1.本发明涉及路径规划技术领域,具体涉及一种井下铲运机的路径规划系统。
背景技术:
2.随着现有矿产资源逐步全面转入地下开采,并向深部和难采矿体发展,开采规模逐渐增大,采矿条件愈来愈恶劣,对人的安全威胁也愈来愈大,遥控采矿技术应运而生。地下铲运机是地下无轨采矿的关键设备,实现地下铲运机在井下巷道内无人操纵、自主行驶,可使操作人员远离井下恶劣、危险的工作环境,保护铲运机司机人员安全、提高采矿作业效率并降低采矿成本。地下铲运机自主行驶首先要解决自身在巷道内的自主行驶及避障运动控制问题及目标路径规划问题。
3.井下铲运机运动轨迹为隧道式交叉类型,由于巷道狭窄,铲运车一般只能前进正向和后退正向,配合的左右转弯进行移动,难以实现原地掉头。地下铲运机自主行驶研究在国内刚刚起步,国外在此方面已有较多的研究。如澳大利亚彼得里德利对铲运机运动轨迹和轨迹控制进行了研究,构建了自主铲运机自主行驶控制模型,该自主行驶控制模型在小曲率路径跟踪时误差较小,但在目标路径曲率较大时,跟踪误差较大,不能满足控制精度要求。美国丰约翰对轮式机器人路径跟踪问题进行了研究,但将目标路径局限于直线段和圆弧段,让轮式机器人跟踪每一个直线段或圆弧段,给出跟踪直线段或圆弧段的计算办法,该方法不能对其他形状曲线路径进行跟踪计算,同时该研究也未涉及铰接车辆情况,故无法应用于地下铲运机。北京矿治研究总院发明了一种基于车辆轨迹精确推算模型的地下铲运机自主行驶控制方法,可较精确计算出铲运机的跟踪轨迹与目标路径之间存在的偏差值,构成综合偏差来控制铲运机转向并跟踪目标路径,该方法没有考虑避障运动控制问题,另外,当跟踪偏差较大时,控制系统的稳定性和控制精度会受到较大影响。所以,需要进一步研究解决地下铲运机在较大偏差情况下,自主行驶控制器的稳定性问题,并提高自主行驶控制精度。
4.另外,在铲运机铲装矿石出矿过程中,除了在巷道中心线位置铲装料堆中部的矿石外,还需要进行障碍物规避,避免误碰巷道墙壁或其它物品。要规划出每一条偏离巷道主目标路径的路径数据量较大,也比较麻烦;为了降低井下巷道开拓成本,井下巷道的形状和尺寸一般允许有一定程度的不规则情况存在,这给井下巷道目标路径规划带来困难。
技术实现要素:
5.为此,本发明提供一种井下铲运机的路径规划系统,以解决现有铲运机在井下难以自主移动铲运矿石的问题。
6.为了实现上述目的,本发明提供如下技术方案:
7.本发明公开了一种井下铲运机的路径规划系统,所述系统包括:地图导入模块、路径规划模块、定位点功能设置模块、路径功能设置模块、路径生成模块;
8.所述地图导入模块将cad巷道地图和电子地图导入数据库;
9.所述路径规划模块根据采场和溜井的位置划定铲运车的往复行驶路径;
10.所述定位点功能设置模块针对行驶路径中的定位点的功能进行定义,确定铲运机的动作;
11.所述路径功能设置模块将行驶路线中所有的定位点的功能进行整合,完成整条路径的行驶方向和动作的定义;
12.所述路径生成模块按照出矿路径和倒矿路径生成对应的路径,铲运机按照生成的路径自动行进。
13.进一步地,所述地图导入模块导入地图数据之前进行路径数据库初始化、导航路径初始化、铲运机起始位置定位判定,初始化完成后导入cad巷道地图和电子地图,在地图中展示采场和溜井的位置。
14.进一步地,所述路径规划模块根据选定的采场和溜井的位置,初步规划出采场与溜井之间铲运机最佳的行驶路径,行驶路径中的分叉处和端部均设置有定位点。
