1.本发明涉及精密测量技术领域,尤其涉及一种光学位移测头空间姿态自校准方法与装置。
背景技术:
2.光学位移测头由于其非接触、无损、快速、高精度的优点逐渐取代传统的接触式测头成为三维形貌仪、非接触三坐标、非接触轮廓仪等高端几何特征检测仪器的核心部件。这类仪器通过结合运动机构的位置数据与光学位移测头的测量数据,重构出实际被测物表面的空间点云,从而实现被测工件的面形、轮廓、圆度、平面度等多种以长度为计量单位的几何特征的准确检测。为保证这类仪器具备高测量精度与长期精度稳定性,必须对其测头姿态、非线性等核心误差源进行标定与校准。传统姿态校准方法如采用激光跟踪仪、标准球等进行测头姿态标定的方法不仅成本高昂,而且通常针对每种姿态误差的标定都需要专用的标定设备,导致操作繁琐,难以适应高效率与常态化校准的需求。
技术实现要素:
3.本发明的目的是针对现有技术不足,提供光学位移测头空间姿态自校准方法与装置。
4.为达到上述目的,本发明采用技术方案如下:
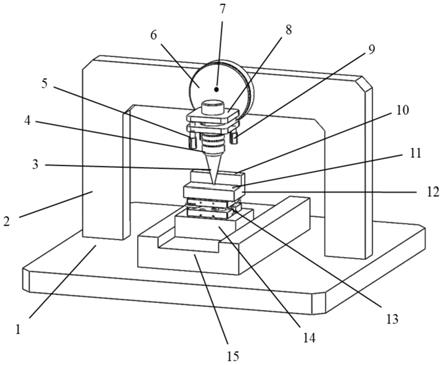
5.本发明包括基座(1)、龙门架(2)、光学位移测头光束(3)、光学位移测头(4)、电动俯仰姿态调整促动器(5)、摆动台(6)、旋转中心(7)、电动调整架(8)、电动偏摆姿态调整促动器(9)、标准台阶量块高面(10)、标准台阶量块低面(11)、标准台阶量块(12)、工件调平台(13)、直线运动轴动子(14)、直线运动轴定子(15);
6.基座(1)上安装有龙门架(2),龙门架(2)中心固定摆动台(6),摆动台(6)上面安装电动调整架(8),电动调整架由电动俯仰姿态调整促动器(5)与电动偏摆姿态调整促动器(9)驱动,进行光学位移测头(4)的姿态调整;基座(1)中心安装直线运动轴定子(15)与直线运动轴动子(14);直线运动轴动子(14)上方依次安装工件调平台(13)与标准台阶量块(12);光学位移测头(4)发射测量光束(3),可获取标准台阶量块高面(10)与标准台阶量块低面(11)的位置测量。
7.进一步的,所述的光学位移测头(4)自身回转对称,因此在三维空间的俯仰、偏摆、滚转三个姿态中,滚转运动不产生姿态偏差,只需要校准俯仰姿态偏差与偏摆姿态偏差即可实现三维姿态误差的校准。
8.一种光学位移测头空间姿态自校准方法,包括以下步骤:
9.步骤1、工件调平:将标准台阶量块(12)放置于工件调平台(13)上,并调整水平;
10.步骤2、俯仰姿态校准:标准台阶量块(12)固定不动,移动直线运动轴(12)与摆动运动轴(6)调整光学位移测头(4)垂直向下测量标准台阶量块低面(11),通过摆动运动轴(7)带动光学位移测头(4)摆动扫描标准台阶量块低面(11),扫描过程中实时记录摆动角度
b与测头读数d,根据扫描数据进行最小二乘拟合计算光学位移测头(4)的偏摆姿态角度偏差,并通过电动偏摆姿态调整促动器(9)进行自动校准;
11.步骤3、偏摆姿态校准:光学位移测头(4)固定且垂直向下,通过直线运动轴动子(14)带动标准台阶量块(12)往复运动,以使光学位移测头采集标准台阶量块高面(10)与标准台阶量块低面(11)高度数据,根据两者之间高差与标准台阶量块(12)理论台阶高差之间的关系计算俯仰角度误差,并通过电动俯仰姿态调整促动器(5)进行自动校准。
12.进一步的,光学位移测头的偏摆姿态校准具体包括以下步骤:
