部分区域,所述延伸部的第二面与所述延伸部的第一面相接,所述延伸部的第二面的轮廓的最高点的切线与所述平面之间的夹角γ与所述无人机在巡航时机身的倾角β之间的差值在第二预定范围内。
[0016]
在某些实施方式中,所述延伸部包括第一面和第二面,所述延伸部的第一面包围所述电机的至少部分区域,所述延伸部的第二面与所述延伸部的第一面相接,所述延伸部的第二面的轮廓的最高点的切线与所述平面之间的夹角的取值范围为[30
°
,40
°
]。
[0017]
在某些实施方式中,所述无人机在所述平面内的投影轮廓还包括导流段,所述导流段与所述整流段分别位于所述收容段的两侧,沿远离所述收容段的方向,所述导流段渐缩。
[0018]
在某些实施方式中,所述基座包括导流部及整流部,至少部分所述导流部在所述平面内的投影轮廓对应所述导流段,至少部分所述整流部在所述平面内的投影轮廓对应所述收容段,所述凸出部对应所述整流段。
[0019]
在某些实施方式中,所述整流段呈梯形,所述导流段呈三角形。
[0020]
在某些实施方式中,所述整流部的外轮廓的最高点的切线与所述平面之间的夹角与所述无人机在巡航时机身的倾角相同。
[0021]
在某些实施方式中,所述整流部的外轮廓的最高点的切线与所述平面之间的夹角φ的取值范围为[30
°
,40
°
]。
[0022]
在某些实施方式中,所述机臂包括用于与所述无人机的机身连接的根部及与所述根部相对的稍部,沿所述根部至所述稍部方向上,所述机臂的多个翼型的安装角逐渐增大,所述安装角为所述机臂的翼型的弦长与所述无人机的偏航轴的法平面之间的夹角。
[0023]
在某些实施方式中,每个所述翼型的最大厚度为所述翼型的弦长的47.7%。
[0024]
在某些实施方式中,所述翼型呈纺锤形。
[0025]
在某些实施方式中,所述机臂在所述无人机的偏航轴的法平面上投影呈梯形,所述梯形对应所述根部的边长大于所述梯形对应所述稍部的边长。
[0026]
在某些实施方式中,所述电机座设于所述稍部并具有与所述电机转轴重合的安装中心,所述机身具有对称面,所述安装中心到所述对称面具有一参考距离,在沿着所述根部到所述稍部的方向上,所述翼型的弦长与所述安装角呈负相关。
[0027]
在某些实施方式中,在距离所述对称面为所述参考距离的29.2%处,所述翼型的安装角为33.24
°±
2.5
°
。
[0028]
在某些实施方式中,所述参考距离为105.99mm
±
10.60mm,在距离所述对称面为所述参考距离的29.2%处,所述翼型的弦长为37.85mm
±
3.79mm。
[0029]
在某些实施方式中,所述参考距离为105.99mm,在距离所述对称面为31mm处,所述翼型的安装角为33.24
°
,所述翼型的弦长为37.85mm。
[0030]
在某些实施方式中,在距离所述对称面为所述参考距离的57.6%处,所述翼型的安装角为37.83
°±
2.5
°
。
[0031]
在某些实施方式中,所述参考距离为105.99mm
±
10.60mm,在距离所述对称面为所述参考距离的57.6%处,所述翼型的弦长为30.76mm
±
3.08mm。
[0032]
在某些实施方式中,所述参考距离为105.99mm,在距离所述对称面为61mm处,所述翼型的安装角为37.83
°
,所述翼型的弦长为30.76mm。
[0033]
在某些实施方式中,在距离所述对称面为所述参考距离的84.0%处,所述翼型的安装角为43.12
°±
2.5
°
。
[0034]
在某些实施方式中,所述参考距离为105.99mm
±
10.60mm,在距离所述对称面为所述参考距离的84.0%处,所述翼型的弦长为24.33mm
±
2.43mm。
[0035]
在某些实施方式中,所述参考距离为105.99mm,在距离所述对称面为89mm处,所述翼型的安装角为43.12
°
,所述翼型的弦长为24.33mm。
[0036]
在某些实施方式中,其特征在于,所述机臂为靠近所述无人机的机头的机臂。
[0037]
在某些实施方式中,在距离所述对称面为所述参考距离的27.1%处,所述翼型的安装角为27.19
°±
2.5
°
。
[0038]
在某些实施方式中,所述参考距离为99.49mm
±
9.95mm,在距离所述对称面为所述参考距离的27.1%处,所述翼型的弦长为33.90mm
±
3.39mm。
[0039]
在某些实施方式中,所述参考距离为99.49mm,在距离所述对称面为27mm处,所述翼型的安装角为27.19
°
,所述翼型的弦长为33.90mm。
[0040]
在某些实施方式中,在距离所述对称面为所述参考距离的57.3%处,所述翼型的安装角为28.74
°±
2.5
°
。
[0041]
在某些实施方式中,所述参考距离为99.49mm
±
9.95mm,在距离所述对称面为所述参考距离的57.3%处,所述翼型的弦长为27.96mm
±
2.80mm。
[0042]
在某些实施方式中,所述参考距离为99.49mm,在距离所述对称面为57mm处,所述翼型的安装角为28.74
°
,所述翼型的弦长为27.96mm。
[0043]
在某些实施方式中,在距离所述对称面为所述参考距离的85.4%处,所述翼型的安装角为31.80
°±
2.5
°
。
[0044]
在某些实施方式中,所述参考距离为99.49mm
±
9.95mm,在距离所述对称面为所述参考距离的85.4%处,所述翼型的弦长为22.96mm
±
2.30mm。
[0045]
在某些实施方式中,所述参考距离为99.49mm,在距离所述对称面为85mm处,所述翼型的安装角为31.80
°
,所述翼型的弦长为22.96mm。
[0046]
在某些实施方式中,所述机臂为靠近所述无人机的机尾的机臂。
[0047]
在某些实施方式中,所述无人机还包括设置于所述机臂的第二指示灯,所述第二指示灯的出光面的延伸方向与所述机臂的延伸方向平行。
[0048]
在某些实施方式中,所述无人机还包括脚架,所述脚架设置在所述电机座的背离电机的一侧,所述脚架用于在所述无人机起降时支撑所述无人机。
[0049]
在某些实施方式中,所述脚架被所述无人机的偏航轴的法平面所截得的横截面的最大厚度为所述横截面的弦长的47.7%。
[0050]
在某些实施方式中,所述脚架被所述无人机的偏航轴的法平面所截得的横截面呈纺锤形。
[0051]
在某些实施方式中,自所述基座的下侧朝远离所述基座方向延伸的长度方向上,所述脚架的宽度逐渐变小。
[0052]
在某些实施方式中,所述脚架的宽度方向的表面呈流线型。
[0053]
在某些实施方式中,所述无人机还包括天线,所述脚架的厚度大于所述天线的宽度。
[0054]
在某些实施方式中,所述脚架为扁状结构。
[0055]
在某些实施方式中,所述无人机还包括第三指示灯,所述第三指示灯安装于所述脚架。
[0056]
在某些实施方式中,所述无人机还包括机臂,所述第三指示灯的朝向与所述机臂的延伸方向交叉。
[0057]
本技术还提供一种无人机,所述无人机包括机身及机臂,所述机臂的根部与所述机身连接,所述机臂包括用于与所述无人机的机身连接的根部及与所述根部相对的稍部,沿所述根部至所述稍部方向上,所述机臂的多个翼型的安装角逐渐增大,所述安装角为所述机臂的翼型的弦长与所述无人机的偏航轴的法平面之间的夹角。
