1.本发明涉及电机生产设备领域,尤其涉及一种电机端子自动装配焊接设备。
背景技术:
2.目前,市场上现有的电机端子装配、焊接和测试至少需要3个人完成这项工作,人员数量多,劳动效率低,劳动成本高,生产速度慢,且生产质量不稳定。
技术实现要素:
3.本发明要解决的技术问题和提出的技术任务是对现有技术方案进行完善与改进,提供一种电机端子自动装配焊接设备,以实现自动化端子装配和焊接,降低劳动成本、提高生产效率和产品质量为目的。为此,本发明采取以下技术方案。
4.一种电机端子自动装配焊接设备,包括台桌、六工位转盘和人机交互控制装置,所述的台桌上环绕六工位转盘按工位顺序设置有用于实现锭子上料的锭子上料组件、用于实现端子上料及装配的端子上料装配组件、用于焊接端子的端子焊接组件、用于检测端子焊接质量的锭子通电测试组件、用于将测试不合格的产品移除的不合格品剔除组件和用于实现锭子下料的锭子下料组件,所述的六工位转盘的下方的台桌上设有六工位分割器和与之连接的分割器驱动电机,所述的六工位分割器与六工位转盘连接,六工位转盘的六个工位上设有工件定位工装以定位锭子,所述的人机交互控制装置与分割器驱动电机、锭子上料组件、端子上料装配组件、端子焊接组件、锭子通电测试组件、不合格品剔除组件和锭子下料组件均电连接,所述的台桌上设有通过定位顶升驱动装置驱动的竖向朝上的用于精确定位的定位销,所述的六工位转盘上设有与定位销相配的六个环绕均布的定位孔。
5.在人机交互控制装置控制下,锭子上料组件用于实现自动上料,分割器驱动电机驱动分割器带动六工位转盘转动一个工位角度,把已经上料的锭子带动到端子上料装配组件所在的工位,进行端子装配,然后六工位转盘继续转动把端子装配后的锭子转动到端子焊接组件所在的工位进行焊接,六工位转盘再继续转动到锭子通电测试组件所在的工位进行通电检测,检测结束后,六工位转盘再继续转动一个工位,使检测后的锭子到达不合格品剔除组件,在人机交互控制装置的判断控制下,对不合格品进行剔除,继续旋转一个工位,把合格品下料,在六工位转盘每转动一个工位时,定位顶升驱动装置驱动定位销向上插入定位孔,实现精确定位,在下一工位进行工作时,上一工位同时进行本工位的工作任务,使各个工位的工作能够并行处理,有效实现锭子的自动化端子装配和焊接,大大提升了生产效率,降低了劳动成本,提高了产品质量。
6.作为优选技术手段:所述的锭子上料组件包括夹取机构、翻转机构和上料组件底座,所述的夹取机构和翻转机构设于上料组件底座上,所述的夹取机构包括翻转座、设于翻转座上的夹紧驱动装置、和连接于夹紧驱动装置上的用于夹住锭子的夹紧手指,所述的翻转机构包括翻转驱动装置、直线导轨、齿条、与齿条相啮合的齿轮,所述的齿条通过其下端的滑槽块底座与直线导轨滑动相配,所述的翻转驱动装置的驱动端通过连接件与滑槽块底
座连接固定,所述的齿轮通过齿轮中心轴与翻转座连接固定,所述的翻转座通过齿轮中心轴可转动的设于上料组件底座上,所述的上料组件底座上设有翻转角度限位器,所述的顶升接料装置包括位于锭子上料组件所在工位下方的顶升接料驱动装置,所述的顶升接料驱动装置的驱动端向上,驱动端连接有接料定位支撑。该结构可方便地实现锭子的翻转上料,翻转上料时,通过顶升接料驱动装置驱动接料定位支撑向上伸出接取锭子,然后缩回将锭子放置在转盘工位上,通过转盘工位上的工件定位工装完成上料动作。
7.作为优选技术手段:所述的端子上料装配组件包括第一支架座、第二支架座、振动座、端子振动盘、端子导槽、端子移动机构、锭子定位压紧机构和端子装配压入机构,所述的锭子定位压紧机构和端子装配压入机构设于第一支架座上,所述的端子移动机构设于第二支架座上,所述的端子振动盘设于振动座上,所述的端子振动盘上的端子导出口与端子导槽的端子导入口相连,所述的端子导槽的端子导出口与端子移动机构的端子接收口相连,端子移动机构对端子移动转向后送入端子装配压入机构,在锭子定位压紧机构对锭子定位压紧后,端子装配压入机构把端子压入到锭子上的装配位置。该结构可方便地实现端子的理正、移动和装配压入。