13.2-1.控制光学位移测头(4)垂直向下指向标准台阶量块(12),通过直线运动轴(15)调整标准台阶量块(12)的位置使标准台阶量块低面(11)位于光学位移测头(4)量程;
14.2-2.设定光学位移测头(4)偏摆姿态偏角误差极限为β0;
15.2-3.通过摆动运动轴(6)带动光学位移测头(4)沿逆时针方向扫描,直至被测点超出量程,自动记录超出量程前的摆动运动轴(6)的角度位置为b1;
16.2-4.通过摆动运动轴(6)带动光学位移测头(4)沿顺时针方向扫描,直至被测点超出量程,自动记录超出量程前的摆动运动轴(6)的角度位置为b2;
17.2-5.控制摆动运动轴(6)带动光学位移测头(7)从b1位置扫描到b2位置,在扫描过程中实时记录下摆动运动轴(6)的摆动角度b与光学位移测头(4)的读数d,得到一系列数据组(bi,di),i=1,2,3
…
,n;
18.2-6.光学位移测头(4)摆动的平面与标准台阶量块低面(11)之间的交线即为扫描的轨迹,以旋转中心(7)为原点建立坐标系,则该轨迹满足空间任意直线方程:
19.hx iy j=0
ꢀꢀꢀ
(1)
20.其中h、i、j为未知数;设旋转中心(7)与标准台阶量块低面(11)的距离为d,光学位移测头(4)垂直位置与标准台阶量块低面(11)法线的偏差为β,光学位移测头(4)量程中心到旋转中心(7)的距离为l;光学位移测头(4)在旋转扫描过程中由旋转中心(7)到被测点之间的距离在标准台阶量块低面(11)法线上的投影始终为d,则可得到以下关系:
[0021][0022]
2-7.每个扫描过程中每组数据(bi,di)均满足公式,因此可构建最小二乘算法进行拟合,可求出光学位移测头姿态偏摆角β:
[0023][0024]
2-8.通过电动偏摆姿态调整促动器(9)调整光学位移测头(4)偏摆姿态,调整量为-β;
[0025]
2-9.重复步骤2-4~步骤2-7,验证调整后的光学位移测头(4)偏摆姿态偏角β;如β》β0则重复步骤2-4~步骤2-8,否则即完成光学位移测头(4)偏摆姿态的自校准。
[0026]
进一步的,通过标准台阶量块(12)的标准台阶量块低面(11)构建空间内的基准平面,标定光学位移测头(4)相对于该基准平面法线的夹角来确定光学位移测头(4)的偏摆姿态偏角,从而通过电动偏摆姿态调整促动器(9)的微调运动进行校准。
[0027]
进一步的,俯仰姿态校准具体包括以下步骤:
[0028]
3-1.通过摆动运动轴(6)带动光学位移测头(4)旋转至垂直向下位置;
[0029]
3-2.设定光学位移测头(4)的俯仰姿态偏角误差极限为α0;
[0030]
3-3.控制直线运动轴动子(14)带动标准台阶量块(11)前后扫运动,使光学位移测头(4)可分别测量出标准台阶量块高面(10)的位置d1与标准台阶量块低面(11)的位置d2;
[0031]
3-4.标准台阶量块高面(10)与标准台阶量块低面(11)之间的实际高度差已知为δh,则光学位移测头的俯仰姿态偏角为:
[0032][0033]
3-5.通过电动俯仰姿态调整促动器(5)调整光学位移测头(4)俯仰姿态,调整量为-α;
[0034]
3-6.重复步骤3-3~步骤3-4,验证调整后的光学位移测头(4)俯仰姿态偏角α;如α》α0则重复步骤3-3~步骤3-5,否则即完成光学位移测头(4)俯仰姿态的自校准。
[0035]
进一步的,通过标准台阶量块高面(10)与标准台阶量块低面(11)之间的已知高度差作为高度基准结合光学位移测头(4)对两者的实际测量结果求解出光学位移测头(4)的俯仰姿态偏角,从而通过电动俯仰姿态调整促动器(5)的微调运动进行校准。