[0058]
在某些实施方式中,每个所述翼型的最大厚度为所述翼型的弦长的47.7%。
[0059]
在某些实施方式中,所述翼型呈纺锤形。
[0060]
在某些实施方式中,所述机臂在所述无人机的偏航轴的法平面上投影呈梯形,所述梯形对应所述根部的边长大于所述梯形对应所述稍部的边长。
[0061]
在某些实施方式中,所述电机座设于所述稍部并具有与所述电机转轴重合的安装中心,所述机身具有对称面,所述安装中心到所述对称面具有一参考距离,在沿着所述根部到所述稍部的方向上,所述翼型的弦长与所述安装角呈负相关。
[0062]
在某些实施方式中,在距离所述对称面为所述参考距离的29.2%处,所述翼型的安装角为33.24
°±
2.5
°
。
[0063]
在某些实施方式中,所述参考距离为105.99mm
±
10.60mm,在距离所述对称面为所述参考距离的29.2%处,所述翼型的弦长为37.85mm
±
3.79mm。
[0064]
在某些实施方式中,所述参考距离为105.99mm在距离所述对称面为31mm处,所述翼型的安装角为33.24
°
,所述翼型的弦长为37.85mm。
[0065]
在某些实施方式中,在距离所述对称面为所述参考距离的57.6%处,所述翼型的安装角为37.83
°±
2.5
°
。
[0066]
在某些实施方式中,所述参考距离为105.99mm
±
10.60mm,在距离所述对称面为所述参考距离的57.6%处,所述翼型的弦长为30.76mm
±
3.08mm。
[0067]
在某些实施方式中,所述参考距离为105.99mm在距离所述对称面为61mm处,所述翼型的安装角为37.83
°
,所述翼型的弦长为30.76mm。
[0068]
在某些实施方式中,在距离所述对称面为所述参考距离的84.0%处,所述翼型的安装角为43.12
°±
2.5
°
。
[0069]
在某些实施方式中,所述参考距离为105.99mm
±
10.60mm,在距离所述对称面为所述参考距离的84.0%处,所述翼型的弦长为24.33mm
±
2.43mm。
[0070]
在某些实施方式中,所述参考距离为105.99mm在距离所述对称面为89mm处,所述翼型的安装角为43.12
°
,所述翼型的弦长为24.33mm。
[0071]
在某些实施方式中,所述机臂为靠近所述无人机的机头的机臂。
[0072]
在某些实施方式中,在距离所述对称面为所述参考距离的27.1%处,所述翼型的安装角为27.19
°±
2.5
°
。
[0073]
在某些实施方式中,所述参考距离为99.49mm
±
9.95mm,在距离所述对称面为所述参考距离的27.1%处,所述翼型的弦长为33.90mm
±
3.71mm。
[0074]
在某些实施方式中,所述参考距离为99.49mm,在距离所述对称面为27mm处,所述翼型的安装角为27.19
°
,所述翼型的弦长为33.90mm。
[0075]
在某些实施方式中,在距离所述对称面为所述参考距离的57.3%处,所述翼型的安装角为60.74
°±
2.5
°
。
[0076]
在某些实施方式中,所述参考距离为99.49mm
±
9.95mm,在距离所述对称面为所述参考距离的57.3%处,所述翼型的弦长为59.96mm
±
2.80mm。
[0077]
在某些实施方式中,所述参考距离为99.49mm,在距离所述对称面为61mm处,所述翼型的安装角为60.74
°
,所述翼型的弦长为59.96mm。
[0078]
在某些实施方式中,在距离所述对称面为所述参考距离的85.4%处,所述翼型的安装角为63.80
°±
2.5
°
。
[0079]
在某些实施方式中,所述参考距离为99.49mm
±
9.95mm,在距离所述对称面为所述参考距离的85.4%处,所述翼型的弦长为22.96mm
±
2.62mm。
[0080]
在某些实施方式中,所述参考距离为99.49mm,在距离所述对称面为89mm处,所述翼型的安装角为63.80
°
,所述翼型的弦长为22.96mm。
[0081]
在某些实施方式中,所述机臂为靠近所述无人机的机尾的机臂。
[0082]
本技术还提供一种无人机,所述无人机包括机身、机臂、及脚架,所述脚架设置在所述机臂的一侧,所述脚架用于在所述无人机起降时支撑所述无人机,所述脚架呈扁状结构。
[0083]
在某些实施方式中,所述脚架被所述无人机的偏航轴的法平面的所截得的横截面的最大厚度为所述横截面的弦长的47.7%。
[0084]
在某些实施方式中,所述脚架被所述无人机的偏航轴的法平面所截得的横截面呈纺锤形。
[0085]
在某些实施方式中,所述无人机还包括设置于所述脚架的指示灯,所述指示灯的出光面的延伸方向与所述机臂的延伸方向交叉。
[0086]
在某些实施方式中,所述脚架被所述无人机的偏航轴的法平面所截得的横截面的最大厚度为所述横截面的弦长的47.7%。
[0087]
在某些实施方式中,所述脚架被所述无人机的偏航轴的法平面所截得的横截面呈纺锤形。
[0088]
在某些实施方式中,所述无人机还包括电机座,在所述扁状结构的长度方向上自所述电机座的下侧朝远离所述电机座方向延伸,所述脚架的宽度逐渐变小。
[0089]
在某些实施方式中,所述脚架的宽度方向的表面呈流线型。
[0090]
在某些实施方式中,所述无人机还包括天线,所述脚架的厚度大于所述天线的宽度。
[0091]
本技术实施方式的无人机分别对电机座、机臂、及脚架做优化,以提高电机座、机臂、及脚架的整流效果,减少无人机飞行时电机座、机臂、及脚架处的流动阻力,降低无人机的飞行负担,增加无人机的续航能力。
[0092]
本技术的实施方式的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实施方式的实践了解到。
附图说明
[0093]
本技术的上述和/或附加的方面和优点从结合下面附图对实施方式的描述中将变得明显和容易理解,其中:
[0094]
图1是本技术某些实施方式的无人机的立体结构示意图;
[0095]
图2是本技术某些实施方式的无人机的平面结构示意图;
[0096]
图3是本技术某些实施方式的电机、电机座、及第一指示灯的立体结构示意图及无人机在巡航状态时机身的中心线相对水平面的倾角的示意图;
[0097]
图4是流体流经具有凸出部的电机座及流体流经不具有凸出部的电机座的示意图;
[0098]
图5是流体流经本技术的电机座及流体流经现有技术的电机座的示意图;
[0099]
图6是本技术某些实施方式的电机座及电机座在无人机的偏航轴的法平面的投影的示意图;
[0100]
图7是本技术某些实施方式的电机座及电机座在无人机的偏航轴的法平面的投影的示意图;
[0101]
图8是本技术某些实施方式的电机及电机座的示意图;
[0102]
图9是本技术某些实施方式的机臂的结构示意图;
[0103]
图10至图13是本技术某些实施方式的翼型的截面图;
[0104]
图14是本技术某些实施方式的机臂的结构示意图;
[0105]