8.作为优选技术手段:所述的端子移动机构包括设于第二支架座上的滑槽驱动装置、推入驱动装置、旋转驱动装置和推出驱动装置,所述的滑槽驱动装置竖向设置,滑槽驱动装置的上面通过驱动端连接有端子滑槽,端子滑槽上设有所述的端子接收口,所述的推入驱动装置水平向设置,推入驱动装置的驱动端连接有第二端子推料块,所述的旋转驱动装置的驱动端连接有旋转工装,所述的第二端子推料块和旋转工装之间设有与第二端子推料块滑动相配的第一转移滑槽,所述的推出驱动装置的驱动端连接有第三端子推料块,所述的第三端子推料块与第二支架座上设置的第二转移滑槽相配,所述的端子装配压入机构包括设于第一支架座上的竖向压入驱动装置,所述的压入驱动装置的驱动端连接有竖向移动的第一端子推料块,所述的锭子定位压紧机构包括设于第一支架座上的定位压紧驱动装置,所述的定位压紧驱动装置的驱动端连接有定位压板,所述的定位压板上设有竖向的第三转移滑槽,第二转移滑槽连通旋转工装和第三转移滑槽,所述的端子从端子导槽进入端子滑槽的端子接收口后,滑槽驱动装置驱动端子滑槽下移到第二端子推料块的推料位置,由推入驱动装置驱动第二端子推料块推动端子进入旋转工装,再由旋转驱动装置驱动旋转工装旋转,使端子旋转到待装配角度,然后由推出驱动装置驱动第三端子推料块推动端子推入到第三转移滑槽,在定位压板压紧锭子后,由压入驱动装置驱动第一端子推料块把端子向下压入到锭子装配位置。能有效实现端子的多次转向移动,实现端子的方位改变,最终压入到装配位置。
9.作为优选技术手段:所述的端子焊接组件包括焊枪、焊枪水平向驱动装置、焊枪竖向驱动装置、焊枪控制器、焊丝装载装置、焊丝进给装置和焊接组件支架座,所述的焊枪竖向驱动装置的驱动端位于下端,驱动端连接所述的焊枪,所述的焊枪竖向驱动装置和焊丝进给装置通过连接底座连接于焊枪水平向驱动装置的驱动端,所述的焊丝装载装置和焊枪水平向驱动装置设置于焊接组件支架座上,所述的焊枪控制器设置于台桌上。该结构能有效实现了焊丝的自动进给,焊枪通过焊枪水平向驱动装置、焊枪竖向驱动装置在水平向和竖向两个方向的位置控制,移动到焊接点,实现端子的自动焊接。
10.作为优选技术手段:所述的焊接组件支架座包括竖向设置于台桌上的调节丝杆、
位于调节丝杆两侧的2根支撑导杆、连接固定于焊枪水平向驱动装置下面的驱动装置底座,所述的调节丝杆通过丝杆螺母与驱动装置底座连接固定,所述的2根支撑导杆通过多个可松紧调节的导滑固定座与驱动装置底座连接固定,所述的焊丝装载装置通过可松紧调节的导滑固定座连接固定于其中一根支撑导杆上。可方便根据焊接位置的实际高低通过调节丝杆进行高度调节,便于适应不同高度的锭子。
11.作为优选技术手段:所述的锭子通电测试组件包括测试组件支架、竖向驱动测试驱动装置、2个导电探针、压紧定位板、探针座和驱动装置连接座,所述的竖向驱动测试驱动装置设置于测试组件支架的上部,所述的驱动装置连接座与竖向驱动测试驱动装置的驱动侧连接,所述的探针座设置于压紧定位板上,所述的压紧定位板通过多个导向柱与驱动装置连接座上设置的直线轴承滑动相配连接,导向柱上套有弹簧,所述的2个导电探针分别对准锭子和端子的检测位置,所述的2个导电探针通过电源线连接到电源。可方便实现导电性测试,便于进行不合格品检测。
12.作为优选技术手段:所述的不合格品剔除组件包括剔除组件底座、横移驱动装置、升降驱动装置、夹取驱动装置、满料检测传感器和不合格品物流道,所述的横移驱动装置设置于剔除组件底座上部,所述的升降驱动装置通过横移连接座连接于横移驱动装置的驱动端,所述的横移连接座通过导向滑动组件与剔除组件底座连接,所述的导向滑动组件共2套,分别设置于横移驱动装置的上下两侧并与横移驱动装置平行设置,所述的夹取驱动装置连接固定于升降驱动装置下端的驱动端,夹取驱动装置的驱动端朝下,其驱动端连接有锭子夹取爪手,所述的不合格品物流道成倾角设置于台桌上,所述的满料检测传感器设置于剔除组件底座上,所述的满料检测传感器的检测头对准不合格品物流道上的锭子满料位置。本组件通过横移驱动装置、升降驱动装置和夹取驱动装置的驱动将测试不合格的产品取出放置在不合格品物流道中,满料检测传感器是检测到不合格品物流道中不合格品放满后,将信号传递给人机交互控制装置进行报警,通知操作人员及时清理。