[0036]
本发明有益效果如下:
[0037]
本发明提出一种通过光学位移测头扫描标准台阶量块获取测量数据,并通过测头自身的扫描数据标定并校准测头自身空间姿态的自校准方法与装置,该方法结合基于直线促动器的位姿调整机构,可根据扫描结果计算出光学位移测头的俯仰姿态误差及偏摆姿态误差并自动进行校准,实现如光谱共焦传感器、激光干涉仪位移传感器等精密光学位移测头的全自动化空间姿态标定,对于提升集成这类测头的三维形貌仪、非接触轮廓仪等仪器的测量精度与使用效率具有重要意义。
[0038]
本发明针对坐标测量机、圆柱度仪中的测头高精度姿态校准需求,提供一种光学位移测头空间姿态自校准方法,该方法通过摆动扫描与直线扫描测量标准台阶量块两种形式分别实现探头俯仰姿态与偏摆姿态的精确自动化校准,可快速有效消除探头的姿态误差,从而提升这类检测系统的测量精度。
附图说明
[0039]
图1为光学位移测头的空间姿态误差校准装置
[0040]
图2为光学位移测头的空间姿态误差示意
[0041]
图3为光学位移测头空间姿态误差校准整体流程
[0042]
图4为光学位移测头偏摆姿态误差校准流程
[0043]
图5为光学位移测头俯仰姿态误差校准流程
[0044]
图6光学位移测头偏摆姿态误差校准原理
[0045]
图7光学位移测头俯仰姿态误差校准原理
具体实施方式
[0046]
下面结合附图对本发明做进一步详述。
[0047]
如图1所示,基座(1)上安装有龙门架(2),龙门架(2)中心固定摆动台(6),绕旋转中心(7)转动,摆动台(6)上面安装电动调整架(8),电动调整架由电动俯仰姿态调整促动器
(5)与电动偏摆姿态调整促动器(9)驱动进行光学位移测头(4)的姿态调整。基座(1)中心安装直线运动轴定子(15)与直线运动轴动子(14)。上方依次安装工件调平台(13)与标准台阶量块(12)。光学位移测头(4)发射测量光束(3),可获取标准台阶量块高面(10)与标准台阶量块低面(11)的位置测量。
[0048]
如图2所示的光学位移测头(4),可以建立笛卡尔直角坐标系描述其姿态,沿x、y、z方向的水平位置,与绕x轴旋转的α向俯仰运动,绕y轴旋转的β向偏摆运动,绕z轴旋转的γ向滚转运动。光学位移测头(4)自身绕z轴回转对称,因此在三维空间的俯仰、偏摆、滚转三个姿态中,γ方向的滚转运动不产生姿态偏差,只需要校准俯仰姿态偏差与偏摆姿态偏差即可实现三维姿态误差的校准。
[0049]
如图3所示,光学位移测头空间姿态误差校准整体流程包括:
[0050]
(1)将标准台阶量块(12)放置于工件调平台(13)上,并调整水平;
[0051]
(2)标准台阶量块(12)固定不动,移动直线运动轴(14)与摆动运动轴(6)调整光学位移测头(4)垂直向下测量标准台阶量块低面(11);
[0052]
(3)摆动运动轴(6)带动光学位移测头(4)摆动扫描标准台阶量块低面(11),扫描过程中实时记录摆动角度b与测头读数d,根据扫描数据进行最小二乘拟合计算光学位移测头(4)的偏摆姿态角度偏差β,并通过电动偏摆姿态调整促动器(9)进行自动校准;
[0053]
(4)移动摆动运动轴(6)调整光学位移测头(4)垂直向下,通过直线运动轴动子(14)带动标准台阶量块(12)往复运动,使光学位移测头采集标准台阶量块高面(10)与标准台阶量块低面(11)高度差数据,计算俯仰角度误差α,并通过电动俯仰姿态调整促动器(5)进行自动校准。