图15至图17是本技术某些实施方式的翼型的截面图;
[0106]
图18是本技术某些实施方式的无人机飞行时的受阻示意图;
[0107]
图19是本技术某些实施方式的电机、电机座、脚架、及第三指示灯的示意图;
[0108]
图20是本技术某些实施方式的脚架的截面图;
[0109]
图21是本技术某些实施方式的无人机飞行时的受阻示意图。
具体实施方式
[0110]
下面详细描述本技术的实施方式,实施方式的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施方式是示例性的,仅用于解释本技术,而不能理解为对本技术的限制。
[0111]
在本技术的描述中,需要理解的是,术语“厚度”、“上”、“顶”、“底”、“内”、“外”、等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
[0112]
在本技术的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接或可以相互通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。
[0113]
下文的公开提供了许多不同的实施方式或例子用来实现本技术的不同结构。为了简化本技术的公开,下文中对特定例子的部件和设置进行描述。当然,它们仅仅为示例,并且目的不在于限制本技术。此外,本技术可以在不同例子中重复参考数字和/或参考字母,这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施方式和/或设置之间的关系。此外,本技术提供了的各种特定的工艺和材料的例子,但是本领域普通技术人员可以意识到其他工艺的应用和/或其他材料的使用。
[0114]
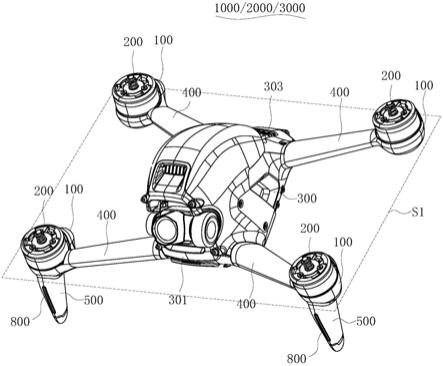
请参阅图1至图3,本技术提供一种无人机1000,无人机1000包括电机200和电机座100。电机座100包括基座10和凸出部20,基座10用于安装电机200,凸出部20从基座10延伸凸出,在无人机1000的飞行状态下,凸出部20朝向无人机1000的后侧方渐缩延伸。
[0115]
图1所示的无人机1000仅作为示例,本技术提供的无人机1000可以是双旋翼无人机1000、四旋翼无人机1000、六旋翼无人机1000、八旋翼无人机1000等多旋翼无人机1000,在此不作限制。
[0116]
无人机1000的后侧方是无人机1000飞行时从机头301至机尾303的方向,凸出部20的延伸方向朝向无人机1000的后侧方,沿凸出部20的延伸方向,凸出部20的宽度逐渐缩窄,如图4中(b)所示。可以理解,沿凸出部20的延伸方向,凸出部20的宽度可以不变,凸出部20的高度逐渐缩窄,如图5(b)所示。可以理解,在本技术实施例中,沿凸出部20的延伸方向,凸出部20的宽度和高度均逐渐缩窄。
[0117]
请结合图4,图4中(a)图示意一种电机座100没有凸出部20的无人机1000的飞行状态,图4中(b)图示意本技术实施方式的电机座100设有凸出部20的无人机1000的飞行状态。其中,p0是气流在(a)图示意的无人机1000的电机座100处的分离点,d0是气流在(a)图示意的无人机1000的电机座100的后侧方形成的分离区;p1是气流在(b)图示意的无人机1000的电机座100处的分离点,d1是气流在(b)图示意的无人机1000的电机座100的后侧方形成的分离区。分离区处的压力较小,因此在电机座100的前侧方受压力大于后侧方,形成向后侧方的尾流阻力,阻碍无人机1000向前飞行。
[0118]
相较于图4中(a)图示意的无人机1000,(b)图示意的无人机1000的电机座100的后侧方形成的分离区d1的尺寸大大减小。具体地,相较于(a)图示意的无人机1000,(b)图示意的无人机1000中,来流能够贴附基座10及凸出部20的表面流动,由于沿凸出部20的延伸方向,凸出部20的宽度逐渐缩窄,使来流能够在贴附凸出部20表面流动的过程中逐渐向内靠拢(即向靠近电机座100中心的方向靠拢,下同),使分离区d1的范围减小。同时,分离点p1相较分离点p0向电机座100的后侧方移动,使分离区的起始位置后移,进一步缩小分离区d1的范围。如此,本技术实施方式的无人机1000在向前飞行时,电机座100后侧方形成的分离区较小,能够显著减小无人机1000前飞时所受的流动阻力,从而减小无人机1000的飞行负担,进而能够降低无人机1000的飞行功耗,对于提高无人机1000的续航能力起到重要作用。
[0119]
综上,本技术实施方式的无人机1000的电机座100包括基座10和凸出部20,在无人机1000的飞行状态下,凸出部20至少部分朝向无人机1000的后侧方渐缩延伸,使来流能够贴附凸出部20的表面流动,以减小来流在电机座100后侧方形成的分离区,起到整流作用,能够显著减小无人机1000前飞时所受的流动阻力,进而减小无人机1000的飞行负担。
[0120]
下面结合附图进一步说明。
[0121]
请参阅图1及图2,无人机1000还包括机身300及机臂400。机臂400的一端连接机身
300,另一端连接电机座100。电机座100安装于机臂400,电机200安装于电机座100,电机200可负载各种型号的旋翼(图未示出)以带动旋翼转动,为无人机1000的飞行提供动力。
[0122]
其中,在无人机1000处于正常飞行状态时,电机座100可在电机200上方,旋翼可以安装在电机200下方;或者,电机座100在电机200下方,旋翼可以安装在电机200上方,在此不作限制。
[0123]
请结合图3,无人机1000在巡航状态时,机身300(以身300的中心线l1)相对水平面s0具有预设的倾角β,以使巡航状态的无人机1000各机臂400的扭矩能够达到平衡,重力、气动力和旋翼的拉力也保持平衡,以保持无人机1000的稳定飞行。倾角β的取值范围可以为[20
°
,30
°
],例如倾角β的取值可以是20.0
°
、21.5
°
、22.8
°
、23.2
°
、24.4
°
、25.0
°
、26.1
°
、27.5
°
、28.4
°
、29.3
°
、或30.0
°
等,在此不一一列举。
[0124]
请参阅图3及图8,基座10包括第一面11,基座10在第一面11开设有收容腔13,电机200部分收容在收容腔13内,使电机200安装在基座10上。凸出部20从基座10延伸凸出,凸出部20的表面为曲面,以使气流能够贴附在凸出部20的表面移动。电机座100还可包括延伸部30,延伸部30自凸出部20朝基座10的第一面11所在的一侧延伸,延伸部30包围电机200的至少部分区域。
[0125]
下面以在无人机1000处于正常飞行状态时,电机座100在电机200下方,旋翼安装在电机200上方为例进行说明,具体地,电机座100包括基座10、凸出部20、及延伸部30。
[0126]