13.作为优选技术手段:所述的锭子下料组件包括下料组件支架、下料升降驱动装置、下料旋转驱动装置、下料夹爪驱动装置、夹爪座板和用于夹取锭子的2套夹爪,所述的下料升降驱动装置通过升降驱动装置座板连接固定于下料组件支架的顶部,所述的下料旋转驱动装置通过旋转驱动装置座板连接固定于下料升降驱动装置下侧的驱动端, 所述的2套夹爪对称地连接于夹爪座板的两端下侧,所述的夹爪座板的中部连接于下料旋转驱动装置下侧的驱动端,夹爪座板的旋转中心设有一根向下的支撑轴与下料组件支架的下部连接固定,支撑轴与夹爪座板之间可转动连接。锭子下料组件通过下料升降驱动装置将下料夹爪驱动装置下降至抓取位置,再由下料夹爪驱动装置控制夹爪将产品夹紧,再由下料升降驱动装置将下料夹爪驱动装置提升至上限位置,最后由下料旋转驱动装置控制旋转180度至下料位置进行产品下料。
14.作为优选技术手段:所述的台桌上设有设备护罩,所述的人机交互控制装置设于设备护罩的中部,并位于锭子上料的操作侧。人机交互控制装置的高度和位置合适,便于人机交互操作。
15.作为优选技术手段:所述的端子上料装配组件和锭子通电测试组件所在工位的正下方各设有一块由顶升支撑驱动装置驱动的顶升支撑板。
16.有益效果:该设备可有效实现锭子的上料、端子装配、端子焊接、不合品检测、不合
格品剔除和合格品下料,通过转盘的六工位的控制操作,可实现流水线化六工位并行处理,有效实现锭子的自动化端子装配和焊接,大大提升了生产效率,降低了劳动成本,提高了产品质量。
附图说明
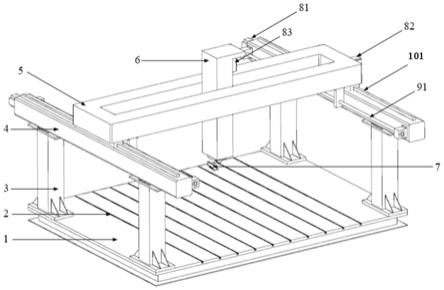
17.图1是本发明结构示意图。
18.图2是本发明各组件工位布局示意图。
19.图3是本发明六工位转盘结构示意图。
20.图4是本发明锭子上料组件结构示意图。
21.图5是本发明端子上料装配组件结构示意图。
22.图6是本发明另一视向的端子上料装配组件结构示意图。
23.图7是本发明端子焊接组件结构示意图。
24.图8是本发明另一视向的端子焊接组件结构示意图。
25.图9是本发明锭子通电测试组件结构示意图。
26.图10是本发明不合格品剔除组件结构示意图。
27.图11是本发明锭子下料组件结构示意图。
28.图中:1-台桌;2-六工位转盘;3-人机交互控制装置;4-锭子上料组件;5-端子上料装配组件;6-端子焊接组件;7-锭子通电测试组件;8-不合格品剔除组件;9-锭子下料组件;10-设备护罩;11-六工位分割器;12-分割器驱动电机;13-工件定位工装;14-锭子;15-定位顶升驱动装置;16-定位销;17-顶升支撑驱动装置;18-顶升支撑板;201-定位孔;401-顶升接料驱动装置;402-接料定位支撑;403-上料组件底座;404-翻转座;405-夹紧驱动装置;406-夹紧手指;407-翻转驱动装置;408-直线导轨;409-齿条;410-齿轮;411-滑槽块底座;412-连接件;501-第一支架座;502-第二支架座;503-振动座;504-端子振动盘;505-端子导槽;506-滑槽驱动装置;507-推入驱动装置;508-旋转驱动装置;509-推出驱动装置;510-端子滑槽;511-第二端子推料块;512-旋转工装;513-第一转移滑槽;514-第三端子推料块;515-第二转移滑槽;516-压入驱动装置;517-第一端子推料块;518-定位压紧驱动装置;519-定位压板;520-第三转移滑槽;601-焊枪;602-焊枪水平向驱动装置;603-焊枪竖向驱动装置;604-焊枪控制器;605-焊丝装载装置;606-焊丝进给装置;607-焊接组件支架座;608-连接底座;60701-调节丝杆;60702-支撑导杆;60703-驱动装