15.进一步地,所述定位点功能设置模块确定一个定位点,对定位点进行命名,并定义此定位点的功能,所述定位点功能设置模块包括:车头方向判定单元和行驶方向判定单元,根据铲运机车头的方向和行驶方向确定定位点的功能。
16.进一步地,所述车头方向判定单元通过视觉图像对铲运机图像进行采集,对图像识别后判定车头的方向。
17.进一步地,所述行驶方向判定单元通过雷达传感器采集铲运机位置变化信息,确定铲运机行驶的方向。
18.进一步地,所述定位点的功能定义包括:前进、后退、左转、右转、停车、换向、倒矿、铲矿,根据实际情况选择定位点的功能。
19.进一步地,所述路径功能设置模块针对行驶路径中所有的定位点的功能进行确定,按照行驶路径方向逐个添加,定义完成后形成带有行驶指导功能的路径规划方案。
20.进一步地,所述路径生成模块生成出矿路径和倒矿路径,在出矿路径和倒矿路径中同一个定位点根据车头方向和行驶方向的不同定义不同的功能。
21.进一步地,所述路径生成模块生成路径后,铲运车根据规划的路径进入自动驾驶模式,沿着路径进行自动铲矿、倒矿。
22.本发明具有如下优点:
23.本发明公开了一种井下铲运机的路径规划系统,通过导入cad巷道地图和电子地图生成整体规划地图,在地图中选定采场和溜井,规划铲运机的行驶路径,在行驶路径中对定位点进行功能定义,使铲运机行驶到定位点时能够自动进行下一步动作。满足铲运机在井下自动运行的要求,提升生产效率,降低人工操控风险。
附图说明
24.为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引申获得其它的实施附图。
25.本说明书所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供
熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。
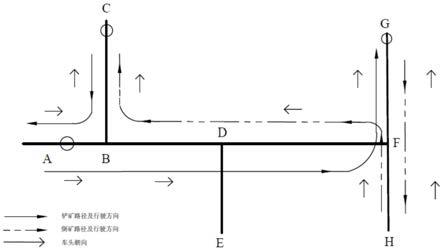
26.图1为本发明实施例提供的一种井下铲运机的路径规划系统路线规划示意图;
27.图2为本发明实施例提供的一种井下铲运机的路径规划系统流程图;
具体实施方式
28.以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
29.实施例
30.参考图1-图2,本实施例公开了一种井下铲运机的路径规划系统,所述系统包括:地图导入模块、路径规划模块、定位点功能设置模块、路径功能设置模块、路径生成模块;
31.所述地图导入模块将cad巷道地图和电子地图导入数据库;
32.所述路径规划模块根据采场和溜井的位置划定铲运车的往复行驶路径;
33.所述定位点功能设置模块针对行驶路径中的定位点的功能进行定义,确定铲运机的动作;
34.所述路径功能设置模块将行驶路线中所有的定位点的功能进行整合,完成整条路径的行驶方向和动作的定义;
35.所述路径生成模块按照出矿路径和倒矿路径生成对应的路径,铲运机按照生成的路径自动行进。
36.地图导入模块导入地图数据之前进行路径数据库初始化、导航路径初始化、铲运机起始位置定位判定,初始化完成后导入cad巷道地图和电子地图,在地图中展示采场和溜井的位置。
37.cad巷道地图和电子地图均提前绘制或者提前采集巷道内的整体路线布局生成gis电子地图。井下内具有多处采点和溜井,需要对每个采点和溜井位置进行标注,便于选定目标进行路径规划。