基座10的第一面11可为平面。基座10还包括第二面12,基座10的第二面12可为弧面,并与基座10的第一面11相接,在无人机1000前飞时基座10的第二面12位于前方以与来流最先接触。基座10的第二面12为弧面,以使气流能够贴附在基座的第二面12流动,基座10的第二面12同样能够起整流作用,能够使贴附基座10的第二面12流动的来流的分离点向电机座100的后侧方移动,以使分离区的起始位置后移,减小分离区的范围,从而减小电机座100所受阻力。
[0127]
请参阅图3,在某些实施方式中,基座10的第二面12的轮廓的后缘点122的当地切线与无人机1000的偏航轴的法平面s1之间形成夹角α,该夹角α与无人机1000在巡航飞行时机身300的倾角β之间的差值在第一预定范围内,以限定第二面12的弧度,并一定程度能将贴附第二面12流动的来流导向内靠拢,进一步使分离区的范围减小,从而减小电机座100所受阻力。其中,第一预定范围可以是[1
°
,15
°
]等等,在此不限制。具体地,夹角α与倾角β之间满足关系式:α=β
‑
10
°
,以使第二面具有预定的弧度。例如,当倾角β为30
°
时,夹角α=30
°‑
10
°
=20
°
。
[0128]
需要说明的是,本文中所述的偏航轴是定义在机体轴系的,在本技术中机体坐标系为一右手系,定义x轴为机体前后方向,从前指向后,z轴为机体上下方向,从下指向上,y轴为机体左右方向,具体指向依据xz平面获得。本文中的无人机1000的偏航轴为机体坐标系中的z轴,无人机1000的偏航轴的法平面s1为垂直于z轴的xy平面,机体轴系与机身固联,不随飞行状态变化。在无人机1000处于无风悬停状态时,无人机1000的重力方向与无人机1000的偏航轴方向及机体坐标系中的z轴方向重合,该xy平面与水平面s0平行,即在无人机1000处于无风悬停状态时,无人机1000的偏航轴的法平面s1与水平面s0平行,在无人机1000处于巡航飞行状态时,无人机1000的偏航轴的法平面s1可相对水平面s0具有倾角β。此外,在无人机1000处于无风悬停状态时,电机的平面(电机转轴的法平面)与水平面之间有
一定的夹角,以满足无风悬停状态时重力、气动力和旋翼的拉力能够保持平衡,以保持无人机1000的悬停。可以理解,本文中所提及的无人机无风悬停状态可以大约相当于无人机在平地的起飞或降落状态。
[0129]
请继续参阅图3,当无人机1000处于巡航状态飞行时,基座10的第二面12在参考平面s2以下的部分起主要的整流作用,参考平面s2与水平面s0平行。基座10的第二面12的轮廓的最高点121为第二面12上距离参考平面s2最远的点。在某些实施方式中,基座10的第二面12的轮廓的最高点121的切线与无人机1000的偏航轴的法平面s1之间的夹角θ的取值范围为[30
°
,35
°
],例如,基座10的第二面12的轮廓的最高点121的切线与无人机1000的偏航轴的法平面s1之间的夹角θ的取值可以是30.0
°
、30.5
°
、31.0
°
、31.4
°
、32.0
°
、32.8
°
、33.0
°
、33.6
°
、34.0
°
、34.9
°
、或35.0
°
等,在此不一一列举。基座10的第二面12的轮廓的最高点121的切线与无人机1000的偏航轴的法平面s1之间的夹角θ的取值范围在[30
°
,35
°
]时,无人机1000以倾角β进行巡航时的来流方向能够接近基座10的第二面12的轮廓的最高点121的切线方向,以使无人机1000以倾角β进行巡航时的来流容易贴附基座10的第二面12的表面流动,以进一步使分离区的范围减小,从而减小电机座100所受阻力。凸出部20从基座10延伸凸出,凸出部20的表面为曲面并与第二面12接续形成平滑曲面,以使气流能够贴附在凸出部20的表面流动。
[0130]
请结合图5,图5中(a)图示意一种流体流经现有技术的电机座的示意图,图5中(b)图示意流体流经本技术实施方式的电机座100的示意图。其中,p0是气流在(a)图示意的无人机1000的电机座100处的分离点,d0是气流在(a)图示意的无人机1000的电机座100的后侧方形成的分离区;p1是气流在(b)图示意的无人机1000的电机座100处的分离点,d1是气流在(b)图示意的无人机1000的电机座100的后侧方形成的分离区。
[0131]
延伸部30朝向无人机1000的后侧方有一定的坡度,以能够引导经过电机200的气流贴附延伸部30的表面流动,使来流在延伸部30一侧的分离点p1向电机座100的后侧方移动,以使分离区d1的起始位置后移,减小分离区d1的范围。
[0132]
具体地,延伸部30靠近电机200的一侧(前侧)距离基座10的第一面11所在的平面较远,延伸部30远离电机200的一侧(后侧)距离基座10的第一面11所在的平面较近,以形成一个下行坡度,使贴附延伸部30表面流动的来流逐渐向内靠拢,进一步使分离区d1的范围减小,从而减小电机座100所受阻力。
[0133]
请参阅图3,在某些实施方式中,延伸部30可包括第一面31和第二面32,延伸部30的第一面31包围电机200的至少部分区域,延伸部30的第二面32与延伸部30的第一面31相接,延伸部30的第二面32的轮廓的最高点321的切线与无人机1000的偏航轴的法平面s1之间形成夹角γ,该夹角γ与无人机1000在巡航时机身300的倾角β之间的差值在第二预定范围内,以限定延伸部30朝向无人机1000的后侧方的坡度,以使贴附延伸部30表面移动的来流逐渐向内靠拢。其中,第二预定范围可以是[1
°
,15
°
]等等,在此不限制。具体地,夹角γ与倾角β之间满足关系式:γ=β 10
°
,以使第二面32具有预定的坡度。例如,当倾角β为30
°
时,夹角γ=30
°
10
°
=40
°
。需要说明的是,第二预定范围可以与第一预定范围相同,也可以不同。
[0134]
在某些实施方式中,延伸部30的第二面32的轮廓的最高点321的切线与无人机1000的偏航轴的法平面s1之间的夹角γ的取值范围为[30
°
,40
°
],例如,延伸部30的第二面
32的轮廓的最高点321的切线与无人机1000的偏航轴的法平面s1之间的夹角γ的取值可以是30.0
°
、30.5
°
、31.0
°
、31.4
°
、32.0
°
、32.8
°
、33.0
°
、33.6
°
、34.0
°
、34.9
°
、35.0
°
、36.5
°
、37.0
°
、38.4
°
、39.0
°
、或40.0
°
等,在此不一一列举,以在无人机1000以倾角β进行巡航时的来流方向能够接近延伸部30的第二面32的轮廓的最高点321的切线方向,以使无人机1000以倾角β进行巡航时的来流容易贴附延伸部30的第二面32流动,以进一步使分离区的范围减小,进而进一步减小电机座100所受阻力。
[0135]
请参阅图1、图2、及图6,在某些实施方式中,电机座100在无人机1000的偏航轴的法平面s1内的投影轮廓呈水滴形,使电机座100的表面能够呈流线型,进一步减小无人机1000飞行时所受的阻力。
[0136]
具体地,电机座100在无人机1000的偏航轴的法平面s1内的投影轮廓包括弧形的收容段14及与收容段14连接的整流段33。收容段14相当于水滴自由落体时的头部,整流段33相当于水滴自由落体时的尾部,沿远离收容段14的方向,整流段33渐缩。其中,基座10在无人机1000的偏航轴的法平面s1内的投影轮廓的一部分对应收容段14,至少部分延伸部30在无人机1000的偏航轴的法平面s1内的投影轮廓对应整流段33。