置底座;60704-丝杆螺母;60705-导滑固定座;701-测试组件支架;702-竖向驱动测试驱动装置;703-导电探针;704-压紧定位板;705-探针座;706-驱动装置连接座;707-导向柱;708-直线轴承;709-弹簧;801-剔除组件底座;802-横移驱动装置;803-升降驱动装置;804-夹取驱动装置;805-满料检测传感器;806-不合格品物流道;807-横移连接座;808-导向滑动组件;809-锭子夹取爪手;901-下料组件支架;902-下料升降驱动装置;903-下料旋转驱动装置;904-下料夹爪驱动装置;905-夹爪座板;906-夹爪;907-升降驱动装置座板;908-旋转驱动装置座板;909-支撑轴。
具体实施方式
29.以下结合说明书附图对本发明的技术方案做进一步的详细说明。
30.如图1-11所示,一种电机端子自动装配焊接设备,包括台桌1、六工位转盘2和人机交互控制装置3,台桌1上环绕六工位转盘2按工位顺序设置有用于实现锭子14上料的锭子上料组件4、用于实现端子上料及装配的端子上料装配组件5、用于焊接端子的端子焊接组件6、用于检测端子焊接质量的锭子通电测试组件7、用于将测试不合格的产品移除的不合格品剔除组件8和用于实现锭子14下料的锭子下料组件9,六工位转盘2的下方的台桌1上设有六工位分割器11和与之连接的分割器驱动电机12,六工位分割器11与六工位转盘2连接,六工位转盘2的六个工位上设有工件定位工装13以定位锭子14,人机交互控制装置3与分割器驱动电机12、锭子上料组件4、端子上料装配组件5、端子焊接组件6、锭子通电测试组件7、不合格品剔除组件8和锭子下料组件9均电连接,台桌1上设有通过定位顶升驱动装置15驱动的竖向朝上的用于精确定位的定位销16,定位销16的上端设有导向锥度,六工位转盘2上设有与定位销16相配的六个环绕均布的定位孔201。
31.为了实现锭子14翻转上料,锭子上料组件4包括夹取机构、翻转机构和上料组件底座403,夹取机构和翻转机构设于上料组件底座403上,夹取机构包括翻转座404、设于翻转座404上的夹紧驱动装置405、和连接于夹紧驱动装置405上的用于夹住锭子14的夹紧手指406,翻转机构包括翻转驱动装置407、直线导轨408、齿条409、与齿条409相啮合的齿轮410,齿条409通过其下端的滑槽块底座411与直线导轨408滑动相配,翻转驱动装置407的驱动端通过连接件412与滑槽块底座411连接固定,齿轮410通过齿轮410中心轴与翻转座404连接固定,翻转座404通过齿轮410中心轴可转动的设于上料组件底座403上,上料组件底座403上设有翻转角度限位器,顶升接料装置包括位于锭子上料组件4所在工位下方的顶升接料驱动装置401,顶升接料驱动装置401的驱动端向上,驱动端连接有接料定位支撑402。该结构可方便地实现锭子14的180度翻转上料,翻转上料时,通过顶升接料驱动装置401驱动接料定位支撑402向上伸出接取锭子14,然后缩回将锭子14放置在转盘工位上,通过转盘工位上的工件定位工装13完成上料动作。
32.为了实现端子装配,端子上料装配组件5包括第一支架座501、第二支架座502、振动座503、端子振动盘504、端子导槽505、端子移动机构、锭子定位压紧机构和端子装配压入机构,锭子定位压紧机构和端子装配压入机构设于第一支架座501上,端子移动机构设于第二支架座502上,端子振动盘504设于振动座503上,端子振动盘504上的端子导出口与端子导槽505的端子导入口相连,端子导槽505的端子导出口与端子移动机构的端子接收口相连,端子移动机构对端子移动转向后送入端子装配压入机构,在锭子定位压紧机构对锭子14定位压紧后,端子装配压入机构把端子压入到锭子14上的装配位置。该结构可方便地实现端子的理正、移动和装配压入。