38.路径规划模块根据选定的采场和溜井的位置,初步规划出采场与溜井之间铲运机最佳的行驶路径,行驶路径中的分叉处和端部均设置有定位点。所述定位点功能设置模块确定一个定位点,对定位点进行命名,并定义此定位点的功能,所述定位点功能设置模块包括:车头方向判定单元和行驶方向判定单元,根据铲运机车头的方向和行驶方向确定定位点的功能。
39.车头方向判定单元通过视觉图像对铲运机图像进行采集,对图像识别后判定车头的方向;先采集铲运机的实时图像,经过图像处理设备对图像内容进行识别,根据车头的结构特征对车头进行识别,识别完成后确定出车头的位置和朝向。
40.行驶方向判定单元通过雷达传感器采集铲运机位置变化信息,确定铲运机行驶的方向,具体过程为:雷达传感器实时检测铲运机的位置,并对铲运机进行实时跟踪,检测铲运机与雷达传感器之间距离的变化,通过结合铲运机位置和距离的变化判断出铲运机的运
动方向。由于在路径规划过程中,铲运机有出矿路径和倒矿路径,所以在经过有些定位点时,需要有不同的功能指令,所以需要判断铲运机的车头方向和运动方向,从而匹配确定定位点的功能。定位点的功能定义包括:前进、后退、左转、右转、停车、换向、倒矿、铲矿,根据实际情况选择定位点的功能。
41.参考图1,在一个具体实施过程中,a点为铲运车的起始位置,c点为溜井进行倒矿,g点为采场进行采矿。在采矿路径中,从起始a点向采场g点行进,位置a点功能定义为前进,经过b点,对b点功能定义为前进,经过d点,对d点功能定义为前进,铲运车到达f点;对f点功能定义为左转,铲运车左转后运行至采场g点,对g点功能定义为铲矿,完成采矿过程。
42.在倒矿路径中,从采场g点行进至溜井c点进行倒矿,倒矿完成后返回起始位置a点。对g点功能定义为后退,经过f点,对f点功能定义为后退,铲运机继续后退至h点,对h点功能定义为停车并前进,再次经过f点,对f点功能定义为左转,铲运机左转后运行至d点,对d点功能定义为前进,铲运机继续前进至b点,对b点定义为右转,铲运机右转后运行至c点溜井,对c点功能定义为倒矿,铲运机进行倒矿动作,倒矿完成后,铲运机后退至b点,对b点功能定义为右转,铲运机运行至a点起始位置,完成倒矿过程,可以再次进行采矿动作,进行循环。
43.在采矿路径和倒矿路径中,某些定位点会经过多次,根据铲运机车头方向和移动方向的不同,相应定位点的功能定义也不同,不会造成指令的混乱。
44.路径功能设置模块针对行驶路径中所有的定位点的功能进行定义,按照行驶路径方向逐个添加,定义完成后形成带有行驶指导功能的路径规划方案。即可将铲运机设定为自动驾驶模式按照设定路线自动运行。定位精度小于50cm,图1中a~h全路段覆盖。
45.路径生成模块生成出矿路径和倒矿路径,在出矿路径和倒矿路径中同一个定位点根据车头方向和行驶方向的不同定义不同的功能;路径生成模块生成路径后,铲运车根据规划的路径进入自动驾驶模式,沿着路径进行自动铲矿、倒矿。在实际操作过程中,将不同的控制手柄上的功能按键分别设置成出矿路径触发开关和倒矿路径触发开关,在启用自动驾驶前,人工选择是自动去铲矿的路径还是自动去倒矿路径,如选择的路径与设置的车头方向不匹配,则报警停车。
46.本实施例公开的一种井下铲运机的路径规划系统,通过导入cad巷道地图和电子地图生成整体规划地图,在地图中选定采场和溜井,规划铲运机的行驶路径,在行驶路径中对定位点进行功能定义,使铲运机行驶到定位点时能够自动进行下一步动作。满足铲运机在井下自动运行的要求,提升生产效率,降低人工操控风险。
47.虽然,上文中已经用一般性说明及具体实施例对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。