[0137]
请参阅图3及图6,在某些实施方式中,延伸部30在无人机1000的偏航轴的法平面s1内的投影轮廓呈梯形,即整流段33的轮廓呈梯形,沿远离收容段14的方向渐缩。与凸出部20的作用类似,延伸部30对应整流段33的部分同样起整流作用,能够使电机座100两侧的来流贴附整流段33流动,以使经整流段33整流后的来流在电机座100的后侧方向内靠拢,并使来流的分离点后移,从而减小分离区的范围,减小电机座100所受的阻力。
[0138]
请参阅图1、图2、图7、及图8,在某些实施方式中,在无人机1000处于正常飞行状态时,电机座100在电机200上方,旋翼安装在电机200下方,此时,电机座100在无人机1000的偏航轴的法平面s1内的投影轮廓呈纺锤形,使电机座100的表面能够呈流线型,进一步减小无人机1000飞行时所受的阻力。
[0139]
具体地,无人机1000在无人机1000的偏航轴的法平面s1内的投影轮廓还可包括导流段41,导流段41与整流段33分别位于收容段14的两侧。导流段41位于纺锤的头部,收容段14位于纺锤的中部,整流段33位于纺锤的尾部,沿远离收容段14的方向,导流段41和整流段33均渐缩。其中,基座10包括导流部40及整流部50,至少部分导流部40在无人机1000的偏航轴的法平面s1内的投影轮廓对应导流段41,至少部分整流部50在无人机1000的偏航轴的法平面s1内的投影轮廓对应收容段14,凸出部20对应整流段33。
[0140]
导流部40对应的导流段41在无人机1000的偏航轴的法平面s1内起导流作用,使无人机1000飞行时电机座100前侧方向的来流能够在导流段41的导引下贴附导流部40的表面依次流经导流段41、收容段14、及整流段33,以达到整流效果。具体地,导流段41沿靠近收容段14的方向逐渐扩展以具有一定的坡度,坡度的大小适宜,使来流沿该坡度的导流段41流动时容易贴附导流段41的表面,以将来流平滑地导向收容段14及整流段33,不会因坡度过大而将来流导向远离电机座100表面的方向。即,经导流段41改变流动方向的来流的方向与来流流经导流部40时的初始方向之间的夹角较小,以能够在无人机1000飞行时减小电机座100前侧方向的流动阻力。
[0141]
收容段14及整流段33对来流的整流效果与前文所述图4及图6的收容段14及整流段33对来流的整流效果类似,此处不再赘述。
[0142]
在某些实施方式中,导流部40在无人机1000的偏航轴的法平面s1内的投影轮廓呈三角形,即导流段41呈三角形,沿远离收容段14的方向渐缩。导流段41朝向电机座100前侧方向的角为预设的角度,以使导流段41沿靠近收容段14的方向具有预设的坡度,不会因为坡度太大导致来流导向远离电机座100表面的方向,也不会因为坡度太小导致导流部40需要做得很长反而增加电机座100前方的阻力。
[0143]
请参阅图8,在某些实施方式中,整流部50的外轮廓的最高点51的切线与无人机1000的偏航轴的法平面s1之间形成夹角φ,该夹角φ与无人机1000在巡航时机身300的倾角β相同,以在无人机1000飞行时使整流部50的外轮廓的最高点51的切线尽可能接近来流方向,使来流更容易贴附整流部50的表面流动,以使整流效果达到最佳。
[0144]
具体地,整流部50的外轮廓的最高点51的切线与无人机1000的偏航轴的法平面s1之间的夹角的取值范围φ为[30
°
,40
°
],例如,整流部50的外轮廓的最高点51的切线与无人机1000的偏航轴的法平面s1之间的夹角φ的取值可以是30.0
°
、30.5
°
、31.0
°
、31.4
°
、32.0
°
、32.8
°
、33.0
°
、33.6
°
、34.0
°
、34.9
°
、35.0
°
、36.5
°
、37.0
°
、38.4
°
、39.0
°
、或40.0
°
等,在此不一一列举。以在无人机1000的机身300以倾角β巡航时,整流部50的外轮廓的最高点51的切线能够尽可能接近来流方向,使整流效果达到最佳。
[0145]
综上,本技术的无人机1000的电机座100中,基座10的第二面12、整流部50、凸出部20、及导流部40均能分别起到整流效果,并共同减少无人机1000飞行时电机座100的流动阻力,以降低无人机1000的飞行负担,增加无人机1000的续航能力。
[0146]
请参阅图1、图2、图9及图14,在某些实施方式中,机臂400包括用于与无人机1000的机身300连接的根部410及与根部410相对的稍部420,沿根部410至稍部420方向上,机臂400的多个翼型430的安装角ω逐渐增大,安装角ω为机臂400的翼型430的弦长l与无人机1000的偏航轴的法平面s1之间的夹角。
[0147]
需要说明的是,本文中所述的偏航轴是定义在机体轴系的,在本技术中机体坐标系为一右手系,定义x轴为机体前后方向,从前指向后,z轴为机体上下方向,从下指向上,y轴为机体左右方向,具体指向依据xz平面获得。本文中的无人机1000的偏航轴为机体坐标系中的z轴,无人机1000的偏航轴的法平面s1为垂直于z轴的xy平面,机体轴系与机身固联,不随飞行状态变化。在无人机1000处于无风悬停状态时,无人机1000的重力方向与无人机1000的偏航轴方向及机体坐标系中的z轴方向重合。即,在无风悬停状态下无人机1000的偏航轴的法平面s1与水平面s0平行。可以理解,本文中所提及的无人机无风悬停状态可以大约相当于无人机在平地的起飞或降落状态。
[0148]
考虑无人机1000飞行时旋翼桨叶滑流对自由来流的影响,沿根部410至稍部420方向上机臂400的多个翼型430的安装角逐渐增大能够对自由来流起到一定的整流效果,以能够减小机臂400处的流动阻力,降低无人机1000的飞行负担,增加无人机1000的续航能力。
[0149]
具体地,受旋翼转动影响,机臂400根部410至稍部420不同位置处的来流方向有所不同。机臂400不同截面位置处翼型430对应不同的安装角ω,使无人机1000飞行时机臂400不同截面位置处的外轮廓的最高点的切线能够尽可能接近该位置处的来流方向,使整流效果达到最佳。
[0150]
下面结合附图做进一步说明。
[0151]
请参阅图10,在某些实施方式中,每个翼型430的最大厚度为翼型430的弦长的
47.7%,以满足翼型430的结构强度和刚度的要求。
[0152]
进一步地,翼型430可以呈纺锤型,以使机臂400具有流线型的表面,进一步减少无人机1000飞行时的流动阻力。
[0153]
请参阅图9及图14,在某些实施方式中,机臂400在无人机1000的偏航轴的法平面s1上投影呈梯形,梯形对应根部410的边长大于梯形对应稍部420的边长,以满足机臂400的结构强度和刚度的要求。
[0154]
在某些实施方式中,在沿着根部410到稍部420的方向上,翼型430的弦长l与安装角ω呈负相关。即翼型430的弦长越长,对应的安装角ω越小;翼型430的弦长l越短,对应的安装角ω越大。
[0155]