33.为了实现端子的方位改变和移动,端子移动机构包括设于第二支架座502上的滑槽驱动装置506、推入驱动装置507、旋转驱动装置508和推出驱动装置509,滑槽驱动装置506竖向设置,滑槽驱动装置506的上面通过驱动端连接有端子滑槽510,端子滑槽510上设有端子接收口,推入驱动装置507水平向设置,推入驱动装置507的驱动端连接有第二端子推料块511,旋转驱动装置508的驱动端连接有旋转工装512,第二端子推料块511和旋转工装512之间设有与第二端子推料块511滑动相配的第一转移滑槽513,推出驱动装置509的驱动端连接有第三端子推料块514,第三端子推料块514与第二支架座502上设置的第二转移滑槽515相配,端子装配压入机构包括设于第一支架座501上的竖向压入驱动装置516,压入
驱动装置516的驱动端连接有竖向移动的第一端子推料块517,锭子定位压紧机构包括设于第一支架座501上的定位压紧驱动装置518,定位压紧驱动装置518的驱动端连接有定位压板519,定位压板519上设有竖向的第三转移滑槽520,第二转移滑槽515连通旋转工装512和第三转移滑槽520,端子从端子导槽505进入端子滑槽510的端子接收口后,滑槽驱动装置506驱动端子滑槽510下移到第二端子推料块511的推料位置,由推入驱动装置507驱动第二端子推料块511推动端子进入旋转工装512,再由旋转驱动装置508驱动旋转工装512旋转,使端子旋转到待装配角度,然后由推出驱动装置509驱动第三端子推料块514推动端子推入到第三转移滑槽520,在定位压板519压紧锭子14后,由压入驱动装置516驱动第一端子推料块517把端子向下压入到锭子14装配位置。能有效实现端子的多次转向移动,实现端子的方位改变,最终压入到装配位置。
34.为了实现自动焊接,端子焊接组件6包括焊枪601、焊枪水平向驱动装置602、焊枪竖向驱动装置603、焊枪控制器604、焊丝装载装置605、焊丝进给装置606和焊接组件支架座607,焊枪竖向驱动装置603的驱动端位于下端,驱动端连接焊枪601,焊枪竖向驱动装置603和焊丝进给装置606通过连接底座608连接于焊枪水平向驱动装置602的驱动端,焊丝装载装置605和焊枪水平向驱动装置602设置于焊接组件支架座607上,焊枪控制器604设置于台桌1上。该结构能有效实现了焊丝的自动进给,焊枪601通过焊枪水平向驱动装置602、焊枪竖向驱动装置603在水平向和竖向两个方向的位置控制,移动到焊接点,实现端子的自动焊接。
35.为了针对不同高度的锭子14进行高度适配调节,焊接组件支架座607包括竖向设置于台桌1上的调节丝杆60701、位于调节丝杆60701两侧的2根支撑导杆60702、连接固定于焊枪水平向驱动装置602下面的驱动装置底座60703,调节丝杆60701通过丝杆螺母60704与驱动装置底座60703连接固定,2根支撑导杆60702各通过2个可松紧调节的导滑固定座60705与驱动装置底座60703连接固定,焊丝装载装置605通过可松紧调节的导滑固定座60705连接固定于其中一根支撑导杆60702上。可方便根据焊接位置的实际高低通过调节丝杆60701进行高度调节,便于适应不同高度的锭子14。
36.为了实现不合格品的检测,锭子通电测试组件7包括测试组件支架701、竖向驱动测试驱动装置702、2个导电探针703、压紧定位板704、探针座705和驱动装置连接座706,竖向驱动测试驱动装置702设置于测试组件支架701的上部,驱动装置连接座706与竖向驱动测试驱动装置702的驱动侧连接,探针座705设置于压紧定位板704上,压紧定位板704通过多个导向柱707与驱动装置连接座706上设置的直线轴承708滑动相配连接,导向柱707上套有弹簧709,2个导电探针703分别对准锭子14和端子的检测位置,2个导电探针703通过电源线连接到电源。可方便实现导电性测试,便于进行不合格品检测。