[0054]
如图4所示,光学位移测头偏摆姿态误差校准流程包括:
[0055]
①
移动直线运动轴(14)与摆动运动轴(6)调整光学位移测头(4)垂直向下测量标准台阶量块低面(11),并使其位于光学位移测头量程(4)内;
[0056]
②
设定光学位移测头(4)偏摆姿态偏角误差极限为β0[0057]
③
通过摆动运动轴(6)带动光学位移测头(4)沿逆时针和顺时针方向分别进行扫描,直至被测点超出量程,自动记录超出量程前的摆动运动轴(6)的角度位置为b0和b1;
[0058]
④
控制摆动运动轴(6)带动光学位移测头(4)从b0位置扫描到b1位置,在扫描过程中实时记录下摆动运动轴(6)的摆动角度b与测头的读数d,得到一系列数据组(bi,di),i=1,2,3
…
,n,代入前述公式中进行最小二乘算法拟合,可求出测头姿态偏摆角β,通过电动偏摆姿态调整促动器(9)调整光学位移测头(4)偏摆姿态,调整量为-β;
[0059]
⑤
重复步骤
④
,验证调整后的光学位移测头(4)偏摆姿态偏角β。如β》β0则重复步骤
④
,否则即完成光学位移测头(4)偏摆姿态的自校准。
[0060]
如图5所示,光学位移测头俯仰姿态误差校准流程包括:
[0061]
1)通过摆动运动轴(6)带动光学位移测头(4)旋转至垂直向下位置;
[0062]
2)设定光学位移测头(4)的俯仰姿态偏角误差极限为α0;
[0063]
3)控制直线运动轴动子(14)带动标准台阶量块(11)前后扫运动,使光学位移测头(4)测量出标准台阶量块高面(10)与标准台阶量块低面(11)的高度差,代入前述公式中可以求出光学位移测头(4)的俯仰姿态偏角α,通过电动俯仰姿态调整促动器(5)调整光学位移测头(4)俯仰姿态,调整量为-α;
[0064]
4)重复步骤3),验证调整后的光学位移测头(4)俯仰姿态偏角α。如α》α0则重复步骤3),否则即完成光学位移测头(4)俯仰姿态的自校准。
[0065]
如图6所示,通过直线运动轴动子(14)调整标准台阶量块(12)的位置使标准台阶量块低面(11)位于光学位移测头量程(4)内,控制摆动运动轴(6)带动光学位移测头(4)在角度极限位置b0与b1内连续扫描,在扫描过程中实时记录下摆动运动轴(6)的摆动角度b与测头的读数d,得到一系列数据组(bi,di),i=1,2,3
…
,n。将扫描过程中每组数据(bi,di)代入公式中构建最小二乘算法进行拟合,可求出测头姿态偏摆角β。通过电动偏摆姿态调整促动器(9)使用调整量-β调整光学位移测头(4)偏摆姿态,重复以上过程直到β《β0时完成光学位移测头(4)偏摆姿态的自校准。
[0066]
如图7所示,通过摆动运动轴(6)带动光学位移测头(4)旋转至垂直向下位置。控制直线运动轴动子(14)带动标准台阶量块(11)前后运动,使光学位移测头(4)分别测量出标准台阶量块(11)在位置1和位置2处的高度之差。根据标准台阶量块高面(10)与标准台阶量块低面(11)之间的实际已知高度差可以计算求出测头姿态偏摆角α。通过电动俯仰姿态调整促动器(5)使用调整量-α调整光学位移测头(4)俯仰姿态,重复以上过程直到α《α0时完成光学位移测头(4)俯仰姿态的自校准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。