具体地,稍部420设有电机座100,电机座100具有与电机200转轴重合的安装中心60,机身300具有对称面310,安装中心60到对称面310具有一参考距离。
[0156]
下面以机臂400作为无人机1000的前机臂为例进行说明,其中,前机臂为靠近无人机1000的机头301的机臂400。请结合图9,图9所示的机臂400中,电机座100的凸出部20的延伸方向朝向机臂400在无人机1000的偏航轴的法平面s1的投影中较长边的方向。
[0157]
请结合图11,在距离对称面310为参考距离的29.2%处a1,翼型430的安装角ωf1为33.24
°±
2.5
°
,以起到一定的整流作用,在无人机1000飞行时减少机臂400所受的阻力。例如安装角ωf1可以是30.74
°
、33.24
°
、或35.74
°
;或者是30.75
°
、31.24
°
、32.56
°
、33.69
°
、34.11
°
、35.72
°
等介于30.74
°
和35.74
°
之间的任意角度,在此不一一列举。
[0158]
请结合图12,在距离对称面310为参考距离的57.6%处a2,翼型430的安装角ωf2为37.83
°±
2.5
°
,以起到一定的整流作用,在无人机1000飞行时减少机臂400所受的阻力。例如安装角ωf2可以是35.33
°
、37.83
°
、或40.33
°
;或者是35.75
°
、36.24
°
、37.56
°
、38.69
°
、39.11
°
、40.12
°
等介于35.33
°
和40.33
°
之间的任意角度,在此不一一列举。
[0159]
请结合图13,在距离对称面310为参考距离的84.0%处a3,翼型430的安装角ωf3为43.12
°±
2.5
°
,以起到一定的整流作用,在无人机1000飞行时减少机臂400所受的阻力。例如安装角ωf3可以是40.62
°
、43.12
°
、或45.62
°
;或者是40.75
°
、41.24
°
、42.56
°
、43.69
°
、44.11
°
、45.12
°
等介于40.62
°
和45.62
°
之间的任意角度,在此不一一列举。
[0160]
请参阅图9,在某些实施方式中,参考距离为105.99mm
±
10.60mm,例如参考距离可以是95.39mm、105.99mm、或116.59mm;或者是96.77mm、97.51mm、98.47mm、99.89mm、100.21mm、102.58mm、104.78mm、107.68mm、109.23mm、113.72mm、115.99mm、等介于95.39mm和116.59mm之间的任意距离,在此不一一列举。
[0161]
请结合图11,对应地,在距离对称面310为参考距离的29.2%处a1,翼型430的弦长lf1为37.85mm
±
3.79mm,以满足翼型430的结构强度和刚度的要求。例如翼型430的弦长lf1可以是34.06mm、37.85mm、或41.64mm;或者是34.18mm、35.77mm、36.51mm、37.47mm、38.89mm、39.21mm、40.58mm、41.18mm等介于34.06mm和41.64mm之间的任意距离,在此不一一列举。
[0162]
请结合图12,对应地,在距离对称面310为参考距离的57.6%处a2,翼型430的弦长lf2为30.76mm
±
3.08mm,以满足翼型430的结构强度和刚度的要求。例如翼型430的弦长lf2可以是27.68mm、30.76mm、或33.84mm;或者是27.88mm、28.77mm、29.51mm、30.47mm、31.89mm、32.21mm、33.58mm等介于27.68mm和33.84mm之间的任意距离,在此不一一列举。
[0163]
请结合图13,对应地,在距离对称面310为参考距离的84.0%处a3,翼型430的弦长lf3为24.33mm
±
2.43mm,以满足翼型430的结构强度和刚度的要求。例如翼型430的弦长lf3可以是21.90mm、24.33mm、或26.76mm;或者是21.98mm、22.77mm、23.51mm、24.47mm、25.89mm、26.21mm等介于21.90mm和26.76mm之间的任意距离,在此不一一列举。
[0164]
本技术的实施例中,参考距离为105.99mm。在距离对称面310为31mm处,翼型430的安装角ωf1为33.24
°
,翼型430的弦长lf1为37.85mm。在距离对称面310为61mm处,翼型430的安装角ωf2为37.83
°
,翼型430的弦长lf2为30.76mm。在距离对称面310为89mm处,翼型430的安装角ωf3为43.12
°
,翼型430的弦长lf3为24.33mm。如此,能够满足翼型430的结构强度和刚度的要求,并能够起到一定的整流作用,在无人机1000飞行时减少机臂400所受的阻力。
[0165]
请参阅图14,在某些实施方式中,无人机1000还包括另一种机臂400,该机臂400作为无人机1000的后机臂,其中,后机臂为靠近无人机1000的机尾303的机臂400。如图14所示。
[0166]
请参阅图14及图15,在距离对称面310为参考距离的27.1%处b1,翼型430的安装角ωb1为27.19
°±
2.5
°
,以起到一定的整流作用,在无人机1000飞行时减少机臂400所受的阻力。例如安装角ωb1可以是24.69
°
、27.19
°
、或29.69
°
;或者是24.75
°
、25.24
°
、26.56
°
、27.69
°
、28.11
°
、29.72
°
等介于24.69
°
和29.69
°
之间的任意角度,在此不一一列举。
[0167]
请结合图16,在距离对称面310为参考距离的57.3%处b2,翼型430的安装角ωb2为28.74
°±
2.5
°
,以起到一定的整流作用,在无人机1000飞行时减少机臂400所受的阻力。例如安装角ωb2可以是26.24
°
、28.74
°
、或31.24
°
;或者是26.75
°
、27.24
°
、28.56
°
、29.69
°
、30.11
°
、31.12
°
等介于26.24
°
和31.24
°
之间的任意角度,在此不一一列举。
[0168]
请结合图17,在距离对称面310为参考距离的85.4%处b3,翼型430的安装角ωb3为31.80
°±
2.5
°
,以起到一定的整流作用,在无人机1000飞行时减少机臂400所受的阻力。例如安装角ωb3可以是29.30
°
、31.80
°
\或34.30
°
;或者是29.75
°
、30.24
°
、31.56
°
、32.69
°
、33.11
°
、34.12
°
等介于29.30
°
和34.30
°
之间的任意角度,在此不一一列举。
[0169]
请参阅图14,在某些实施方式中,参考距离为99.49mm
±
9.95mm,例如参考距离可以是89.54mm、99.49mm、或109.44mm;或者是90.77mm、93.51mm、95.47mm、98.89mm、100.21mm、102.58mm、104.78mm、107.68mm、109.23mm等介于89.54mm和109.44mm之间的任意距离,在此不一一列举。