37.为了实现不合格品的移除,不合格品剔除组件8包括剔除组件底座801、横移驱动装置802、升降驱动装置803、夹取驱动装置804、满料检测传感器805和不合格品物流道806,横移驱动装置802设置于剔除组件底座801上部,升降驱动装置803通过横移连接座807连接于横移驱动装置802的驱动端,横移连接座807通过导向滑动组件808与剔除组件底座801连接,导向滑动组件808共2套,分别设置于横移驱动装置802的上下两侧并与横移驱动装置802平行设置,夹取驱动装置804连接固定于升降驱动装置803下端的驱动端,夹取驱动装置804的驱动端朝下,其驱动端连接有锭子夹取爪手809,不合格品物流道806成倾角设置于台
桌1上,满料检测传感器805设置于剔除组件底座801上,满料检测传感器805的检测头对准不合格品物流道806上的锭子14满料位置。本组件通过横移驱动装置802、升降驱动装置803和夹取驱动装置804的驱动将测试不合格的产品取出放置在不合格品物流道806中,满料检测传感器805是检测到不合格品物流道806中不合格品放满后,将信号传递给人机交互控制装置3进行报警,通知操作人员及时清理。
38.为了实现合格品下料,锭子下料组件9包括下料组件支架901、下料升降驱动装置902、下料旋转驱动装置903、下料夹爪驱动装置904、夹爪座板905和用于夹取锭子14的2套夹爪906,下料升降驱动装置902通过升降驱动装置座板907连接固定于下料组件支架901的顶部,下料旋转驱动装置903通过旋转驱动装置座板908连接固定于下料升降驱动装置902下侧的驱动端, 2套夹爪906对称地连接于夹爪座板905的两端下侧,夹爪座板905的中部连接于下料旋转驱动装置903下侧的驱动端,夹爪座板905的旋转中心设有一根向下的支撑轴909与下料组件支架901的下部连接固定,支撑轴909与夹爪座板905之间可转动连接。锭子下料组件9通过下料升降驱动装置902将下料夹爪驱动装置904下降至抓取位置,再由下料夹爪驱动装置904控制夹爪906将合格产品夹紧,然后由下料升降驱动装置902将下料夹爪驱动装置904提升至上限位置,最后由下料旋转驱动装置903控制旋转180度至下料位置进行合格品下料。
39.为了便于人机交互操作和防护,台桌1上设有设备护罩10,人机交互控制装置3设于设备护罩10的中部,并位于锭子14上料的操作侧。人机交互控制装置3的高度和位置合适,便于人机交互操作。
40.为了防止台桌1受压变形导致生产故障,端子上料装配组件5和锭子通电测试组件7所在工位的正下方各设有一块由顶升支撑驱动装置17驱动的顶升支撑板18。可有效防止台桌1受压变形而导致生产故障。
41.在人机交互控制装置3控制下,锭子上料组件4用于实现自动上料,分割器驱动电机12驱动分割器带动六工位转盘2转动一个工位角度,把已经上料的锭子14带动到端子上料装配组件5所在的工位,进行端子装配,然后六工位转盘2继续转动把端子装配后的锭子14转动到端子焊接组件6所在的工位进行焊接,焊接后,六工位转盘2再继续转动到锭子通电测试组件7所在的工位进行通电检测,检测结束后,六工位转盘2再继续转动一个工位,使检测后的锭子14到达不合格品剔除组件8,在人机交互控制装置3的判断控制下,对不合格品进行剔除,继续旋转一个工位,把合格品下料,在六工位转盘2每转动一个工位时,定位顶升驱动装置15驱动定位销16向上插入定位孔201,实现精确定位,在下一工位进行工作时,上一工位同时进行本工位的工作任务,使各个工位的工作能够并行处理,有效实现流水线式的锭子14的自动化端子装配和焊接,大大提升了生产效率,降低了劳动成本,提高了产品质量。
42.本实例中,除顶升接料驱动装置401、压入驱动装置516、焊枪水平向驱动装置602和焊枪竖向驱动装置603采用电缸外,其他驱动装置均采用气缸。
43.以上图1-11所示的一种电机端子自动装配焊接设备是本发明的具体实施例,已经体现出本发明突出的实质性特点和显著进步,可根据实际的使用需要,在本发明的启示下,对其进行形状、结构等方面的等同修改,均在本方案的保护范围之列。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。