[0170]
请结合图15,对应地,在距离对称面310为参考距离的27.1%处b1,翼型430的弦长lb1为33.90mm
±
3.39mm,以满足翼型430的结构强度和刚度的要求。例如翼型430的弦长lb1可以是30.51mm、33.90mm、或37.29mm;或者是30.08mm、31.18mm、32.77mm、33.51mm、34.47mm、35.89mm、36.21mm、37.18mm等介于30.51mm和37.29mm之间的任意距离,在此不一一列举。
[0171]
请结合图16,对应地,在距离对称面310为参考距离的57.3%处b2,翼型430的弦长lb2为27.96mm
±
2.80mm,以满足翼型430的结构强度和刚度的要求。例如翼型430的弦长lb2可以是25.16mm、27.96mm、或30.76mm;或者是25.88mm、26.77mm、27.51mm、28.47mm、29.89mm、30.21mm等介于25.16mm和30.76mm之间的任意距离,在此不一一列举。
[0172]
请结合图17,对应地,在距离对称面310为参考距离的85.4%处b3,翼型430的弦长
lb3为22.96mm
±
2.30mm,以满足翼型430的结构强度和刚度的要求。例如翼型430的弦长lb2可以是20.66mm、22.96mm、或25.26mm;或者是20.98mm、20.77mm、21.51mm、22.47mm、23.89mm、24.21mm等介于22.66mm和25.26mm之间的任意距离,在此不一一列举。如此,能够以满足翼型430的结构强度和刚度的要求,并能够起到一定的整流作用,在无人机1000飞行时减少机臂400所受的阻力。
[0173]
在本技术的实施例中,靠近无人机1000的机尾303的机臂400的参考距离为99.49mm。在距离对称面310为27mm处,翼型430的安装角ωb1为27.19
°
,翼型430的弦长lb1为33.90mm。在距离对称面310为57mm处,翼型430的安装角ωb2为28.74
°
,翼型430的弦长lb2为27.96mm。在距离对称面310为85mm处,翼型430的安装角ωb3为31.80
°
,翼型430的弦长lb2为22.96mm。如此,能够以满足翼型430的结构强度和刚度的要求,并能够起到一定的整流作用,在无人机1000飞行时减少机臂400所受的阻力。
[0174]
综上,本技术实施方式的无人机1000中,通过设置机臂400翼型430的弦长、厚度、及安装角,能够使机臂400起到一定的整流作用,在无人机1000飞行时减少机臂400所受的阻力,从而能够降低无人机1000的飞行功耗,提高无人机1000的续航能力。
[0175]
请一并参阅图1至图18,本技术实施方式的无人机1000中,分别对电机座100及机臂400做优化,以提高电机座100及机臂400的整流效果,减少无人机1000飞行时电机座100的流动阻力,降低无人机1000的飞行负担,增加无人机1000的续航能力。如图18所示,图18为无人机1000飞行时所受的阻力示意图,图18的纵坐标表示无人机1000的阻力分布,横坐标表示从机身300的对称面310至机臂400末梢延伸的展向位置,展向位置0.1m处附近大致为电机200所在的位置。可见,相较于未做优化的无人机1000,对机臂400做优化后的无人机1000,在机臂400处所受的阻力显著下降,在机臂400中段受阻近乎下降50%,但在电机200处所受的阻力无明显下降。相较于未做优化的无人机1000,对机臂400及电机座100均做如前所述的优化后的无人机1000,在机臂400处所受的阻力显著下降,在机臂400中段受阻下降近50%,在电机200处所受的阻力也显著下降近50%,极大程度地降低了无人机1000飞行时所受的阻力。
[0176]
请参阅图19,在某些实施方式中,无人机1000还可包括脚架500,脚架500设置在电机座100的背离电机200的一侧,脚架500用于在无人机1000起降时支撑无人机1000。
[0177]
脚架500可以安装在如图9所示的靠近无人机1000的机头301的机臂400,也可以安装在如图14所示的靠近无人机1000的机尾303的机臂400,在此不作限制。
[0178]
请结合图20,脚架500为扁状结构。沿基座10的下侧朝远离基座10方向为脚架500的长度方向,沿机头301至机尾303的轴线平行的方向为脚架500的宽度方向,在脚架500被无人机1000的偏航轴的法平面s1中与宽度方向垂直的方向为脚架500的厚度方向。脚架500的长度大于脚架500的宽度和厚度,脚架500的宽度大于脚架500的厚度,使脚架500形成扁状结构,以具有良好的整流效果。
[0179]
在某些实施方式中,自基座10的下侧朝远离基座10方向延伸的长度方向上,脚架500宽度逐渐变小,以具有一定的整流作用,使来流能够贴附脚架500表面流动以减小脚架500处的流体阻力。
[0180]
在某些实施方式中,脚架500的宽度方向的表面呈流线型,以更有利于来流贴附脚架500表面流动,从而减小脚架500处的流体阻力。具体地,在一个实施例中,脚架500被无人
机1000的偏航轴的法平面s1所截得的横截面呈纺锤形,以利于来流贴附脚架500表面流动,从而减小脚架500处的流体阻力。
[0181]
在某些实施方式中,无人机1000还包括天线(图未示出),脚架500的厚度大于天线的宽度。具体地,脚架500被无人机1000的偏航轴的法平面s1所截得的横截面的最大厚度为横截面的弦长的47.7%,以使天线能够装入脚架500。
[0182]
综上,本技术实施方式的无人机1000中,通过设置扁状结构的脚架500,在无人机1000飞行时使脚架500处所受的阻力能够降低,从而能够降低无人机1000的飞行功耗,提高无人机1000的续航能力。
[0183]
请一并参阅图1至图21,本技术实施方式的无人机1000中,分别对电机座100、机臂400、及脚架500做优化,以提高电机座100、机臂400、及脚架500的整流效果,减少无人机1000飞行时电机座100、机臂400、及脚架500处的流动阻力,降低无人机1000的飞行负担,增加无人机1000的续航能力。如图21所示,图21为无人机1000飞行时所受的阻力示意图,图21的纵坐标表示无人机1000的阻力分布,横坐标表示从机身300的对称面310至机臂400末梢延伸的展向位置,展向位置0.1m处附近大致为电机200所在的位置。可见,相较于未做优化的无人机1000,对电机座100、机臂400、及脚架500均做如前述的优化后的无人机1000在机臂400处所受的阻力显著下降,在机臂400中段受阻下降近50%,在电机200处所受的阻力也显著下降近50%,极大程度地降低了无人机1000飞行时所受的阻力。
[0184]
请参阅图1至图3,在某些实施方式中,无人机1000还可包括第一指示灯600,第一指示灯600安装于凸出部20并从无人机1000的后侧方露出。具体地,第一指示灯600的朝向与机臂400的延伸方向交叉。
[0185]
第一指示灯600可以为一个或多个,例如凸出部20上可装有1个、2个、3个、4个、5个等第一指示灯600,在此不作限制。第一指示灯600可发出一种或多种颜色的光信号,以指示无人机1000的状态信息。例如发出1种、2种、3种、4种、5种等光信号,在此不作限制。
[0186]
例如,第一指示灯600包括3个,分别能够发出红色光信号、绿色光信号、及黄色光信号。根据第一指示灯600的光信号可以指示无人机1000不同的状态信息。例如,绿光慢闪示意无人机1000可安全飞行;黄灯快闪示意遥控器信号中断;红灯慢闪示意低电量报警、红灯常亮示意严重错误等,在此不作限制。
[0187]
请参阅图1及图2,在某些实施方式中,无人机1000还可包括设置于机臂400的第二指示灯700,第二指示灯700的出光面的延伸方向与机臂400的延伸方向平行。
[0188]
第二指示灯700可以为一个或多个,例如每个机臂400上可装有1个、2个、3个、4个、5个等第二指示灯700,在此不作限制。第二指示灯700可发出一种或多种颜色的光信号,以指示无人机1000的状态信息。例如发出1种、2种、3种、4种、5种等光信号,在此不作限制。
[0189]
例如,第二指示灯700包括3个,分别能够发出红色光信号、绿色光信号、及黄色光信号。根据第二指示灯700的光信号可以指示无人机1000不同的状态信息。例如,绿光慢闪示意无人机1000可安全飞行;黄灯快闪示意遥控器信号中断;红灯慢闪示意低电量报警、红灯常亮示意严重错误等,在此不作限制。
[0190]
请参阅图19,在某些实施方式中,无人机1000还可包括第三指示灯800,所述第三指示灯800安装于脚架500。具体地,第三指示灯800的朝向与机臂400的延伸方向交叉。
[0191]
第三指示灯800可以为一个或多个,例如脚架500上可装有1个、2个、3个、4个、5个
等第三指示灯800,在此不作限制。第三指示灯800可发出一种或多种颜色的光信号,以指示无人机1000的状态信息。例如发出1种、2种、3种、4种、5种等光信号,在此不作限制。
[0192]
例如,第三指示灯800包括3个,分别能够发出红色光信号、绿色光信号、及黄色光信号。根据第三指示灯800的光信号可以指示无人机1000不同的状态信息。例如,绿光慢闪示意无人机1000可安全飞行;黄灯快闪示意遥控器信号中断;红灯慢闪示意低电量报警、红灯常亮示意严重错误等,在此不作限制。
[0193]
请一并参阅图1、图2、图9、及图19,在某些实施方式中,无人机1000包括第一指示灯600、第二指示灯700、及第三指示灯800中的至少一种。例如无人机1000仅包括第一指示灯600;无人机1000仅包括第二指示灯700;无人机1000仅包括第三指示灯800;无人机1000仅包括第一指示灯600及第二指示灯700;无人机1000仅包括第一指示灯600及第三指示灯800;无人机1000仅包括第二指示灯700及第三指示灯800;及无人机1000同时包括第一指示灯600、第二指示灯700、及第三指示灯800等方案中的一种。当无人机1000包括至少第一指示灯600、第二指示灯700、及第三指示灯800中的至少两种时,至少两种指示灯发出的光信号的组合能够共同指示无人机1000的状态信息。
[0194]
例如,无人机1000同时包括第一指示灯600、第二指示灯700、及第三指示灯800,其中,第一指示灯600能够发出红色光信号,第二指示灯700能够发出黄色光信号,第三指示灯800能够发出绿色光信号,根据第一指示灯600、第二指示灯700、及第三指示灯800的光信号可以指示无人机1000不同的状态信息。例如第一指示灯600及第二指示灯700交替闪烁,即红黄灯交替闪烁时,表示指南针数据错误;再例如第二指示灯700及第三指示灯800交替闪烁,即黄绿灯交替闪烁时,表示无人机1000的系统处于自检状态。
[0195]
请参阅图1、图2、图9、及图14,本技术还提供一种无人机2000,无人机2000包括机身300及机臂400,机臂400的根部410与机身300连接,机臂400包括用于与无人机2000的机身300连接的根部410及与根部410相对的稍部420,沿根部410至稍部420方向上,机臂400的多个翼型430的安装角ω逐渐增大,安装角ω为机臂400的翼型430的弦长l与垂直于无人机2000的偏航轴的平面s1之间的夹角。
[0196]
机臂400的具体结构与前文所述图9及图14的机臂400相同,在此不做赘述。机臂400的稍部420可安装前文所述图5和/或图8的电机座100,在此不作限制。
[0197]
本技术实施方式的无人机2000中,通过设置机臂400翼型430的弦长、厚度、及安装角,能够使机臂400起到一定的整流作用,在无人机2000飞行时减少机臂400所受的阻力,从而能够降低无人机2000的飞行功耗,提高无人机2000的续航能力。请结合图18,相较于未做优化的无人机,对机臂400做优化后的无人机2000在机臂400处所受的阻力显著下降,在机臂400中段受阻近乎下降50%,对减少飞行状态的无人机2000所受的阻力有显著效果。
[0198]
请参阅图1、图2、图19、及图20,本技术还提供一种无人机3000,无人机3000包括机身300、机臂400、及脚架500。脚架500设置在机臂400的一侧,脚架500用于在无人机3000起降时支撑无人机3000,脚架500呈扁状结构。
[0199]
脚架500的具体结构与前文所述图19及图20的脚架500相同,在此不做赘述。无人机3000可包括前文所述图5和/或图8的电机座100,并在前文所述图5和/或图8的电机座100下方安装脚架500;无人机3000还可包括前文所述图9和/或图14的机臂400,并在前文所述图9和/或图14的机臂400的一侧安装脚架500,在此不作限制。
[0200]
本技术实施方式的无人机3000中,通过设置扁状结构的脚架500,在无人机3000飞行时使脚架500处所受的阻力能够降低,从而能够降低无人机3000的飞行功耗,提高无人机3000的续航能力。请结合图21,相较于未做优化的无人机3000,对电机座100、机臂400、及脚架500做优化后的无人机3000在机臂400处所受的阻力显著下降,在机臂400中段受阻下降近50%,在电机200处所受的阻力也显著下降近50%,极大程度地降低了无人机3000飞行时所受的阻力。
[0201]
在本说明书的描述中,参考术语“一个实施方式”、“一些实施方式”、“示意性实施方式”、“示例”、“具体示例”、或“一些示例”等的描述意指结合所述实施方式或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施方式或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施方式或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施方式或示例中以合适的方式结合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。